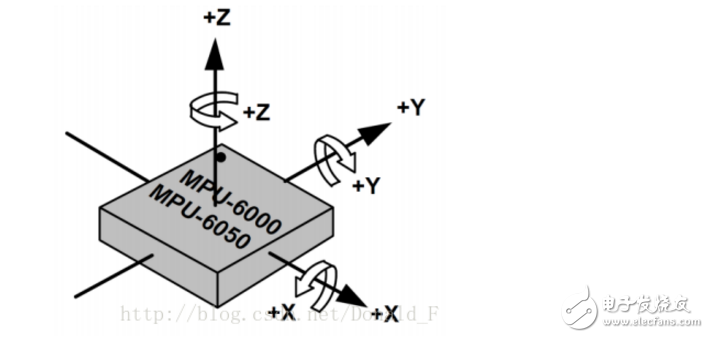
MPU6050是运动处理传感器,它集成了3轴陀螺仪,3轴加速度计以及DMP,其中的DMP是一个可通过IIC接口扩展的数字运动处理器。
对于DMP可以用 InvenSense 公司提供的资料库,使MPU6050可以解算出姿态,通过IIC接口直接输出陀螺仪和加速度数据融合后的四元数,减轻了处理器的负荷,非常适合简单的开发应用。但是,使用DMP的这种硬件解算也存在问题,有时会无法读出数据,因此,在四轴的应用中通常都会采用软件解算,常见的姿态解算方法有:非线性互补滤波算法,卡尔曼滤波算法,Mahony互补滤波算法(可参见Crazypony的开源项目)。
MPU6050通过IIC协议与处理器进行通信。我使用STM32时通常采用软件模拟IIC的方式。
寄存器的查阅
MPU6050的所有寄存器都可以在官方文档“MPU-6000 and MPU-6050 Register Map and DescripTIons”中找到,平时使用中最为重要的有以下几种:电源管理寄存器1和2、陀螺仪配置寄存器、陀螺仪采样率分频寄存器、加速度传感器配置寄存器、配置寄存器。
以电源管理寄存器为例:
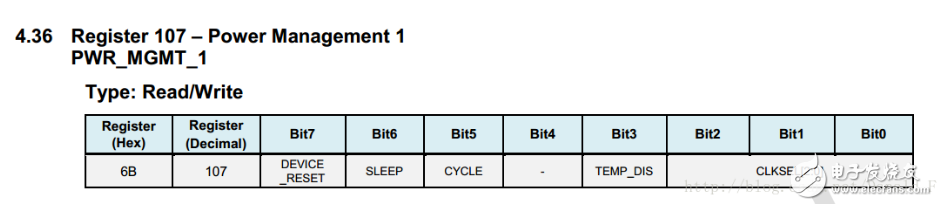
寄存器地址:0x6B(Hex)或107(十进制)。
表格后面的几位Bit7~Bit0代表八位二进制,给该寄存器赋值就是改变这几位的值。各个位代表的意义可看表下方的说明:如DEVICE_RESET :When set to 1, this bit resets all internal registers to their default values.The bit automaTIcally clears to 0 once the reset is done.表明DEVICE_RESET被置1时芯片就会将所有内部寄存器复位。
-
驱动程序
对MPU6050的初始化驱动就是通过IIC的协议,对MPU6050的寄存器进行初始化配置,我选择配置的有:
设置电源管理寄存器1(0X6B),复位MPU6050 (下面举例)
设置陀螺仪配置寄存器(0X1B),将量程设置为 2000dps
设置加速度计配置寄存器(0X1C),将量程设置为 2g
设置采样频率分频器(0X19),将采样率设置为50Hz
设置中断使能寄存器(0X38),关闭中断
设置电源管理寄存器2(0X6C),使加速度陀螺仪都工作
1 //以下函数通过IIC协议,修改MPU6050的电源管理寄存器,实现复位 2 3 //其中的(IIC_……)函数为IIC通信函数,可从名字中了解大致功能,具体应用可参见IIC通信协议的内容 4 5 char MPU_Reset() 6 7 { 8 9 IIC_Start(); 10 11 IIC_Send_Byte((0x68《《1)|0); //发送器件地址+写命令 12 13 if(IIC_Wait_Ack()) 14 15 { 16 17 IIC_Stop(); 18 19 return 1; 20 21 } 22 23 IIC_Send_Byte(0x6B); //写寄存器地址,选择电源管理寄存器1 24 25 IIC_Wait_Ack(); 26 27 IIC_Send_Byte(0x80); //发送数据(1000 0000)第七位为1,复位 28 29 if(IIC_Wait_Ack()) 30 31 { 32 33 IIC_Stop(); 34 35 return 1; 36 37 } 38 39 IIC_Stop(); 40 41 return 0; 42 43 }
按照相同的方法对其余的寄存器进行配置之后,MPU6050就可以正常工作了。接下来的任务就是不断读取它的数据,计算出芯片的姿态了。。。
读取原始数据
