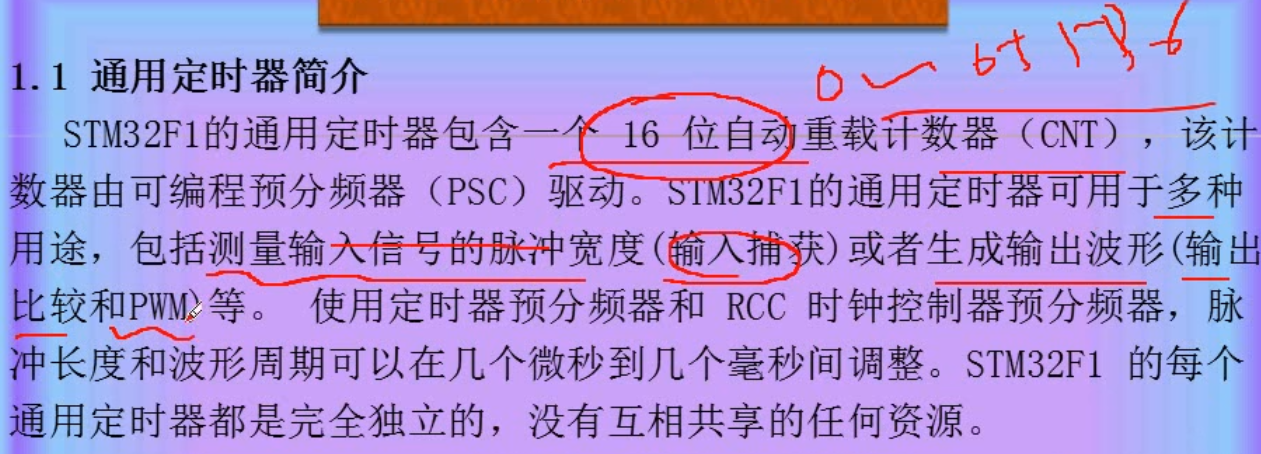
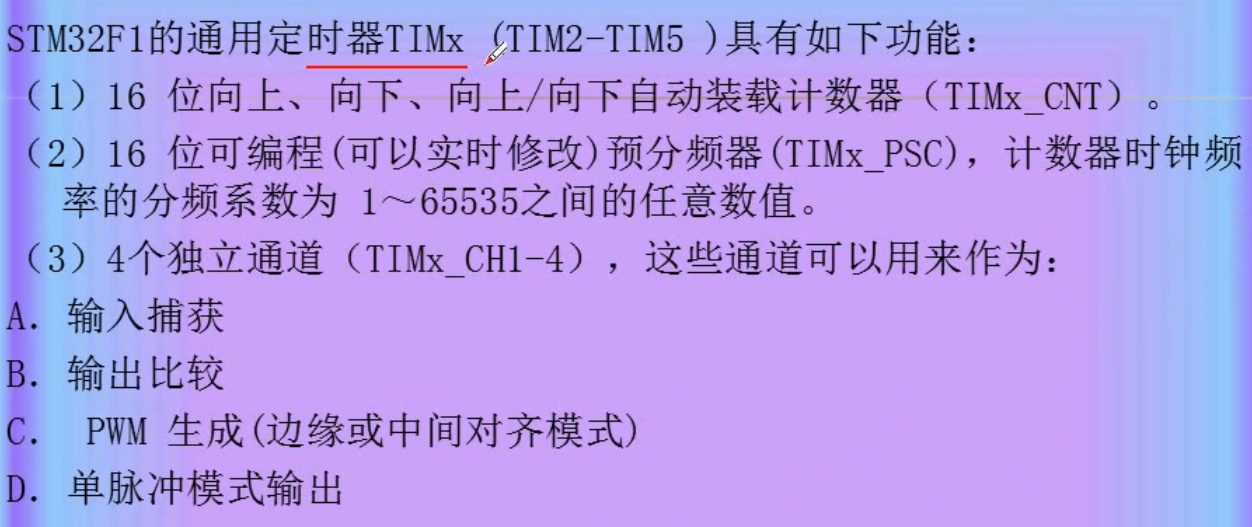
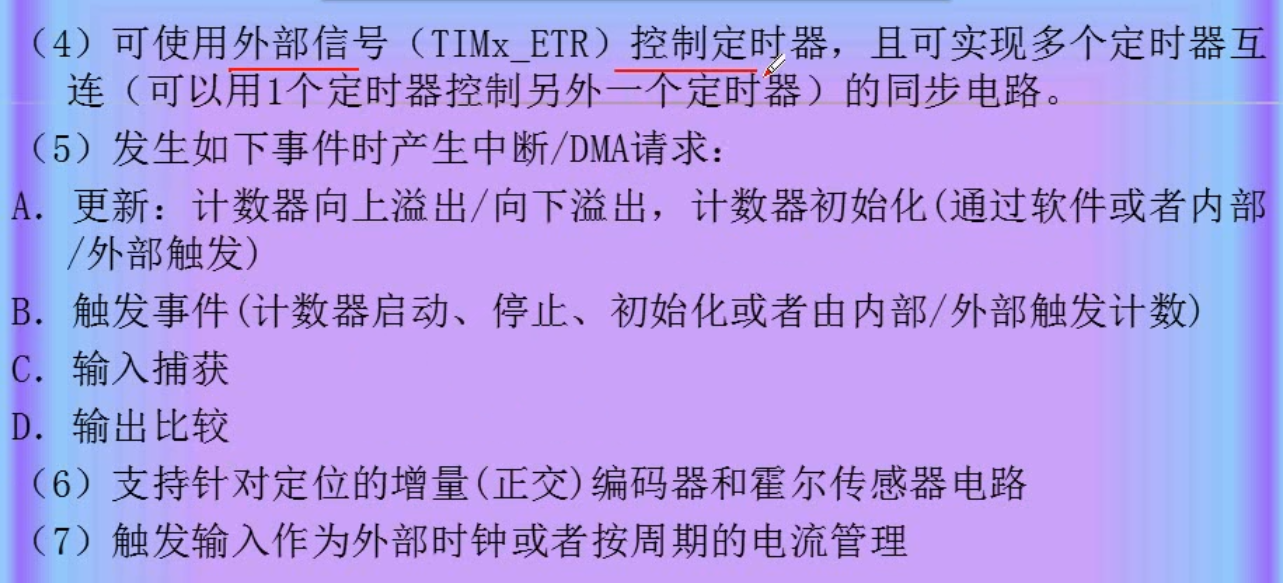
通用定时器
APB1默认为36M,36*2=72M,
计数器是0~65535

