Ceres Solver: 高效的非线性优化库(二)实战篇
接上篇: Ceres Solver: 高效的非线性优化库(一)
如何求导
Ceres Solver提供了一种自动求导的方案,上一篇我们已经看到。
但有些情况,不能使用自动求导方案。另外两种方案:解析求导和数值求导。
1. 解析求导
有些情况无法定义模板代价函数。比如残差函数是库函数,你无法知道。此时我们可以构建一个NumericDiffCostFunction,例如$$f(x)=10-x$$.上面的例子变成
struct NumericDiffCostFunctor {
bool operator()(const double* const x, double* residual) const {
residual[0] = 10.0 - x[0];
return true;
}};
加入Problem中。
CostFunction* cost_function =
new NumericDiffCostFunction<NumericDiffCostFunctor, ceres::CENTRAL, 1, 1>(
new NumericDiffCostFunctor);
problem.AddResidualBlock(cost_function, NULL, &x);
同自动求导的区别
CostFunction* cost_function =
new AutoDiffCostFunction<CostFunctor, 1, 1>(new CostFunctor);problem.AddResidualBlock(cost_function, NULL, &x);
一般而言,我们推荐自动求导,不适用数值求导。C++模板让自动求导非常高效,但解析求导速度很慢,且容易造成数值错误,收敛较慢。
2. 数值求导
有些情况,自动求导并不能使用。比如,有时候使用最终形势比自动求导的链式法则(chain rule)更方便。
这种情况下,需要提供残差和雅克比值。为此,我们需要定义一个CostFunction的子类(如果你知道残差在编译时的大小,可定义SizedCostFunction的子类)。下面依旧是(f(x) = 10 - x)的例子。
class QuadraticCostFunction : public ceres::SizedCostFunction<1, 1> {
public:
virtual ~QuadraticCostFunction() {}
virtual bool Evaluate(double const* const* parameters,
double* residuals,
double** jacobians) const {
const double x = parameters[0][0];
residuals[0] = 10 - x;
// Compute the Jacobian if asked for.
if (jacobians != NULL && jacobians[0] != NULL) {
jacobians[0][0] = -1;
}
return true;
}};
SimpleCostFunction::Evaluate是输入参数,residuals是jacobian的输出。Jacobians是可选项,Evaluate用来检测它是否非空,否则帮它填充好。此示例下残差是线性的,雅克比是固定值。
这个方案是比较繁琐的。除非有必要,推荐使用AutoDiffCostFunction或NumericDiffCostFunction来创建。
3. 更多关于求导的内容
求导是目前Ceres Solver最复杂的内容,有时候用户需要根据情况旋转更方便的方案。本节只是大致介绍求导方案。熟悉Numeric和Auto之后,推荐了解DynamicAuto,CostFunctionToFunctor,NumericDiffFunctor和ConditionedCostFunction。
实战之Powell’s Function(一个稍微复杂点的例子)
考虑变量$$x = left[x_1, x_2, x_3, x_4 ight]$$和
$ F(x) (是4个参数的函数,有4个残差,我们希望找到一个最小化)frac{1}{2}|F(x)|^2(的变量)x(。第一步,定义一个衡量目标函数的算子。对于)f_4(x_1, x_4)$:
struct F4 {
template <typename T>
bool operator()(const T* const x1, const T* const x4, T* residual) const {
residual[0] = T(sqrt(10.0)) * (x1[0] - x4[0]) * (x1[0] - x4[0]);
return true;
}
};
类似的我们可以定义F1,F2,F3。利用这些算子,优化问题可使用下面的方法解决:
double x1 = 3.0; double x2 = -1.0; double x3 = 0.0; double x4 = 1.0;
Problem problem;
// Add residual terms to the problem using the using the autodiff
// wrapper to get the derivatives automatically.
