来源:https://www.sohu.com/a/149415053_391994
一、高精度定位
VRS是虚拟参考站(Virtual Reference Station)的简称。这项技术是CORS应用的一种,数据处理中心24小时连续不断地根据各基准站所采集的实时观测数据在区域内进行整体建模解算,通过建立精确的误差模型(如电离层、对流层、卫星轨道等误差模型),在移动站附近产生一个物理上并不存在的虚拟参考站(VRS),由于虚拟参考站的位置是通过流动站接收机(可以是手机,需要装一个App,或者直接用魔盒)的单点定位解来确定,故其与移动站构成的基线通常只有几米到十几米,移动站与虚拟参考站进行载波相位差分改正,实现实时RTK。
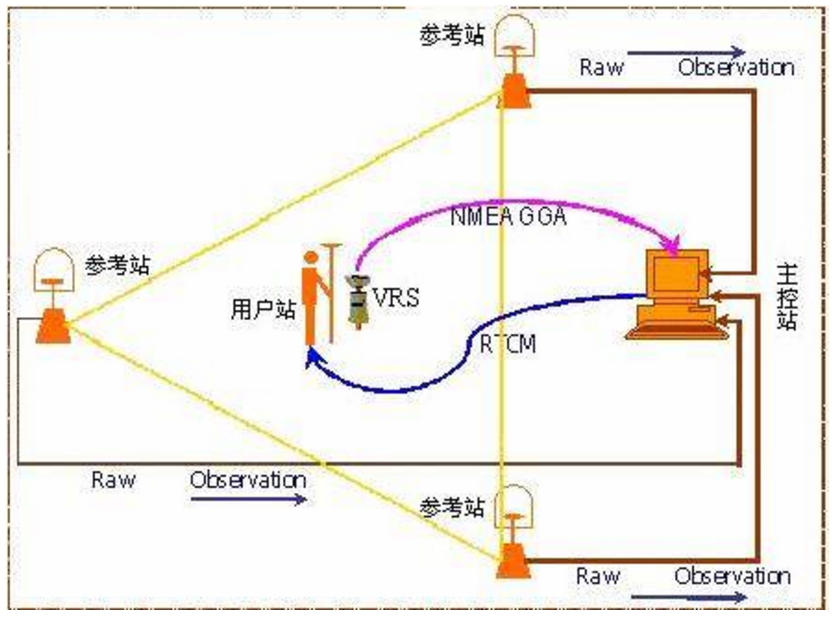
VRS最突出优势是覆盖范围更广:VRS网络中固定参考站的距离增大,站间距离可达到70KM,三个站覆盖的面积可以达到2100多平方公里。以北京为例,城区面积为900多平方公里,三个参考站即可覆盖,北京市面积1.68万平方公里,十个参考站即可覆盖。
但是VRS的缺陷也是很明显的:
(1)采用双向通信,限制了它的同时在线用户数量。
(2)虚拟参考基站随着用户(流动站)的移动(超过一定距离)要重新初始化,并且是不可追踪、不可重复的虚拟的参考基站。
(3)人为的规定了一个参考站站网中参考站的数量,一般情况下为三个。它们是由参考站软件所决定的,用于计算流动站所需要的改正数。此项约束限制了系统采用合适数量的参考站解决占主导地位的大气条件,例如建立大尺度气象活动的模型问题。这种约束也影响到成果的稳定性,并表现出对网络的几何形态及对数据的传输损耗十分敏感。如果三个站中有一个站不能为这个网络提供数据,那么网络软件必须搜索另外一个合适的参考站,并为用户重新安排改正计算。在搜索过程中,没有网络改正数可以提供给流动站用户,影响外业生产的效率。
(4)其播发的数据格式不标准,偏向某一类型的接收机。毕竟天宝还是希望你买它的接收机的。
当然还有一种不依赖GPS的高精度定位,那就是激光雷达和DR(惯导)。