两个AHB/APB桥在AHB和2个APB总线间提供同步连接。 APB1操作速度限于36MHz, APB2操
作于全速(最高72MHz)。
注意: 当对APB寄存器进行8位或者16位访问时,该访问会被自动转换成32位的访问:桥会自动将8位
或者32位的数据扩展以配合32位的向量。
程序存储器、数据存储器、寄存器和输入输出端口被组织在同一个4GB的线性地址空间内。
下面的例子说明如何映射别名区中SRAM地址为0x20000300的字节中的位2:16进制的计算
0x22006008 = 0x22000000 + (0x300× 32) + (2× 4).
对0x22006008地址的写操作与对SRAM中地址0x20000300字节的位2执行读-改-写操作有着相
同的效果
128 256 512 1024
一个输入通道可以给两个捕获通道

时钟分频是设置采样滤波的
重复计数器是高级定时器需要设置的
分频系数会自动加一,为36000,不能超过65535
500ms=1000*36000/72M

读取状态标志位以及清除中断标志位,函数分别为TIM_GetFlagStatus和TIM_ClearFlag

time.c
#include "time.h"
#include "led.h"
void TIM4_Init(u16 pre,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;//结构体初始化
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE);//使能TIM4时钟
TIM_TimeBaseInitStructure.TIM_Prescaler=psc;//定时器预分频器
TIM_TimeBaseInitStructure.TIM_Period=pre; //定时器周期
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;//技术模式
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1; //时钟分频
TIM_TimeBaseInit(TIM4,&TIM_TimeBaseInitStructure);
TIM_ITConfig(TIM4,TIM_IT_Update,ENABLE);
TIM_ClearITPendingBit(TIM4,TIM_IT_Update);//清除标志
NVIC_InitStructure.NVIC_IRQChannel=TIM4_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2;//抢占式优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority=3; //响应优先级,0到3选择
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE; //使能中断通道
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM4,ENABLE);
}
void TIM4_IRQHandler(void)
{
if(TIM_GetITStatus(TIM4,TIM_IT_Update)==1)
{
led2=!led2;
}
TIM_ClearITPendingBit(TIM4,TIM_IT_Update);//清除标志
}
总结:1.TIM4初始化函数,定义变量
2.TIM和NVIC结构体初始化
3.使能TIM4时钟,挂接在APB1上
4.定时器预分频器,周期,技术模式,时钟分频,初始变量及结构地址
5.TIM_ITConfig,清除标志
6.NVIC的设置, TIM_Cmd(TIM4,ENABLE);
7.TIM4_IRQHandler函数,if语句判断状态if(TIM_GetITStatus(TIM4,TIM_IT_Update)==1)
8.清除标志,TIM_ClearITPendingBit(TIM4,TIM_IT_Update);
time.h
#ifndef _time_H
#define _time_H
#include "system.h"
void TIM4_Init(u16 pre,u16 psc);
#endif
总结:注意包含头文件#include "system.h",初始化函数
main.c
#include "system.h"
#include "led.h"
#include "SysTick.h"
#include "time.h"
int main()
{
u8 i=0;
SysTick_Init(72);//72M
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
LED_Init();//初始化
TIM4_Init(1000,36000-1);//500ms定时器时间
while(1) //可以检测是否死机
{
i++;
if(i%20==0)
{
led1=!led1; //led1不断闪烁
}
delay_ms(10);
}
}