problem.AddResidualBlock(
new AutoDiffCostFunction<F1, 1, 1, 1>(new F1), NULL, &x1, &x2);
problem.AddResidualBlock(
new AutoDiffCostFunction<F2, 1, 1, 1>(new F2), NULL, &x3, &x4);
problem.AddResidualBlock(
new AutoDiffCostFunction<F3, 1, 1, 1>(new F3), NULL, &x2, &x3)
problem.AddResidualBlock(
new AutoDiffCostFunction<F4, 1, 1, 1>(new F4), NULL, &x1, &x4);
对于每个ResidualBlock仅仅依赖2个变量。运行examples/powell.cc可以得到相应优化结果。
Initial x1 = 3, x2 = -1, x3 = 0, x4 = 1
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 1.075000e+02 0.00e+00 1.55e+02 0.00e+00 0.00e+00 1.00e+04 0 4.95e-04 2.30e-03
1 5.036190e+00 1.02e+02 2.00e+01 2.16e+00 9.53e-01 3.00e+04 1 4.39e-05 2.40e-03
2 3.148168e-01 4.72e+00 2.50e+00 6.23e-01 9.37e-01 9.00e+04 1 9.06e-06 2.43e-03
3 1.967760e-02 2.95e-01 3.13e-01 3.08e-01 9.37e-01 2.70e+05 1 8.11e-06 2.45e-03
4 1.229900e-03 1.84e-02 3.91e-02 1.54e-01 9.37e-01 8.10e+05 1 6.91e-06 2.48e-03
5 7.687123e-05 1.15e-03 4.89e-03 7.69e-02 9.37e-01 2.43e+06 1 7.87e-06 2.50e-03
6 4.804625e-06 7.21e-05 6.11e-04 3.85e-02 9.37e-01 7.29e+06 1 5.96e-06 2.52e-03
7 3.003028e-07 4.50e-06 7.64e-05 1.92e-02 9.37e-01 2.19e+07 1 5.96e-06 2.55e-03
8 1.877006e-08 2.82e-07 9.54e-06 9.62e-03 9.37e-01 6.56e+07 1 5.96e-06 2.57e-03
9 1.173223e-09 1.76e-08 1.19e-06 4.81e-03 9.37e-01 1.97e+08 1 7.87e-06 2.60e-03
10 7.333425e-11 1.10e-09 1.49e-07 2.40e-03 9.37e-01 5.90e+08 1 6.20e-06 2.63e-03
11 4.584044e-12 6.88e-11 1.86e-08 1.20e-03 9.37e-01 1.77e+09 1 6.91e-06 2.65e-03
12 2.865573e-13 4.30e-12 2.33e-09 6.02e-04 9.37e-01 5.31e+09 1 5.96e-06 2.67e-03
13 1.791438e-14 2.69e-13 2.91e-10 3.01e-04 9.37e-01 1.59e+10 1 7.15e-06 2.69e-03
Ceres Solver v1.12.0 Solve Report
----------------------------------
Original Reduced
Parameter blocks 4 4
Parameters 4 4
Residual blocks 4 4
Residual 4 4
Minimizer TRUST_REGION
Dense linear algebra library EIGEN
Trust region strategy LEVENBERG_MARQUARDT
Given Used
Linear solver DENSE_QR DENSE_QR
Threads 1 1
Linear solver threads 1 1
Cost:
Initial 1.075000e+02
Final 1.791438e-14
Change 1.075000e+02
Minimizer iterations 14
Successful steps 14
Unsuccessful steps 0
Time (in seconds):
Preprocessor 0.002
Residual evaluation 0.000
Jacobian evaluation 0.000
Linear solver 0.000
Minimizer 0.001
Postprocessor 0.000
Total 0.005
Termination: CONVERGENCE (Gradient tolerance reached. Gradient max norm: 3.642190e-11 <= 1.000000e-10)
Final x1 = 0.000292189, x2 = -2.92189e-05, x3 = 4.79511e-05, x4 = 4.79511e-05
实战之曲线拟合
之前的例子都是不依赖数据的简单例子。非线性最小二乘法分析最初的目标是把数据拟合称曲线。现在考虑曲线拟合的数据,公式为(y = e^{0.3x + 0.1})。对其进行采样并加入方差为(sigma = 0.2)高斯噪声。我们希望拟合曲线
首先我们定义一个模板对象来评估残差。
struct ExponentialResidual {
ExponentialResidual(double x, double y)
: x_(x), y_(y) {}
template <typename T>
bool operator()(const T* const m, const T* const c, T* residual) const {
residual[0] = T(y_) - exp(m[0] * T(x_) + c[0]);
return true;
}
private:
// Observations for a sample.
