摄像头模组,全称CameraCompact Module,简写为CCM。CCM 包含四大件: 镜头(lens)、传感器(sensor)、软板(FPC)、图像处理芯片(DSP)。决定一个摄像头好坏的重要部件是:镜头(lens)、图像处理芯片 (DSP)、传感器(sensor)。CCM的关键技术为:光学设计技术、非球面镜制作技术、光学镀膜技术。
工作原理:物体通过镜头(lens)聚集的光,通过CMOS或CCD集成电路,把光信号转换成电信号,再经过内部图像处理器(ISP)转换成数字图像信号输出到数字信号处理器(DSP)加工处理,转换成标准的GRB、YUV等格式图像信号。
LENS部分
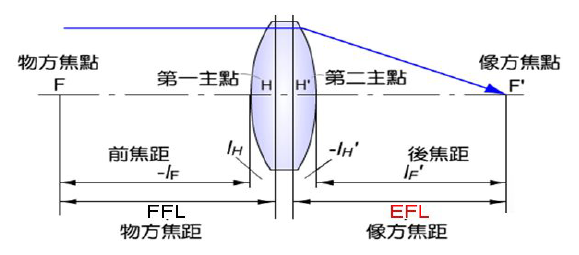
EFL:effective focal length 有效焦距,就是透镜系统中心到成像焦点的距离
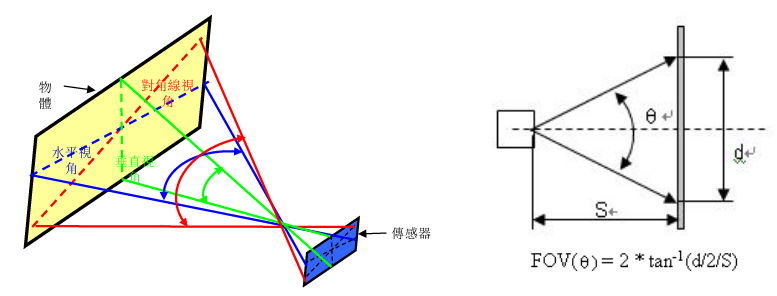
FOV:field of view 视场角,就是镜头能拍摄到的最大事业范围,指对角线视角。视场角分为垂直、水平和对角线三种
F/NO:F-number 焦数,即有效焦距(EFL)与入射瞳孔直径(EPD)的比值,F/NO=EFL /EPD
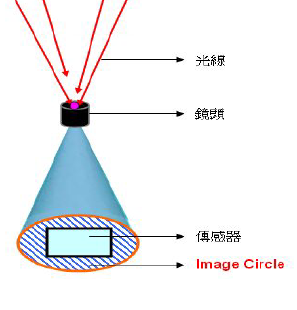
Image Circle:像素圈,指光学系统所成像的最大区域。
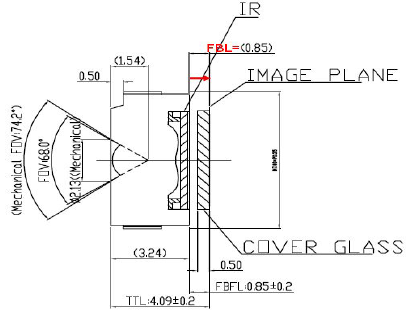
TTL:total track length 镜头总高,总高分为光学及机构,一般在光学式样中为光学TTL,在镜头圆面中为机构TTL,光学TTL为从光学系统的第一片镜片至成像面的长度,如下图红色箭头长度,机构TTL为从Barrel顶端至成像面的长度,如下图蓝色箭头长度。
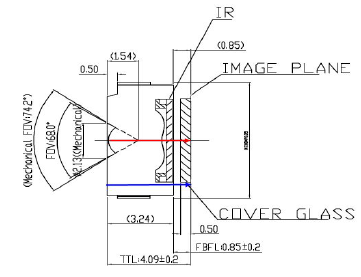
BFL:back flange length 后焦,指镜头最后端至成像面的长度,如下图红色箭头长度
lllumination: 相对照度,指物体或被照面上被光源照射所呈现的光亮程度,称为照度。相对照度为中心照度与周边照度比值。 RI=边缘照度/中心照度*100%。
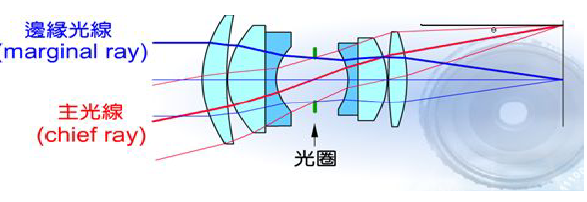
CRA:chief ray angel 主光线角度。就是光线由物的边缘出射,通过孔径光栏的中心最后到达像的边缘,图中红色的线就是主光线,主光线角度为主光线与平行光线的角度。
Sensor部分
对于现在来说,sensor主要分为两类,一类是CMOS,一类是CCD,
CMOS:Complementary Metal Oxide Semiconductor(互补金属氧化物半导体)分辨率在同像素下比CCD要低,噪音要多,工艺简单,成本低,外围集成度高,大部分厂商使用
CCD:Charge-coupled Device 电荷耦合元件,工艺较复杂,成本高,成像更佳,只有少数厂商掌握
而且现在CMOS是一个趋势。对于镜头来讲,一个镜头只能适用于一种传感器,且一般镜头的尺寸应该和sensor的尺寸一致。
Sensor按工艺分类有两种:CSP&COB:
CSP:chip scale package(sensor底部锡球通过锡膏与FPC开创PAD接触连接)
优点:模组工艺简单,particle容易控制,生产良率高;
缺点:在成像区表面有cover glass层,增加了sensor本身成本,成本高。
COB:chip on board(通过胶使sensor与FPC相接触)
