chapter 1 介绍
什么是规划?
在机器人领域,运动规划和轨迹规划主要用来解决“怎么移动钢琴”的问题,这个问题是如何将钢琴从一个房间移动到另一个房间,并且保证钢琴不和其他事物发生碰撞。

在控制领域,运动规划主要指求解非线性动态系统的一组输入,驱使该系统从一种初始状态到达一种指定的目标状态。比如如何远程遥控气垫船,驱使它从当前的停靠点行驶到另一指定的地点。
在人工智能领域,AI 规划更侧重于离散空间的问题。比如为了解决拼图问题,规划需要输出一系列的动作序列。
规划问题的应用场景
-
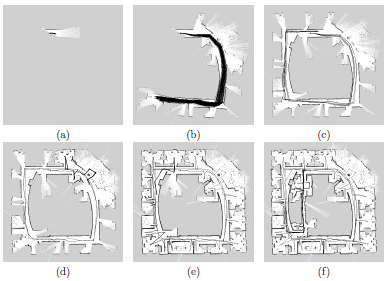
slam
-
自动泊车

-
高速下的自动驾驶

规划问题的基本组成
- 状态空间
- 时间
- 动作
- 初始和目标状态
- 评定标准
可达性和最优性 - 计划(策略)