const double x_;
const double y_;
};
假设我们有观测数据(2n)大小,构建如下问题。
double m = 0.0;
double c = 0.0;
Problem problem;
for (int i = 0; i < kNumObservations; ++i) {
CostFunction* cost_function =
new AutoDiffCostFunction<ExponentialResidual, 1, 1, 1>(
new ExponentialResidual(data[2 * i], data[2 * i + 1]));
problem.AddResidualBlock(cost_function, NULL, &m, &c);
}
变异运行examples/curve_fitting.cc得到相应结果。
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 1.211734e+02 0.00e+00 3.61e+02 0.00e+00 0.00e+00 1.00e+04 0 5.34e-04 2.56e-03
1 1.211734e+02 -2.21e+03 0.00e+00 7.52e-01 -1.87e+01 5.00e+03 1 4.29e-05 3.25e-03
2 1.211734e+02 -2.21e+03 0.00e+00 7.51e-01 -1.86e+01 1.25e+03 1 1.10e-05 3.28e-03
3 1.211734e+02 -2.19e+03 0.00e+00 7.48e-01 -1.85e+01 1.56e+02 1 1.41e-05 3.31e-03
4 1.211734e+02 -2.02e+03 0.00e+00 7.22e-01 -1.70e+01 9.77e+00 1 1.00e-05 3.34e-03
5 1.211734e+02 -7.34e+02 0.00e+00 5.78e-01 -6.32e+00 3.05e-01 1 1.00e-05 3.36e-03
6 3.306595e+01 8.81e+01 4.10e+02 3.18e-01 1.37e+00 9.16e-01 1 2.79e-05 3.41e-03
7 6.426770e+00 2.66e+01 1.81e+02 1.29e-01 1.10e+00 2.75e+00 1 2.10e-05 3.45e-03
8 3.344546e+00 3.08e+00 5.51e+01 3.05e-02 1.03e+00 8.24e+00 1 2.10e-05 3.48e-03