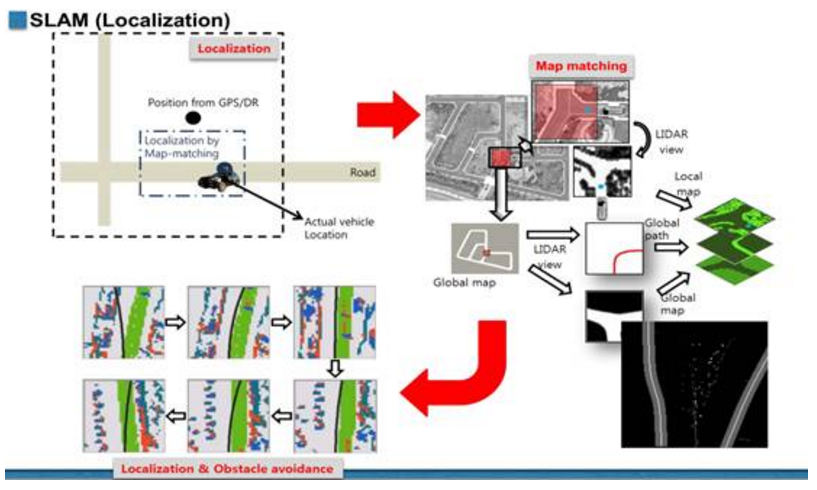
这种定位有一个前提就是必须有一张用激光雷达绘制的先验(Prior)地图,这个工作量太大了,显然很难大规模推广。
二、中国国情
为保障国家安全,所有在中国运行的地图服务商要加装“国家保密插件”(亦称加密插件、加偏或SM模组)。此插件会将真实的坐标加密成虚假的坐标,且此加偏并非线性加偏,所以各地的偏移情况都会有所不同。这就是GCJ-02,它是一种对经纬度数据的加密算法,即加入随机的偏差。 国内出版的各种地图系统(包括电子形式),必须至少采用GCJ-02对地理位置进行首次加密。某些在线地图会采用二次加密来保护自己的商业利益。
三、高精度地图标准之争
一流企业做标准,高精度地图的标准自然不会统一。
电子地图数据格式,有交换格式与物理格式之分。 所谓交换格式,常常是ASCLL码的,数据冗余量大,其目的是为了充分的记录信息,传递给使用方。简言之,交换格式的文件,常常是给人看的,让人很容易能看明白它。例如,MapInfo的MIF格式,就是典型的交换格式。而物理格式,常常是二进制的,紧凑高效,彼此之间的关系常常通过地址来偏移,其目的是为了给计算机使用的,追求的目标是小、快。例如,MapInfo的MAP格式,就是典型的物理格式。
导航电子地图格式分为母库格式、交换格式和存储格式三个层次,格式对导航功能的实现非常重要。母库格式:是导航数据编辑、存储直接进行的格式,主要是方便于编辑和保存,如TAB格式。交换格式:是可以转换到各个应用导航数据的格式,一般都是公开格式,以方便进行转换应用,如GDF格式。四维用NIMIF格式,高德用AXF格式,瑞图用RTM格式。存储格式:本意是指数据在计算机里存储的格式,但是存储格式在导航一般是指导航应用格式,如KIWI格式。母库和交换格式是导航地图厂家自己独有的,要统一格式主要是存储格式。目前市场上导航产品的物理存储格式种类繁多,粗略统计不下三十余种,这样势必会出现一个服务中心应对众多个性化终端处理的难题。因此从实用的角度看,推广采用统一数据规格或存储格式是一个比较优化的策略。