优点:产品光透性相对较好,模组厚度相对较低,对lens后要求小;
缺点:模组厂商设备投入大,制程复杂,良率较难控制(尤其是POD&POG)。
POD:particle on die 模具上的粒子,污点,sensor传感器上;
POG:particle on glass 镜片上的粒子,大的脏的区域,在lens镜头上;
OC:off center 偏离重心,组装,x,y坐标轴;
RI:黑场白场,中心与四周的对比;
OPT:one time programable 一次性编译, 一次烧录。
COC:circle of confusion 模糊圈(弥散圈),一般情况下,COC的尺寸为sensor像素大小的两倍
DOF:depth of focus 景深,有位置和大小,位置即对焦点(被摄主体)的位置,大小即对焦点附近清晰范围的大小,景深的大小与lens的焦距、光圈;以及sensor的plxel size有关。
MTF/SFR:modulation transfer function (调制传递函数)解析度力,黑白线,比如13m=1300xp,做到要求20m
在车间单独拍照,每个料拍三张,分别是center 4:3~4:3 ;left 16:1~1:1 ;right 1:1~16:1
AF:auto focus 自动对焦
FF:fixed focus 定焦镜头
MF:Micro focus 两档变焦摄像头
PDAF:Phase Detection Auto Focus 相位检测自动对焦
AE:automatic exposure 自动曝光
SPC:shield pixel correction 掩蔽像素校正
DCC:defocus conversion coefficient 离焦转换系数
CDAF:contrast detection focus 反差对焦
AWB:automatic white balance 自动白平衡,通过图像调整,是在各种光线条件下拍摄出的照片色彩和人眼所看到的景物色彩完全相同。
SFR:spatial frequency response 主要是用于测量随着空间频率的线条增加对单一影像的所造成影响。简言之SFR是MTF的另一种测试方法,这种测试方法在很大程度上精简了测试流程。SFR的最终计算是希望得到MTF曲线,SFR的计算方法和MTF虽然不同但是在结果上是基本一致的。
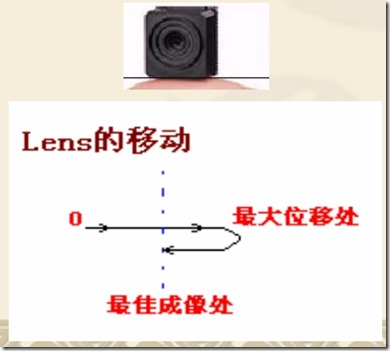
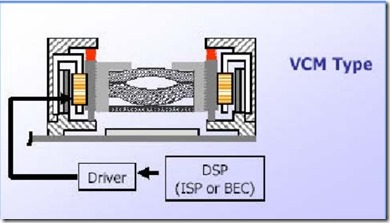
变焦马达:
VCM:voice coil motor音圈马达(常用)
SM:stepping motor 步进马达
PM:piezoelectric motor 压电马达
中置马达与普通马达对比
1)模组上电后,中置马达自动位于中间(code=512)位置,可以保证PDAF过程中马达能够位于线性区域,确保PDAF的准确性。
2)普通马达在大步幅跳变时,DLC模式下,稳定性差,无法实现快速对焦,不适合PDAF。
3)在姿势差方面,中置马达比普通马达相对差一点,一致性较差,对两个中置方案分别测试32PCS模组,不同的中置马达姿势差存在较大差异。
DLC模式。
CloseLoop 闭环马达
优点:
1)由于霍尔元器件的存在,能够消除马达迟滞对PDAF校准的影响,马达的一致性最好。
2)马达的稳定时间快于中置马达。
缺点:
1)价格比别的中置马达和普通马达更加贵。
driver IC
1)开环式driver IC
2)闭环式driver IC