9 1.987485e+00 1.36e+00 2.33e+01 8.87e-02 9.94e-01 2.47e+01 1 2.10e-05 3.52e-03
10 1.211585e+00 7.76e-01 8.22e+00 1.05e-01 9.89e-01 7.42e+01 1 2.10e-05 3.56e-03
11 1.063265e+00 1.48e-01 1.44e+00 6.06e-02 9.97e-01 2.22e+02 1 2.60e-05 3.61e-03
12 1.056795e+00 6.47e-03 1.18e-01 1.47e-02 1.00e+00 6.67e+02 1 2.10e-05 3.64e-03
13 1.056751e+00 4.39e-05 3.79e-03 1.28e-03 1.00e+00 2.00e+03 1 2.10e-05 3.68e-03
Ceres Solver Report: Iterations: 13, Initial cost: 1.211734e+02, Final cost: 1.056751e+00, Termination: CONVERGENCE
Initial m: 0 c: 0
Final m: 0.291861 c: 0.131439
使用初值(m=0, c=0), 初始目标函数值为(121.173)。Ceres计算得到(m=0.291, c=0.131).目标函数值为(1.056)。但这同原始模型不一样,但也是合理的。通过带噪声的数据恢复模型会得到一定的偏差。实际上,即使使用原始模型数据,偏差更大。

实战之曲线鲁棒拟合
现在假设数据有一些我们并不在模型的值。如果使用这些做拟合,模型会离真实值有所偏差。如下图。
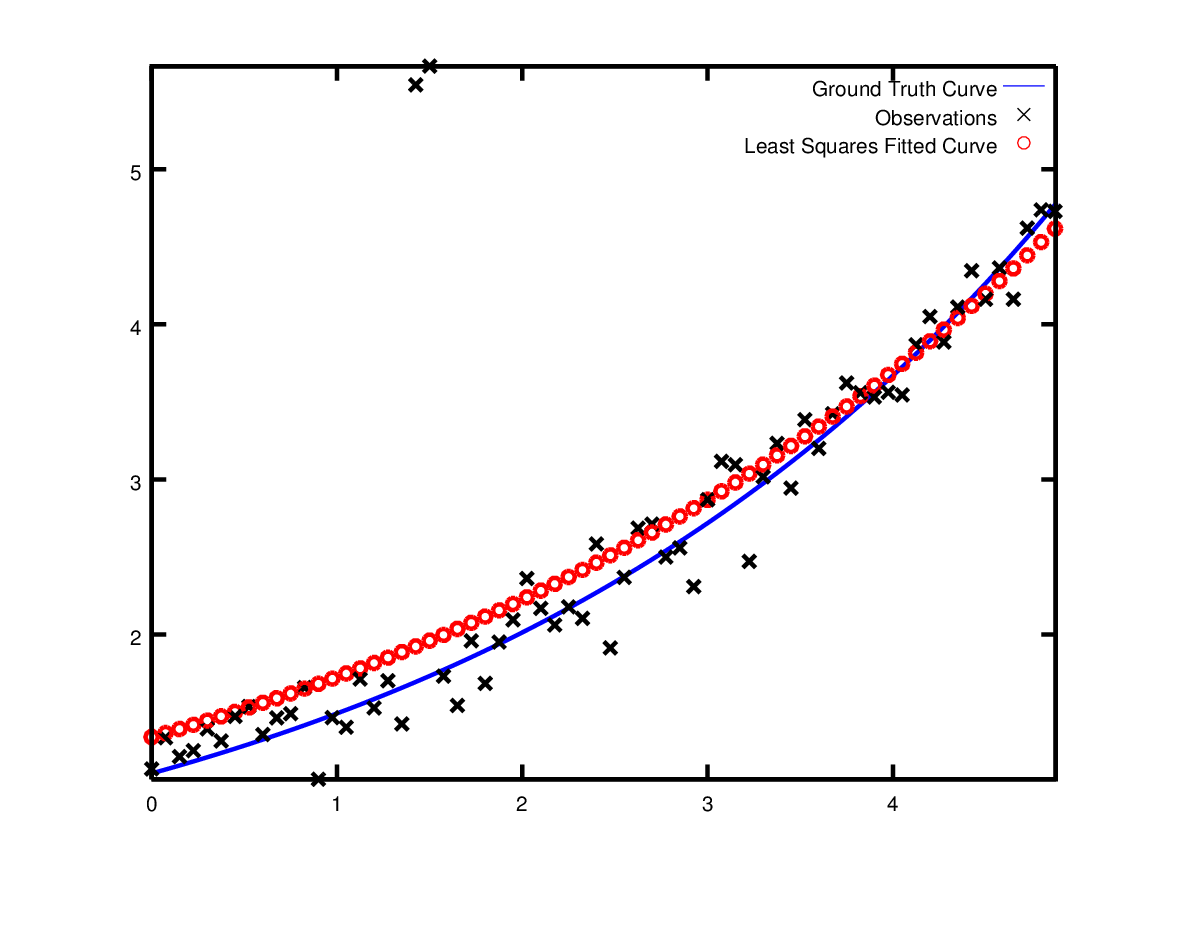
为了处理这些噪点,一个技巧是使用LossFunction。此函数减小大偏差对整个残差模块的影响。大偏差经常属于Outliers。加入残差函数,我们修要做修改
problem.AddResidualBlock(cost_function, NULL , &m, &c);
改为
problem.AddResidualBlock(cost_function, new CauchyLoss(0.5) , &m, &c);
CauchyLoss是Ceres Solver发明的损失函数之一。0.5是损失函数的尺度。加入损失函数后,我们获得更好的拟合结果。

下一篇文章里,我们重点介绍Ceres是计算机三维视觉里的重要应用:光束平差法(Bundle Adjustment),一般简称BA。