在成功构建了一个能够运行在开发板平台的系统后,下一步就要正式开始项目的实现(这里前提是有一定的C语言基础,对ARM体系的软/硬件有一定了解),根据需求分解任务,可以发现包含的外设有LED,BEEP,RS232,六轴传感(SPI接口),光环境传感器(I2C),音频输出, RTC等,如果按照这个顺序去实现驱动,一定程度其实又回归最初的模块学习的策略,如果从应用的角度,先实现基本框架,来验证能否满足预期,这比测试模块驱动的更重要,也更容易有产出感。 按照这个需求,就可以先把实际工作分解为如下几个步骤:
1.完成LED驱动,能够正常控制LED的点亮和关闭(本节完成)
2.完成RS232的驱动,能够实现串口的通讯
3.定义一套上位机、下位机之间的通讯协议(也可以使用主流工业协议如Modbus), 并在上位机和下位机编码实现通讯协议的组包和解包
4.实现一套界面化的上位机工具,带有调试功能和控制功能
既然初步的工作已经清晰,就可以开始第一步的工作,完成LED的驱动。
参考资料
1. 开发板原理图 《IMX6UL_ALPHA_V2.0(底板原理图)》 《IMX6ULL_CORE_V1.4(核心板原理图)》
2. 正点原子《Linux驱动开发指南说明V1.0》 第四十章 字符驱动设备开发
3. 宋宝华 《Linux设备驱动开发详解:基于最新的Linux 4.0内核》 第六章 字符驱动设备
4. 恩智浦官方手册 《IMX6ULL参考手册》Chapter 18:Clock Controller Module(CCM)/Chapter 28:General Purpose Input/Output (GPIO)
LED硬件配置实现
首先当然要确定原理图,下图来自底板和核心板原理图。

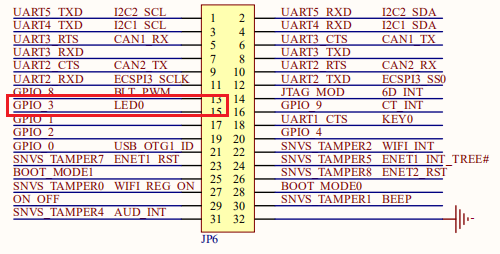

通过追踪就可以查看当前使用LED的引脚为GPIO1_IO3。
确定硬件后,第一步就是配置GPIO需要使用的寄存器了,对于使用过单片机的用户来说,对于GPIO这类外设,一般包含以下步骤:
1. 使能模块时钟
2. 配置模块或者相关模块的寄存器,使模块复用到需要的功能
3. 提供对外访问的接口
对于嵌入式Linux来说,这部分也没有区别,硬件初始化接口(具体寄存器可使用《IMX6ULL参考手册》查询)


1 /** 2 * LED硬件初始化,引脚GPIO1_IO03 3 * 4 * @param NULL 5 * 6 * @return NULL 7 */ 8 static void led_gpio_init(void) 9 { 10 u32 value; 11 12 /*1. 寄存器地址映射*/ 13 IMX6U_CCM_CCGR1 = ioremap(0X020C406C, 4); //时钟使能 14 SW_MUX_GPIO1_IO03 = ioremap(0X020E0068, 4); //复用功能设置 15 SW_PAD_GPIO1_IO03 = ioremap(0X020E02F4, 4); //设置PAD的输出状态 16 GPIO1_DR = ioremap(0X0209C000, 4); //设置LED输出 17 GPIO1_GDIR = ioremap(0X0209C004, 4); //设置GPIO的状态 18 19 /*2.时钟使能*/ 20 value = readl(IMX6U_CCM_CCGR1); 21 value &= ~(3 << 26); 22 value |= (3 << 26); 23 writel(value, IMX6U_CCM_CCGR1); 24 printk("led write 0"); 25 26 /*3.复用功能设置*/ 27 writel(5, SW_MUX_GPIO1_IO03); 28 29 /*4.引脚IO功能设置*/ 30 writel(0x10B0, SW_PAD_GPIO1_IO03); 31 32 /*5.引脚输出功能配置*/ 33 value = readl(GPIO1_GDIR); 34 value |= (1 << 3); /* 设置新值 */ 35 writel(value, GPIO1_GDIR); 36 37 /*5.关闭LED显示,高电平关闭*/ 38 value = readl(GPIO1_DR); 39 value |= (1 << 3); 40 writel(value, GPIO1_DR); 41 42 printk(KERN_INFO"led hardware init ok "); 43 }
硬件资源释放.
