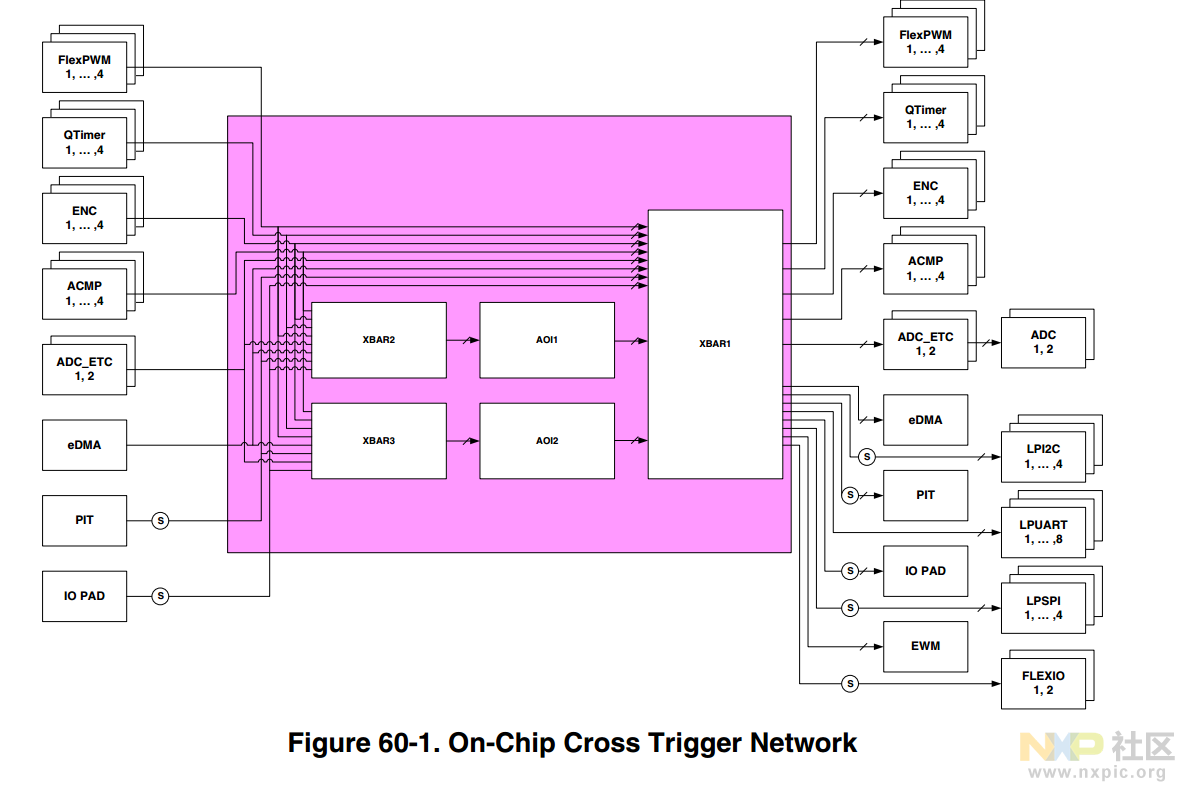
这个 XBAR 是一个网络式的连接线路。首先可以让我们的引脚配置更加灵活多变,另一方面,可以拿它来玩很多很秀的操作。可以把它理解为一根导线,可以自由的连接各个模块的输入和输出
先来个框图
<ignore_js_op>
先上一个简单的程序
引脚初始化部分
- IOMUXC_SetPinMux(IOMUXC_GPIO_AD_B0_02_XBAR1_INOUT16,0); //复用为XBAR功能
- IOMUXC_SetPinConfig(IOMUXC_GPIO_AD_B0_02_XBAR1_INOUT16, IOMUXC_SW_PAD_CTL_PAD_SRE(0) //转换速率慢
- |IOMUXC_SW_PAD_CTL_PAD_DSE(6) //驱动强度R0/6
- |IOMUXC_SW_PAD_CTL_PAD_SPEED(2) //速度100MHz
- |IOMUXC_SW_PAD_CTL_PAD_ODE(0) //关闭开漏
- |IOMUXC_SW_PAD_CTL_PAD_PKE(1) //拉/保持器开启
- |IOMUXC_SW_PAD_CTL_PAD_PUE(0) //选择为保持
- |IOMUXC_SW_PAD_CTL_PAD_PUS(0) //100K下拉
- |IOMUXC_SW_PAD_CTL_PAD_HYS(0)); //关闭滞回
- #include "fsl_device_registers.h"
- #include "fsl_debug_console.h"
- #include "board.h"
- #include "pin_mux.h"
- #include "clock_config.h"
- #include "fsl_lpuart.h"
- #include "fsl_pwm.h"
- #include "fsl_xbara.h"
- #include "delay.h"
- #define DISPLAY_CLK(name) (PRINTF("%s:%d\r\n",#name,CLOCK_GetFreq(name))) //打印对应时钟
- int main(void)
- {
- BOARD_ConfigMPU();
- BOARD_InitPins();
- BOARD_BootClockRUN();
- BOARD_InitDebugConsole();
- XBARA_Init(XBARA1); //初始化XBARA1
- IOMUXC_GPR->GPR6|=1<<28; //设置IO16为输出模式
- XBARA_SetSignalsConnection(XBARA1,kXBARA1_InputLogicLow,kXBARA1_OutputIomuxXbarInout16);
- while (1)
- {
- }
- }
引脚初始化部分,把底板上小灯的引脚配置为了 IOMUXC_GPIO_AD_B0_02_XBAR1_INOUT16 功能(小灯引脚位置可见飞凌RT1052——4.GPIO与外部中断https://www.nxpic.org.cn/module/foru ... 161&fromuid=3469866(出处: 恩智浦技术社区))
然后主程序,先配置XBARA_Init(XBARA1);没啥好说的,XBAR一共XBARA1、XBARB2、XBARB3三块,这里只用到了XBARA1
然后IOMUXC_GPR->GPR6|=1<<28;就比较有意思了
<ignore_js_op>
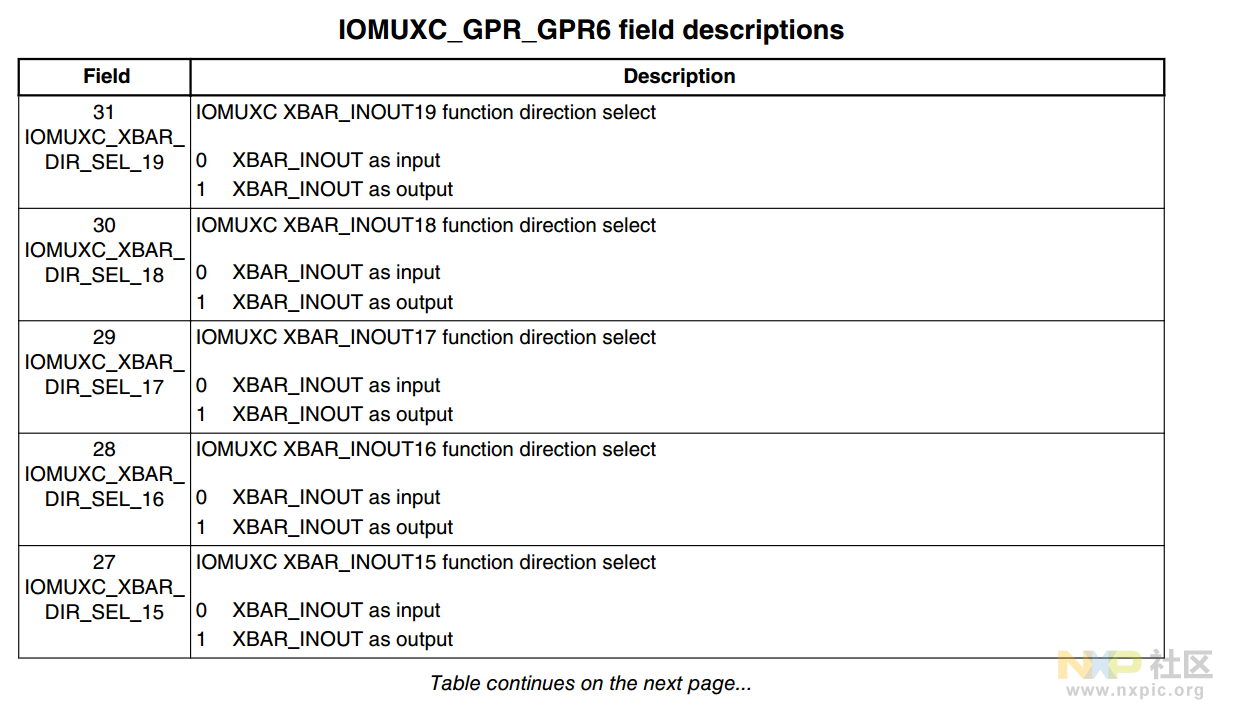
由图可以看到配置第28位为1的话,就能使IOMUXC_XBAR_DIR_SEL_16为输出模式(只有4—19一共16个IOMUXC_XBAR(我还找了好久的0 1 2 3,发现并没有。。))。
最后看一下XBARA_SetSignalsConnection函数
void XBARA_SetSignalsConnection(XBARA_Type *base, xbar_input_signal_t input, xbar_output_signal_t output);
一共由三个参数,第一个是模块名,第二个是输入的信号,第三个是输出的信号
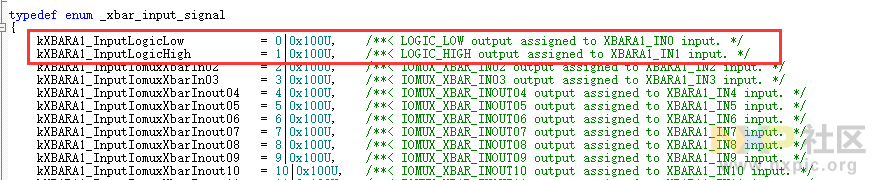
xbar_input_signal_t(部分)
<ignore_js_op>
xbar_output_signal_t(部分)
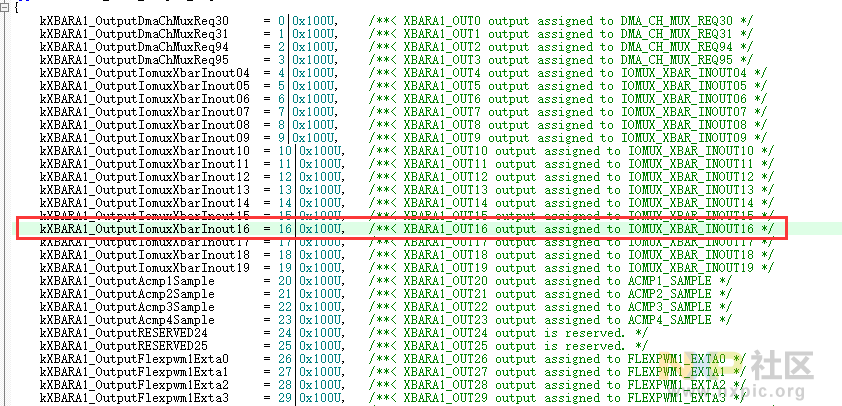
这次选择的输入为kXBARA1_InputLogicLow(低电平信号,就是相当于接了个低电平进去),输出是 kXBARA1_OutputIomuxXbarInout16 引脚。
实验结果,可以看到小灯亮了(该灯为反逻辑)
然后修改一下程序
XBARA_SetSignalsConnection(XBARA1,kXBARA1_InputLogicHigh,kXBARA1_OutputIomuxXbarInout16);
输入一个高电平
实验结果,可以看到小灯灭了
接下来,上呼吸灯的程序
- #include "fsl_device_registers.h"
- #include "fsl_debug_console.h"
- #include "board.h"
- #include "pin_mux.h"
- #include "clock_config.h"
- #include "fsl_lpuart.h"
- #include "fsl_pwm.h"
- #include "fsl_xbara.h"
- #include "delay.h"
- #define DISPLAY_CLK(name) (PRINTF("%s:%d\r\n",#name,CLOCK_GetFreq(name))) //打印对应时钟
- int main(void)
- {
- uint8_t pwmVal = 0;
- pwm_signal_param_t pwmSignal[1];
- pwm_config_t pwmConfig;
- BOARD_ConfigMPU();
- BOARD_InitPins();
- BOARD_BootClockRUN();
- BOARD_InitDebugConsole();
- delay_init(); //初始化延时
- DISPLAY_CLK(kCLOCK_AhbClk);
- DISPLAY_CLK(kCLOCK_IpgClk);
- XBARA_Init(XBARA1); //初始化XBARA1
- IOMUXC_GPR->GPR6|=1<<28; //设置IO16为输出模式
- /* PWM1PWM4OUTTrig01作为输入,IO16作为输出 */
- XBARA_SetSignalsConnection(XBARA1,kXBARA1_InputFlexpwm1Pwm4OutTrig01,kXBARA1_OutputIomuxXbarInout16);
- PWM1->SM[3].TCTRL |= PWM_TCTRL_PWAOT0_MASK; //配置PWM1通道3PWMA映射到Flexpwm1Pwm4OutTrig01
- PWM1->SM[3].DISMAP[0]=0;
- PWM_GetDefaultConfig(&pwmConfig); //快速配置
- pwmConfig.reloadLogic = kPWM_ReloadPwmFullCycle; //全周期更新
- pwmConfig.pairOperation = kPWM_Independent; //PWMA,PWMB各自独立输出
- PWM_Init(PWM1, kPWM_Module_3, &pwmConfig); //初始化PWM1的通道3
- pwmSignal[0].pwmChannel = kPWM_PwmA; //配置PWMA
- pwmSignal[0].level = kPWM_HighTrue; //有效电平为高
- pwmSignal[0].dutyCyclePercent = 50; //占空比50%
- /*配置PWM1 通道3 有符号中心对齐 PWM信号频率为1000Hz*/
- PWM_SetupPwm(PWM1, kPWM_Module_3, pwmSignal, 1, kPWM_SignedCenterAligned, 1000, CLOCK_GetFreq(kCLOCK_IpgClk));
- PWM_SetPwmLdok(PWM1, kPWM_Control_Module_3, true); //更新有关设置
- PWM_StartTimer(PWM1, kPWM_Control_Module_3); //开始计数
- while (1)
- {
- delay_ms(10);
- pwmVal = pwmVal + 1;
- if (pwmVal >= 200)
- {
- pwmVal = 0;
- }
- PWM_UpdatePwmDutycycle(PWM1,kPWM_Module_3, kPWM_PwmA, kPWM_SignedCenterAligned, ((pwmVal>100)?(200-pwmVal):pwmVal)); //更新占空比
- PWM_SetPwmLdok(PWM1, kPWM_Control_Module_3, true); //更新有关设置
- }
- }
关键就是
XBARA_SetSignalsConnection(XBARA1,kXBARA1_InputFlexpwm1Pwm4OutTrig01,kXBARA1_OutputIomuxXbarInout16);
PWM1->SM[3].TCTRL |= PWM_TCTRL_PWAOT0_MASK; //配置PWM1通道3PWMA映射到Flexpwm1Pwm4OutTrig01
这两句,其他和刚才提到的和上一个贴子(飞凌RT1052——10.FlexPWM输出https://www.nxpic.org.cn/module/foru ... 263&fromuid=3469866(出处: 恩智浦技术社区))程序一模一样(其实在输出部分也有一定的改动,见while(1)里面,不过寄存器的配置没有改动,就不提了,有兴趣可以看一下)
首先是kXBARA1_InputFlexpwm1Pwm4OutTrig01
<ignore_js_op>
可以看出来这是 FLEXPWM1_PWM4_OUT_TRIG0_1(吐槽,之前标注通道的方式是0~3,到这里突然变成1~4了,害我懵逼了好久)
很好理解这是PWM1模块的通道3,可这TRIG0_1是个什么玩意,我们知道,PWM的一个通道又分为PWMA、PWMB、PWMX三个输出的。
查了一下,发现了一个这玩意
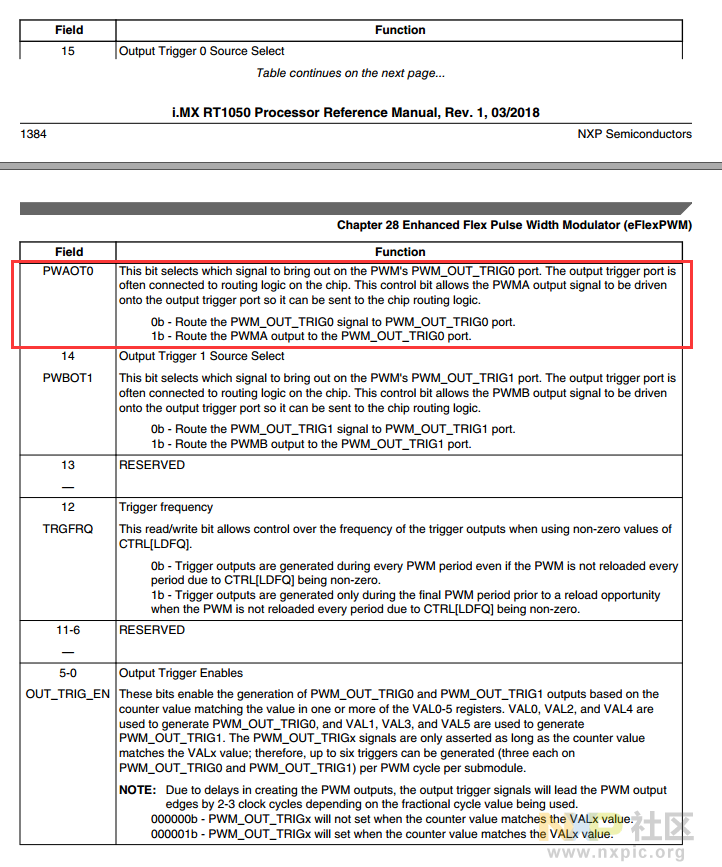
这里,就可以设置TRIG0_1的来源与产生方式,这次要用的就是利用PWMA通道去映射到IO16,所以,我们只需要把PWAOT0置1就好了。(还能设置PWMB或者自己配置比较输出,就不提了)
PWM1->SM[3].TCTRL |= PWM_TCTRL_PWAOT0_MASK; 就好了。
在用FLEXPWM2映射到PWMX上时,注意
PWM2->SM[3].VAL0 = (PWM2->SM[3].VAL1)/4;
PWM2->OUTEN |= ((uint16_t)1U << 3);
这两句话