针对上述问题,国内外专家已经启动了新一代可以支持增量更新的导航电子地图存储标准的研究,其中比较有影响力的有日本的KIWI3.0和欧洲的NDS。目前来看,NDS胜算较大。支持NDS的厂家主要有宝马、奔驰、日产、大众、沃尔沃、现代和雷诺。日系和美系目前还没有采纳NDS系统。
三、高精度地图的制作
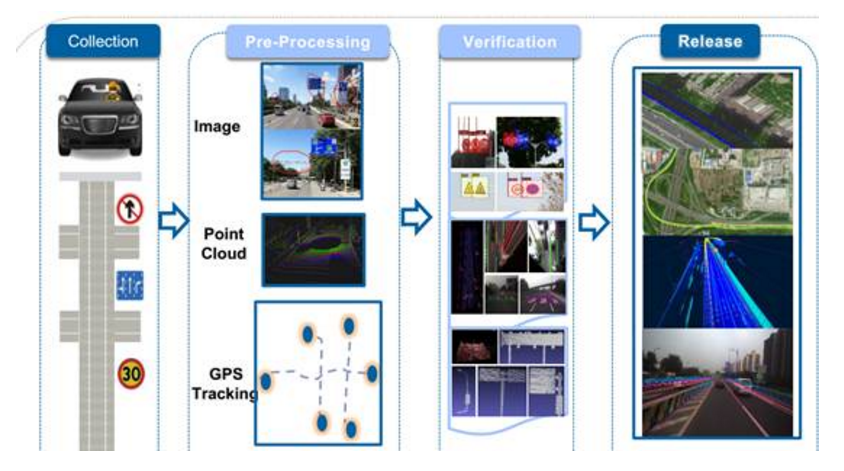
上图为典型的高精度地图制作流程。高精度地图是自动驾驶环境感知的一部分,为自动驾驶的全局路径规划和局部路径规划提供支持。这包括高精度定位能力 HD Localization, 横向/纵向精确定位Lateral/Longitudinal Positioning, 运动规划Motion Planning, 基于车道模型的二次规划 Motion Planning with lanemodel, 智能调速 Acceleration/deceleration, 转向和引导 Steering and guidance。
高精度地图的主要内容
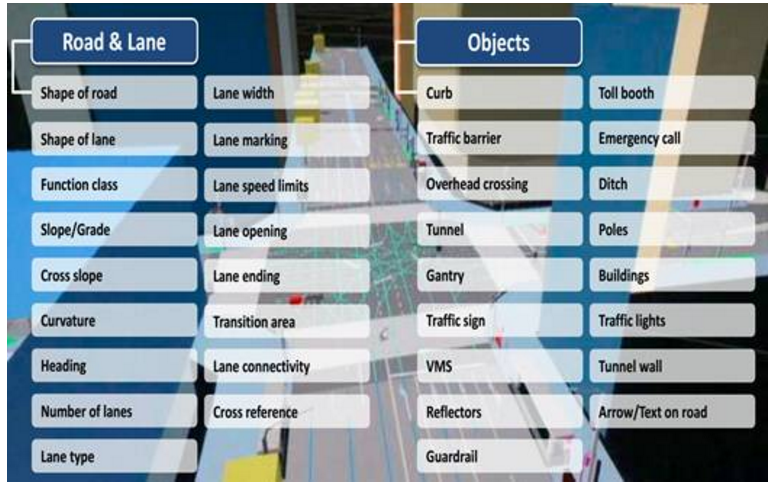
lane opening:车道开始,(此处翻译不一定准确。)
lane ending:车道结束.
transition area:过渡区.
cross reference:交叉路口参照.
ditch:沟渠
gantry:交通龙门架
pole:杆
guardrail:护栏
toll booth:收费亭
reflector:反射镜
VMS:Velocity-Measuring System 速度测量系统
overhead crossing:高架路口

显然,Mobileye那种众包式的离高精度地图相去甚远。因为单目摄像头对距离的计算是完全是2D的,平面的,其距离是根据像素大小估算的,误差可达数米以上。
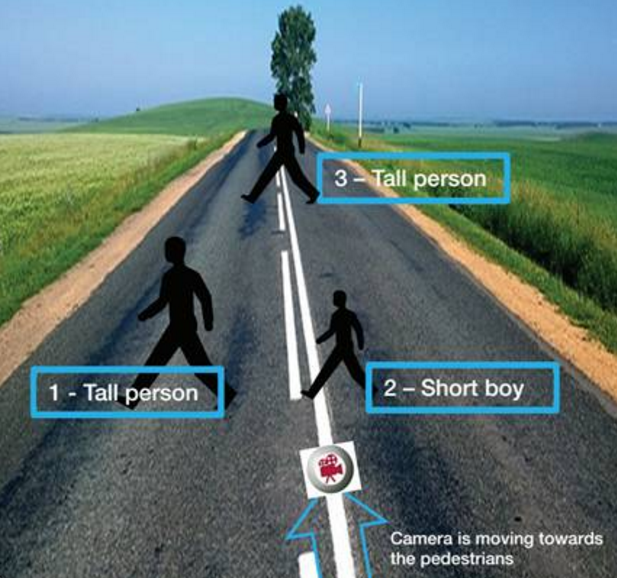
由于距离因素,上图中行人3和行人2的像素大小是非常接近的,但行人2和行人3与车辆距离距离差别很大,单目无法得出准确的距离。完全达不到高精度地图所需要的精度,更不要说不能在夜晚和光线变化较大的场合(林荫道或隧道)使用了。
高精度地图必须依赖激光雷达。