最近做无线传输方面的东西,需要cc2430开发板和tq2440进行数据串口通信。os为linux。
linux驱动在移植后时已经写好了,所以直接写应用层的程序即可,跟pc的写法类似。
修改自tq的serial_test demo程序,由pc端得串口ttyS0和tq2440的uart1口进行数据通信,互发字符串。
Uart.h文件:
#ifndef UART2_H
#define UART2_H
#define FALSE 0
#define TRUE 1
#define WORDLEN 32
struct serial_config
{
unsigned char serial_dev[WORDLEN];
unsigned int serial_speed;
unsigned char databits;
unsigned char stopbits;
unsigned char parity;
};
#endif
Uart.c文件:
//--------------------------------------------------------------
// xiaoyang linux uart driver test
// 2011.4.24
//
// Work as console,collect the data from uart2.
// uart0:Debug
// uart1:free
// uart2:data path
//--------------------------------------------------------------
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h> //文件控制定义
#include <termios.h> //posix中断控制定义
#include <errno.h> //错误定义
#include <ctype.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <time.h>
#include <unistd.h>
#include "pthread.h"
#include "uart2.h"
struct serial_config Uart2_Cfg;
static int serial_fd,beep_fd;
const int speed_arr[] = {
B230400, B115200, B57600, B38400, B19200, B9600, B4800, B2400, B1200, B300,
B38400, B19200, B9600, B4800, B2400, B1200, B300
};
const int name_arr[] = {
230400, 115200, 57600, 38400, 19200, 9600, 4800, 2400, 1200, 300,
38400, 19200, 9600, 4800, 2400, 1200, 300
};
//-----------------------------------------------
// print content of uart2.cfg
//-----------------------------------------------
void print_serialread()
{
printf("serialread.dev is %s\n",Uart2_Cfg.serial_dev);
printf("Uart2_Cfg.speed is %d\n",Uart2_Cfg.serial_speed);
printf("Uart2_Cfg.databits is %d\n",Uart2_Cfg.databits);
printf("Uart2_Cfg.stopbits is %d\n",Uart2_Cfg.stopbits);
printf("Uart2_Cfg.parity is %c\n",Uart2_Cfg.parity);
}
//-----------------------------------------------
// read uart2.cfg
//-----------------------------------------------
void read_uart2_cfg()
{
FILE *serial_fp;
char tmp[10];
//读取配置文件
serial_fp = fopen("/etc/uart2.cfg","r");
if(NULL == serial_fp)
{
printf("can't open /etc/tq2440_serial.cfg\r\n");
}
else
{
fscanf(serial_fp, "DEV=%s\n", Uart2_Cfg.serial_dev);
fscanf(serial_fp, "SPEED=%s\n", tmp);
Uart2_Cfg.serial_speed = atoi(tmp);
fscanf(serial_fp, "DATABITS=%s\n", tmp);
Uart2_Cfg.databits = atoi(tmp);
fscanf(serial_fp, "STOPBITS=%s\n", tmp);
Uart2_Cfg.stopbits = atoi(tmp);
fscanf(serial_fp, "PARITY=%s\n", tmp);
Uart2_Cfg.parity = tmp[0];
}
fclose(serial_fp);
printf("uart cfg read over\r\n");
}
//-----------------------------------------------
// set boardrate
//-----------------------------------------------
void set_speed(int fd)
{
int i;
int status;
struct termios Opt;
if(tcgetattr(fd,&Opt) != 0){
perror("error: set_speed tcgetattr failed!");
return ;
}
for( i = 0; i < sizeof(speed_arr)/sizeof(int); i++)
{
if(Uart2_Cfg.serial_speed == name_arr[i])
{
tcflush(fd, TCIOFLUSH);
cfsetispeed(&Opt, speed_arr[i]);
cfsetospeed(&Opt, speed_arr[i]);
status = tcsetattr(fd, TCSANOW, &Opt);
if(status != 0)
{
perror("error: set_speed tcsetattr failed!");
return;
}
tcflush(fd, TCIOFLUSH);
}
}
}
//-----------------------------------------------
// set other parity
//-----------------------------------------------
int set_parity(int fd)
{
struct termios options;
if(tcgetattr(fd, &options) != 0)
{