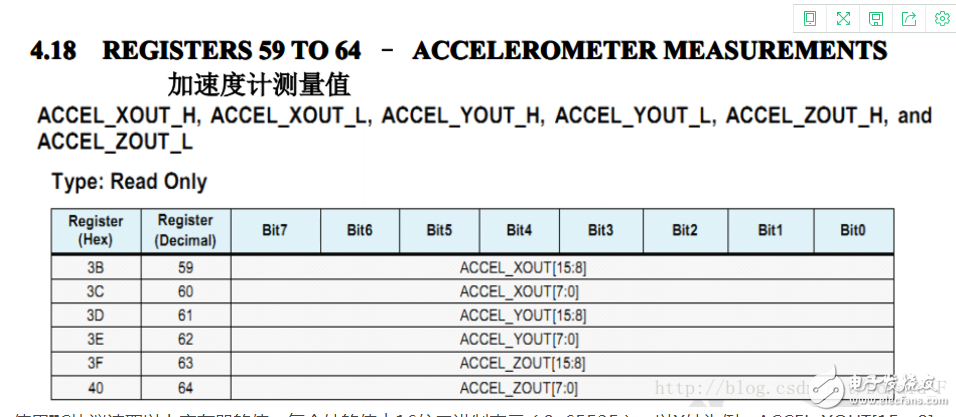
使用IIC协议读取以上寄存器的值,每个轴的值由16位二进制表示(0–65535),以X轴为例:ACCEL_XOUT[15:8]、ACCEL_XOUT[7:0]分别为X轴加速度的高八位和低八位,每次读取八位再将它们拼起来即可。
ax=( (unsigned int)buffer[0]《《8 ) | buffer[1];
此时就获得了MPU6050输出的ADC值了,它是以LSB为单位的,而不是以实际值的 g 为单位,它对应的实际值与你在初始化的时候设置的量程有关。比如说我们设置的量程是+-2g,那对应的灵敏度=65536/4 LSB/g , 那么实际的加速度值=ADC的值LSB / 16384 LSB/g
通过这些我们就可以得到原始数据了,顺便附上初始化MPU6050源代码:
1 itStructure); 2 3 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; 4 5 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD; GPIO_Init(GPIOB, &GPIO_InitStructure); 6 7 if(Single_Read(MPU6050_Addr,WHO_AM_I)==0x68) { 8 9 Single_Write(MPU6050_Addr,PWR_MGMT_1, 0x00); 10 11 //电源管理1,解除休眠状态,时钟为内部8MHz 12 13 Single_Write(MPU6050_Addr,SMPLRT_DIV, 0x07);//采样速率125Hz Single_Write(MPU6050_Addr,CONFIG,0x06); 14 15 //不使能FSYNC,不使用外同步采样速率;DLPF_CFG[2~0],设置任意轴是否通过DLPF, 16 17 //典型值:0x06(5Hz)低通滤波器带宽5Hz, 18 19 //对加速度和陀螺仪都有效,输出频率为1kHz,决定SMPLRT_DIV的频率基准 20 21 Single_Write(MPU6050_Addr,GYRO_CONFIG, 0x08);//不自测,量程设置500°/s /*?GYRO 量程单位系数 22 23 +-250 deg/s 131 LSB/deg/s 初始化hex 0x00 +-500 deg/s 65.5 LSB/deg/s 0x08 +-1000 deg/s 32.8 LSB/deg/s 0x10 +-2000 deg/s 16.4 LSB/deg/s 0x18 */ 24 25 Single_Write(MPU6050_Addr,ACCEL_CONFIG, 0x00);//不自测,量程设置2g 26 27 /* Accle any axe 28 29 +-2 g 16384 LSB/g +-4 g 8192 LSB/g +-8 g 4096 LSB/g +-16 g 2048 LSB/g 30 31 */ 32 33 return 0; } return 1; } 34 35 //******读取MPU6050数据**************************************** //************************************** 36 37 //读取mpu6050内部数据,两个字节,合成数据 //************************************** s16 38 39 GetData(u8 40 41 REG_Address) 42 43 //返回值为有符号的整形,16位 { 44 45 s16 H=0,L=0; 46 47 H = Single_Read(MPU6050_Addr,REG_Address); //先读高字节,再读低字节 