1 /** 2 * 释放硬件资源 3 * 4 * @param NULL 5 * 6 * @return NULL 7 */ 8 static void led_gpio_release(void) 9 { 10 iounmap(IMX6U_CCM_CCGR1); 11 iounmap(SW_MUX_GPIO1_IO03); 12 iounmap(SW_PAD_GPIO1_IO03); 13 iounmap(GPIO1_DR); 14 iounmap(GPIO1_GDIR); 15 }
硬件设备管理
1 /** 2 *LED灯开关切换 3 * 4 * @param status LED开关状态,1开启,0关闭 5 * 6 * @return NULL 7 */ 8 static void led_switch(u8 status) 9 { 10 u32 value; 11 value = readl(GPIO1_DR); 12 13 switch(status) 14 { 15 case LED_OFF: 16 printk(KERN_INFO"led off "); 17 value |= (1 << 3); 18 writel(value, GPIO1_DR); 19 break; 20 case LED_ON: 21 printk(KERN_INFO"led on "); 22 value &= ~(1 << 3); 23 writel(value, GPIO1_DR); 24 break; 25 default: 26 printk(KERN_INFO"Invalid LED Set"); 27 break; 28 } 29 }
至此,我们就实现了和硬件执行的接口
led_gpio_init()/led_gpio_release()/led_switch(n)
嵌入式内核模块实现
嵌入式内核模块的参考本系列的第一篇文件,主要提供加载到Linux内核,用于insmod和rmmod访问的接口,这部分因为已经讲过,如果希望理解就去看第一节内容,或者参考上面提供的资料。
Linux加载的接口:
1 /** 2 * 驱动入口函数 3 * 4 * @param NULL 5 * 6 * @return the error code, 0 on initialization successfully. 7 */ 8 static int __init led_module_init(void) 9 { 10 //此处添加设备注册的实现 11 //...... 12 } 13 module_init(led_module_init);
Linux释放的接口:
1 /** 2 * 驱动释放函数 3 * 4 * @param NULL 5 * 6 * @return the error code, 0 on release successfully. 7 */ 8 static void __exit led_module_exit(void) 9 { 10 //此处添加设备注销的实现 11 //...... 12 } 13 module_exit(led_module_exit);
此外,在添加驱动说明,如作者,许可证和驱动说明等
1 MODULE_AUTHOR("zc"); //模块作者 2 MODULE_LICENSE("GPL v2"); //模块许可协议 3 MODULE_DESCRIPTION("led driver"); //模块许描述 4 MODULE_ALIAS("led_driver"); //模块别名
至此本节的准备工作全部完成,下面就开始完成总线上设备的创建,这也是本章最核心的特征。
设备创建和释放
设备创建如果按照固定的结构,使用起来虽然有些困难,如果按照官方流程来实现,是有迹可循的。但是如何从应用层的访问接口open,read,write,close到底层驱动的xxx_open, xxx_read, xxx_write, xxxx_close的调用,这部分的理解在整个驱动机制的重要部分,这部分的难度当然不是一次可以讲清楚的,这里先抛砖引玉,在后面驱动的实践中会步步深入去理解。
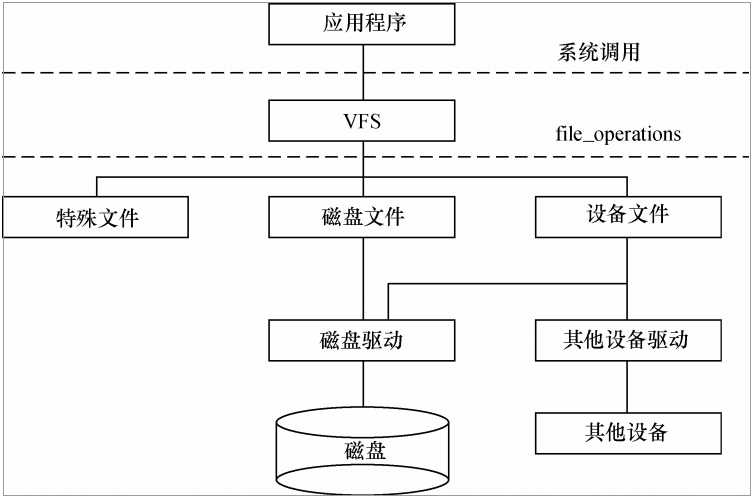
作为熟悉C语言知识的开发者来说,可以很清楚open这一类接口是用来访问文件的,而在Linux中,字符型设备和块设备就体现了"一切都是文件"的思想,参考《Linux设备驱动开发详解:基于最新的Linux 4.0内核》第5章的说明,
通关VFS(virtual Filesytem), 将上层接口操作/dev/*下的设备文件,最后访问到驱动内部注册的实际操作硬件的接口。
想理解这部分知识,就需要理解应用层接口做了什么工作,参考这篇文章,https://www.jianshu.com/p/f3f5a33f2c59,以open为例。
open函数,这里可以简述步骤(下面所有实现在linux/fs/namei.c文件中)
1.获取一个可用的id,用于外部的记录,如fd
2.根据name名称如"/dev/led"获取file指针信息,包含设备的实际信息
3.将fd与file关联起来,后续就可以通关fd直接访问file指针的内容(设备端信息指针file),至此我们就获取设备端的信息