perror("error: set_parity tcgetattr failed!");
return(FALSE);
}
options.c_cflag |= (CLOCAL|CREAD);
options.c_cflag &=~CSIZE;
//set data bits lenghth
switch(Uart2_Cfg.databits)
{
case 7:
options.c_cflag |= CS7;
break;
case 8:
options.c_cflag |= CS8;
break;
default:
options.c_cflag |= CS8;
fprintf(stderr, "Unsupported data size\n");
return(FALSE);
}
switch(Uart2_Cfg.parity)
{
case 'n':
case 'N':
options.c_cflag &= ~PARENB;
options.c_iflag &= ~INPCK;
break;
case 'o':
case 'O':
options.c_cflag |= (PARODD | PARENB);
options.c_iflag |= INPCK;
break;
case 'e':
case 'E':
options.c_cflag |= PARENB;
options.c_cflag &= ~PARODD;
options.c_iflag |= INPCK;
break;
default:
options.c_cflag &= ~PARENB;
options.c_iflag &= ~INPCK;
fprintf(stderr, "Unsupported parity\n");
return(FALSE);
}
//set stop bits
switch(Uart2_Cfg.stopbits)
{
case 1:
options.c_cflag &= ~CSTOPB;
break;
case 2:
options.c_cflag |= CSTOPB;perror("error: set_parity tcgetattr failed!");
break;
default:
options.c_cflag &= ~CSTOPB;
fprintf(stderr, "Unsupported stop bits\n");
return(FALSE);
}
if(Uart2_Cfg.parity != 'n')
options.c_iflag |= INPCK;
options.c_cc[VTIME] = 0; //150,15 seconds
options.c_cc[VMIN] = 0;
#if 1
options.c_iflag |= IGNPAR|ICRNL;
options.c_oflag |= OPOST;
options.c_iflag &= ~(IXON|IXOFF|IXANY);
#endif
tcflush(fd, TCIFLUSH);
if(tcsetattr(fd, TCSANOW, &options) != 0)
{
perror("error: set_parity tcsetattr failed!");
return(FALSE);
}
return(TRUE);
}
//-----------------------------------------------
// open device
//-----------------------------------------------
int open_dev(char *dev)
{
int fd = open(dev, O_RDWR, 0);
if(-1 == fd)
{
perror("Can't Open Serial Port");
return -1;
}
else
return fd;
}
//--------------------------------------------------
// uart initialization
//--------------------------------------------------
void uart2_init(void)
{
char *dev;
int i;
read_uart2_cfg();
print_serialread();
dev = Uart2_Cfg.serial_dev;
serial_fd = open_dev(dev);
if(serial_fd > 0)
set_speed(serial_fd);
else
{
printf("Can't Open Serial Port!\n");
exit(0);
}
//恢复串口未阻塞状态
if (fcntl(serial_fd, F_SETFL, O_NONBLOCK) < 0)
{
printf("fcntl failed!\n");
exit(0);
}
//检查是否是终端设备
if(isatty(STDIN_FILENO)==0)
{
printf("standard input is not a terminal device\n");
}
else
printf("isatty success!\n");
//设置串口参数
if(set_parity(serial_fd) == FALSE)
{
printf("Set parity Error\n");
exit(1);
}
}
//--------------------------------------------------
// uart test demo
//--------------------------------------------------
void uart2_test()
{
int i;
char rx_buffer[512];
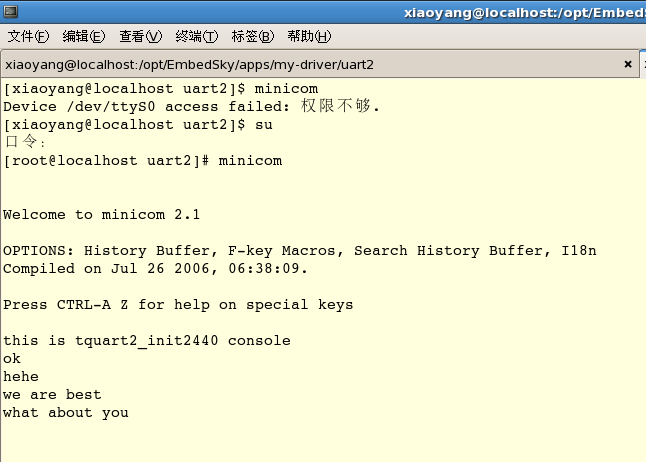
char tx_buffer[] = "this is tquart2_init2440 console\n";
int nread,nwrite;
nwrite = write(serial_fd,tx_buffer,sizeof(tx_buffer));
printf("nwrite len=%d\r\n",nwrite);
while(1)
{
if((nread = read(serial_fd,rx_buffer,512))>0)
{
rx_buffer[nread] = '\0';
printf("\nrecv len:%d\r\n",nread);
printf("content:%s",rx_buffer);
printf("\r\n");
}
}
close(serial_fd);
}
int main(int argc, char **argv)
{
uart2_init();
uart2_test();
return 0;
}
makefile:
#
# uart2 驱动测试
# xiaoyang yi@2011.4.24
#
CC = arm-linux-gcc
LD = arm-linux-ld
EXEC = uart2
OBJS = uart2.o
all: $(EXEC)
$(EXEC): $(OBJS)
$(CC) $(LDFLAGS) -o $@ $(OBJS) -lpthread
rm -f *.o
clean:
-rm -f $(EXEC) *.elf *.gdb *.o
tq2440终端:
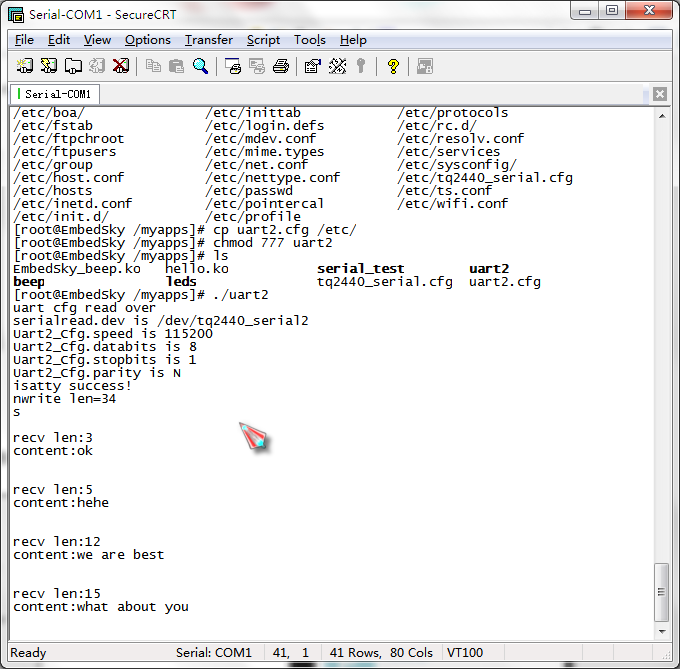
pc串口0终端: