runxinzhi.com
首页
百度搜索
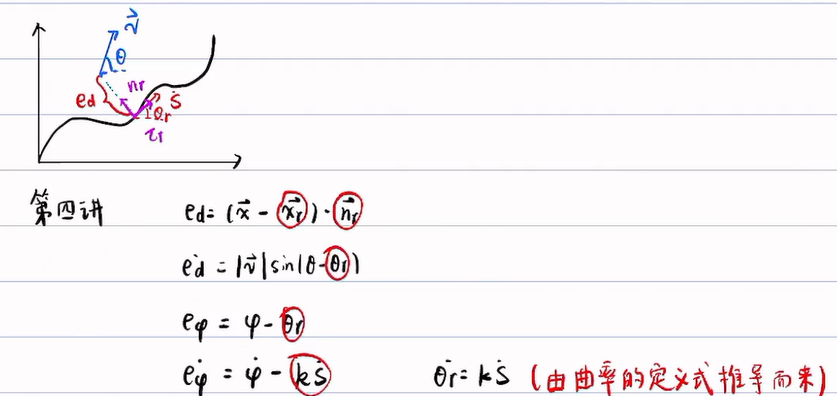
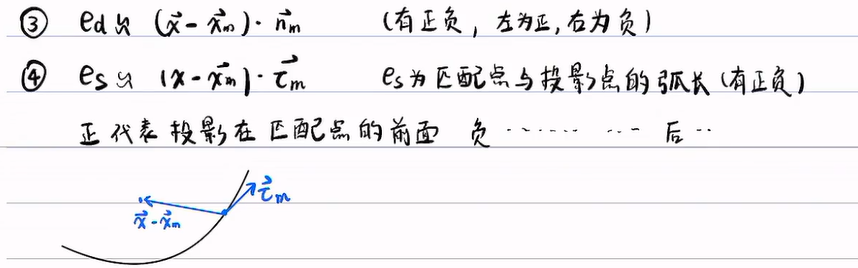
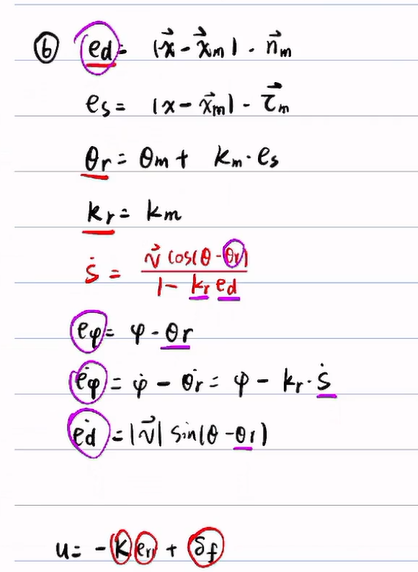
自动驾驶控制算法第七讲 离散规划轨迹的误差计算
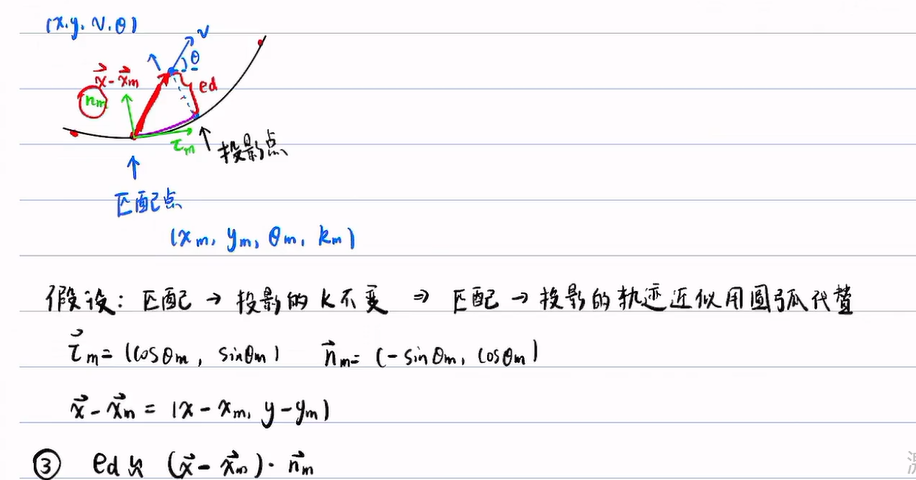
ed约等于这块使用的高中求投影公式(x向量 - xr向量)点乘 nm向量 除以nm的模长,就是x向量 - xr向量在nm方向上的投影,nm向量为单位向量所以nm的模长为1
相关阅读:
Android Studio快速导入项目
梦断代码阅读笔记01
Python词云生成
Python 数据处理
Android studio 自定义Dialog
Android studio Activity的跳转和数据传递
Android studio Handler消息处理2
2.9 react组件中使用key作为prop属性命名报错
2.3 上下margin值合并
2.2 快速认识虚拟dom
原文地址:https://www.cnblogs.com/zhj868/p/14288261.html
最新文章
第十周 2021.05.09
2021 5 6 团队博客
第九周 2021.05.02
2021 4月 读书笔记
2021 4 29 团队博客
2021 4 26
第八周 2021.04.25
2021 4 23
STD二手图书交流平台团队博客-留言功能
软件工程质量
热门文章
STD二手图书交流平台团队博客-登陆问题的解决
STD二手图书交流平台团队博客-界面构建
css渐变
css之常见左右盒子宽高
css介绍
STD二手图书交流平台团队博客 -用户注册
STD二手图书交流平台团队博客-SDK快速集成
梦断代码阅读笔记02
课下阅读2
敏捷软件开发方法-Scrum
Copyright © 2020-2023
润新知