2017.7.28 补充:
1、在IMU程序当中,IMU作为服务器端,向外广播。我们可以在特定的端口上面读到数据。
2、但是,我一直没搞明白就是 udp::sock 的作用,他是可以作为 初始化 赋值来使用的。
也就是说,他可以作为 一个变量来使用。
如下:
udp::socket* UDPServer::psocket = NULL;
UDPServer::UDPServer(boost::asio::io_service &ios, int port) :
socket(ios, udp::endpoint(udp::v4(), port)) {
psocket = &socket;
listen();
}
参考资料: http://blog.csdn.net/liujiayu2/article/details/50895384
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
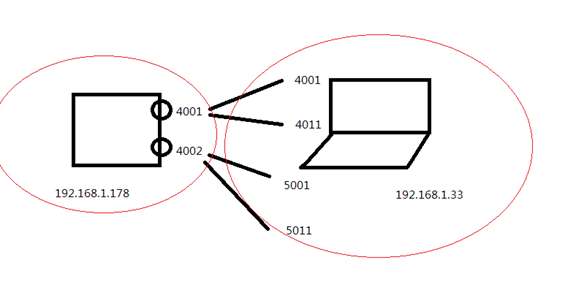
注意一点:当我们不同PC机间进行通信的时候,IP和端口号是不一样的。之前遇到的问题是,boost_system_error,这是因为我们在写程序的时候,发送和接收绑定了同一个端口,导致程序出错。
而且,CANET支持组播通信,也就是说,一个通道可以同时向多个端口发送数据。
之前一直搞错的原因就是端口重复绑定了,导致错误。
-
/*
-
* Copyright (c) 2015,北京智行者科技有限公司
-
* All rights reserved.
-
*
-
* 文件名称:Boost_UDP.h
-
* 文件标识:见软件框架协议
-
* 摘 要:UDP读写类
-
*
-
* 当前版本:1.0
-
* 作 者:zhuxuekui
-
* 完成日期:2015年11月30日
-
* 修 改:
-
*
-
* 取代版本:1.0
-
* 原作者 :zhuxuekui
-
* 完成日期:2015年11月30日
-
*/
-
-
#ifndef BOOST_UDP_H
-
#define BOOST_UDP_H
-
-
#include "Utils.h"
-
-
using namespace boost;
-
-
#define RECVSIZE 1024
-
class Boost_UDP
-
{
-
public:
-
-
Boost_UDP(boost::asio::io_service &io_service,string pcIP, int pcPort, string canetIP, int canetPort):udp_sock(io_service)
-
{
-
m_canetIP = canetIP;
-
m_canetPort = canetPort;
-
m_pcIP = pcIP;
-
m_pcPort = pcPort;
-
}
-
-
~Boost_UDP()
-
{
-
udp_sock.close();
-
}
-
-
//开始socket,绑定端口等。 绑定PC机端口号,而且还不能用 127.0.0.1, 不然会出错,很奇怪的原因。
-
void start_sock()
-
{
-
// here the ip can change to 192.168.1.33
-
boost::asio::ip::udp::endpoint local_add(boost::asio::ip::address_v4::from_string(m_pcIP),m_pcPort);
-
udp_sock.open(local_add.protocol());
-
udp_sock.bind(local_add);
-
}
-
-
//收数据
-
int receive_data(unsigned char buf[])
-
{
-
boost::mutex::scoped_lock lock(mutex);
-
//donot change 目的端口与发送端口现在是不一样的
-
boost::asio::ip::udp::endpoint send_endpoint(boost::asio::ip::address_v4::from_string(m_pcIP),m_pcPort); //这里的endpoint是PC机的IP和端口号
-
int ret = udp_sock.receive_from(boost::asio::buffer(buf,RECVSIZE),send_endpoint);//堵塞模式
-
return ret;
-
}
-
-
//发送数据
-
int send_data(unsigned char str[], int len)
-
{
-
boost::mutex::scoped_lock lock(mutex);
-
//donot change
-
boost::asio::ip::udp::endpoint send_endpoint(boost::asio::ip::address_v4::from_string(m_canetIP),m_canetPort); //canet的IP和端口号
-
int ret = udp_sock.send_to(boost::asio::buffer(str,len),send_endpoint);
-
return ret;
-
}
-
public:
-
-
string m_canetIP;
-
int m_canetPort;
-
string m_pcIP;
-
int m_pcPort;
-
-
boost::asio::ip::udp::socket udp_sock;
-
mutable boost::mutex mutex;
-
-
};
-
-
-
#endif