4.创建inode类型的数据nd,这部分就是VFS中链接到真正驱动的位置信息,其中包含的cdev *i_cdev即是和设备相关的指针,至于这部分如何链接到实际设备,等后续深入了解后在详细了解。
5.file和nd的链接则依靠file->f_path.mnt和nd->path.mnt配置相等实现
到达这一步,当然还远远不够,但目前只是初步入门,先不过度深入,下面开始驱动编写。其中在module_init中主要完成注册流程,module_exit中完成释放流程,此外还要实现访问LED的接口,具体如下:
1.访问LED的硬件接口链接
1 /** 2 * 获取LED资源 3 * 4 * @param inode 5 * @param filp 6 * 7 * @return the error code, 0 on initialization successfully. 8 */ 9 int led_open(struct inode *inode, struct file *filp) 10 { 11 filp->private_data = &led_driver_info; 12 return 0; 13 } 14 15 /** 16 * 释放LED设备资源 17 * 18 * @param inode 19 * @param filp 20 * 21 * @return the error code, 0 on initialization successfully. 22 */ 23 int led_release(struct inode *inode, struct file *filp) 24 { 25 return 0; 26 } 27 28 /** 29 * 从LED设备读取数据 30 * 31 * @param filp 32 * @param buf 33 * @param count 34 * @param f_ops 35 * 36 * @return the error code, 0 on initialization successfully. 37 */ 38 ssize_t led_read(struct file *filp, char __user *buf, size_t count, loff_t *f_pos) 39 { 40 return 0; 41 } 42 43 /** 44 * 向LED设备写入数据 45 * 46 * @param filp 47 * @param buf 48 * @param count 49 * @param f_ops 50 * 51 * @return the error code, 0 on initialization successfully. 52 */ 53 ssize_t led_write(struct file *filp, const char __user *buf, size_t count, loff_t *f_pos) 54 { 55 int result; 56 u8 databuf[2]; 57 58 result = copy_from_user(databuf, buf, count); 59 if(result < 0) { 60 printk(KERN_INFO"kernel write failed! "); 61 return -EFAULT; 62 } 63 64 /*利用数据操作LED*/ 65 led_switch(databuf[0]); 66 return 0; 67 } 68 69 /** 70 * light从设备读取状态 71 * 72 * @param filp 73 * @param cmd 74 * @param arg 75 * 76 * @return the error code, 0 on initialization successfully. 77 */ 78 long led_ioctl(struct file *filp, unsigned int cmd, unsigned long arg) 79 { 80 switch(cmd){ 81 case 0: 82 led_switch(0); 83 break; 84 case 1: 85 led_switch(1); 86 break; 87 default: 88 printk(KERN_INFO"Invalid Cmd! "); 89 return -ENOTTY; 90 } 91 92 return 0; 93 } 94 95 /* 设备操作函数 */ 96 static struct file_operations led_fops = { 97 .owner = THIS_MODULE, 98 .open = led_open, 99 .read = led_read, 100 .write = led_write, 101 .unlocked_ioctl = led_ioctl, 102 .release = led_release, 103 };
2.创建设备,添加到设备总线上,这里要提到知识点,