48 49 L = Single_Read(MPU6050_Addr,REG_Address+1); return 50 51 (H《《8)+L; 52 53 //合成数据,为有符号整形数 } 54 55 //-------------加速度部分解算角度------------------ 56 57 s32 Read_Acc(void) { 58 59 s32 Accel_x; //mpo6050读出的X轴加速度 s32 Accel_z; //mpu6050读出的z轴加速度 //-------------加速度部分解算------------------ 60 61 /*使用是加速度轴x轴正向朝向小车行径方向,y轴陀螺仪的正向 逆时针方向。 加速度计的量程范围见配置 不自测,量程设置4g scal系数为8192 Accle any axe 62 63 +-2 g 16384 LSB/g +-4 g 8192 LSB/g +-8 g 4096 LSB/g +-16 g 2048 LSB/g */ 64 65 Accel_x = GetData(ACCEL_XOUT_H); //从mpu6050读取X轴加速度 Accel_z = GetData(ACCEL_ZOUT_H); //从mpu6050读取z轴加速度 66 67 if(Accel_x》0) { 68 69 Angle_accel = atan2((float)Accel_x,(float)Accel_z)*(180/3.14159265);//反正切计算rad 70 71 /* atan2(y,x)是表示X-Y平面上所对应的(x,y)坐标的角度, 它的值域范围是(-Pi,Pi) 用数学表示就是:atan2(y,x)=arg(y/x)-Pi 当y《0时,其值为负, 72 73 当y》0时,其值为正。 atan2*180/Pi可以计算出角度值 */ 74 75 } 76 77 else { 78 79 s32 read_gyro_y; s32 Angle_gyro; //-------角速度解算------------------------- 80 81 //角速度量程见配置 本处使用1000 deg/s。scal系数为32.8 LSB /*?GYRO 量程单位系数 82 83 +-250 deg/s 131 LSB/deg/s offset 44.38188277*2 +-500 deg/s 65.5 LSB/deg/s offset 44.38188277 +-1000 deg/s 32.8 LSB/deg/s ok offset 44.38188277/2 +-2000 deg/s 16.4 LSB/deg/s offset 44.38188277/4 */ 84 85 read_gyro_y= GetData(GYRO_YOUT_H)+Gyro_y_offset; //静止时角速度Y轴输出 //Gyro_y_offset计算方法gyro静止时候N多个数据的算术均值 86 87 Angle_gyro= -read_gyro_y/65.5; //去除零点偏移,计算角速度值,负号为方向处理 //Angle_gyro测量值的单位是 deg/s.测量的物理量是角速度。 return Angle_gyro; } 88 89 Angle_accel 90 91 = 92 93 atan2((float)Accel_z,(float)Accel_x)*(180/3.14159265)-90;//反正切计算 Angle_accel = -Angle_accel; } 94 95 //angle_accel物理量单位是角度 deg! return Angle_accel; } 96 97 //陀螺仪计算Y轴的角速度 s32 Read_Gry(void) {