对于一个设备的基本id,由主设备号和子设备号组成,其中主设备就是挂载在/proc/devices下的设备总线上,如果设备已经存在,则可以用register_chdev_region直接生成设备信息,则需要使用alloc_chrdev_region申请新的设备信息。
在获取设备信息结构后,可通过cdev_init将cdev,设备号以及上面的硬件操作接口函数链接起来。
最后通过cdev_add将设备信息挂载到设备总线上,这时通过cat /proc/devices就可以查看设备是否添加成功。
1 int result; 2 3 led_driver_info.major = DEFAULT_MAJOR; 4 led_driver_info.minor = DEFAULT_MINOR; 5 6 /*在总线上创建设备*/ 7 /*1.申请字符设备号*/ 8 if(led_driver_info.major){ 9 led_driver_info.dev_id = MKDEV(led_driver_info.major, led_driver_info.minor); 10 result = register_chrdev_region(led_driver_info.dev_id, DEVICE_LED_CNT, DEVICE_LED_NAME); 11 } 12 else{ 13 result = alloc_chrdev_region(&led_driver_info.dev_id, 0, DEVICE_LED_CNT, DEVICE_LED_NAME); 14 led_driver_info.major = MAJOR(led_driver_info.dev_id); 15 led_driver_info.minor = MINOR(led_driver_info.dev_id); 16 } 17 if(result < 0){ 18 printk(KERN_INFO"dev alloc or set failed "); 19 return result; 20 } 21 else{ 22 printk(KERN_INFO"dev alloc or set ok, major:%d, minor:%d ", led_driver_info.major, led_driver_info.minor); 23 } 24 25 /*2.添加设备到相应总线上*/ 26 cdev_init(&led_driver_info.cdev, &led_fops); 27 led_driver_info.cdev.owner = THIS_MODULE; 28 result = cdev_add(&led_driver_info.cdev, led_driver_info.dev_id, DEVICE_LED_CNT); 29 if(result != 0){ 30 unregister_chrdev_region(led_driver_info.dev_id, DEVICE_LED_CNT); 31 printk(KERN_INFO"cdev add failed "); 32 return result; 33 }else{ 34 printk(KERN_INFO"device add Success! "); 35 }
3.在/dev/下根据设备号创建设备节点,用于应用上层接口的访问,这部分和mknod /dev/led c 主设备号 从设备号功能一致,理论使用指令也可,具体如下。
1 /* 4、创建类 */ 2 led_driver_info.class = class_create(THIS_MODULE, DEVICE_LED_NAME); 3 if (IS_ERR(led_driver_info.class)) { 4 printk(KERN_INFO"class create failed! "); 5 unregister_chrdev_region(led_driver_info.dev_id, DEVICE_LED_CNT); 6 cdev_del(&led_driver_info.cdev); 7 return PTR_ERR(led_driver_info.class); 8 } 9 else{ 10 printk(KERN_INFO"class create successed! "); 11 } 12 13 /* 5、创建设备 */ 14 led_driver_info.device = device_create(led_driver_info.class, NULL, led_driver_info.dev_id, NULL, DEVICE_LED_NAME); 15 if (IS_ERR(led_driver_info.device)) { 16 printk(KERN_INFO"device create failed! "); 17 unregister_chrdev_region(led_driver_info.dev_id, DEVICE_LED_CNT); 18 cdev_del(&led_driver_info.cdev); 19 20 class_destroy(led_driver_info.class); 21 return PTR_ERR(led_driver_info.device); 22 } 23 else{ 24 printk(KERN_INFO"device create successed! "); 25 } 26 27 /*硬件初始化*/ 28 led_gpio_init();
至此,创建设备并添加到设备总线的流程实现完毕,这就是module_init中需要的所有实现。
2.释放模块
在上面我们创建设备,占用了系统资源,在卸载模块的时候,这些都要全部释放,不然就会造成内存的泄露,具体如下。
1 /** 2 * 驱动释放函数 3 * 4 * @param NULL 5 * 6 * @return the error code, 0 on release successfully. 7 */ 8 static void __exit led_module_exit(void) 9 { 10 /* 注销字符设备驱动 */ 11 device_destroy(led_driver_info.class, led_driver_info.dev_id); 12 class_destroy(led_driver_info.class); 13 14 cdev_del(&led_driver_info.cdev); 15 unregister_chrdev_region(led_driver_info.dev_id, DEVICE_LED_CNT); 16 17 /*硬件资源释放*/ 18 led_gpio_release(); 19 } 20 module_exit(led_module_exit);
测试代码实现
在上面驱动代码就已经实现,但对于应用来说,实现驱动并不是结束,我们还要完成测试单元,但驱动的有效性进行测试,这部分因为并不是严格的工业化项目,所以只做简单的测试,代码如下
1 #include<unistd.h> 2 #include<sys/types.h> 3 #include<sys/stat.h> 4 #include<fcntl.h> 5 #include<stdio.h> 6 7 /** 8 * 测试LED工作 9 * 10 * @param NULL 11 * 12 * @return NULL 13 */ 14 int main(int argc, const char *argv[]) 15 { 16 unsigned char val = 1; 17 int fd; 18 19 fd = open("/dev/led", O_RDWR | O_NDELAY); 20 if(fd == -1) 21 { 22 printf("/dev/led open error"); 23 return -1; 24 } 25 26 if(argc > 1){ 27 val = atoi(argv[1]); 28 } 29 30 write(fd, &val, 1); 31 32 close(fd); 33 }
Makefile实现
Makefile的语法也是嵌入式Linux开发中重要知识,如果没有对bash语法有深刻的认识,且理解编译原理的那部分知识,这部分其实也十分困难,这也不是三两句可以说清楚的,等积累一段时间后专门用笔记讲解这部分内容,初步能大致看懂,修改会编译就够了。
1 KERNELDIR := /usr/code/linux 2 CURRENT_PATH := $(shell pwd) 3 obj-m := led.o 4 5 build: kernel_modules 6 7 kernel_modules: 8 $(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules 9 clean: 10 $(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
保存为Makefile后,使用make指令,就可以编译生成需要的led.ko文件,此外通过
arm-linux-gnueabihf-gcc -o led_test led_test.c也可以生成我们需要的测试文件。
文件上传和执行
可通过sd卡,ssh或者nfs系统,将上述文件添加到上章编译完成的系统中,
执行insmod /usr/driver/led.ko将驱动加载
执行lsmod查询当前加载的驱动
通过./usr/app/led_test 1或者./usr/app/led_test 0控制LED的点亮和关闭,现象如下:

总结
至此,关于LED的驱动开发基本讲解完成,虽然开发参考了部分例程用了不到2个小时,但完成这篇文档用了4个小时,为了能够将知识可以解决出来,去查询书籍,以及去查看内核代码,但是这是值得的,我感觉对驱动有了更深刻的认知,但我认为这是值得的,下节将开始Uart驱动的编写实现,整个流程算走上了正轨,不过我本身还要工作,这是因为五一才有这种效率更新,不过我已经制定了计划,希望能够顺利的去学习吧。
代码地址
相关代码在https://github.com/Imx6ull-app/remote_manage中kernal_mod/led下查看。