.NET Micro Framework虽然好学易用,但是在一些需要实时,需要高性能的应用领域,却有些勉为其难。毕竟.NET Micro Framework上层应用程序由底层CLR(TinyCLR)解释执行,执行效率被打个折扣是在所难免的。
美国GHI公司(国外.NET Micro Framework硬件产品主要生厂商)为此提供了一个称为RLP方案(https://www.ghielectronics.com/docs/50/rlp-enhanced)。可以让.NET Micro Framework的应用程序调用MDK编写的C++程序,主要是解决性能问题,把一些比较运行比较耗时的代码采用C++完成,功能相对简单。
而我们所提供的方案和他们不同,我们是通过流式驱动的方式用MDK开发C++程序。用户程序采用标准的流式驱动接口进行相关调用。并且流式驱动提供事件机制,底层和上层可以通过事件进行交互。
另外就是为MDK C++程序提供了丰富的.NET Micro Framework PAL层接口,可以让用户随心所欲地开发出功能强大的程序。
在此之前我已经写过两篇相关的文章,用户可以先行了解一下:《.NET Micro Framework动态调用C/C++底层代码(原理篇)》和《【物联网智能网关-11】流式驱动之用户驱动(MDK C++开发)》。
和上一篇文章介绍的功能函数相比,又扩展了一些比较实用的功能,比如I2C、SPI接口,底层中断打开关闭,HAL_COMPLETION、HAL_CONTINUATION类似底层多线程支持和中断程序用户态执行,功能函数由原来的61个扩展到了80个。具体功能接口如下:
struct IGeneralStream_Function { INT32 iParam1; LPCSTR sParam1; //--- void (*Notice_GenerateEvent)(UINT32 data1, UINT32 data2); void (*lcd_printf)(char const * format,...); void (*debug_printf)(char const* format, ... ); void (*HAL_Time_Sleep_MicroSeconds_InterruptEnabled)(UINT32 uSec); UINT32 (*Events_WaitForEvents)(UINT32 WakeupSystemEvents, UINT32 Timeout_Milliseconds); void (*disable_interrupts)(); void (*enable_interrupts)(); void* (*private_malloc)(size_t len); void (*private_free)( void* ptr); //--- lock --- BOOL (*DISABLE_INTERRUPTS)(void* context); BOOL (*ENABLE_INTERRUPTS)(void* context); //HAL_COMPLETION/HAL_CONTINUATION UINT32 (*HAL_COMPLETION_Initialize)(HAL_CALLBACK_FPN EntryPoint,void* Argument); void (*HAL_COMPLETION_Uninitialize)(UINT32 handle); void (*HAL_COMPLETION_EnqueueDelta)(UINT32 handle,UINT32 uSec); UINT32 (*HAL_CONTINUATION_Initialize)(HAL_CALLBACK_FPN EntryPoint,void* Argument); void (*HAL_CONTINUATION_Uninitialize)(UINT32 handle); void (*HAL_CONTINUATION_Enqueue)(UINT32 handle); //--- mem --- int (*hal_snprintf)( char* buffer, size_t len, const char* format, ... ); int (*hal_stricmp)( const char * dst, const char * src ); int (*hal_strncmp_s)( const char* str1, const char* str2, size_t num ); size_t (*hal_strlen_s)(const char * str); void *(*memcpy)(void * dst, const void * src, size_t len); void *(*memset)( void * dst, int value, size_t len ); //--- Flash --- INT32 (*YFSoft_Flash_Erase)( UINT32 address, UINT32 count); INT32 (*YFSoft_Flash_Read)( UINT32 address, UINT32 count,UINT8 *buffer); INT32 (*YFSoft_Flash_Write)( UINT32 address, UINT32 count,UINT8 *buffer); //--- GPIO --- void (*CPU_GPIO_DisablePin)(GPIO_PIN Pin, GPIO_RESISTOR ResistorState, UINT32 Direction, GPIO_ALT_MODE AltFunction); BOOL (*CPU_GPIO_EnableInputPin)(GPIO_PIN Pin, BOOL GlitchFilterEnable, GPIO_INTERRUPT_SERVICE_ROUTINE ISR, GPIO_INT_EDGE IntEdge, GPIO_RESISTOR ResistorState); void (*CPU_GPIO_EnableOutputPin)(GPIO_PIN Pin, BOOL InitialState); BOOL (*CPU_GPIO_GetPinState)(GPIO_PIN Pin); void (*CPU_GPIO_SetPinState)(GPIO_PIN Pin, BOOL PinState); //--- TIMER --- BOOL (*CPU_TIMER_Initialize)(UINT32 timer, UINT32 ARR,UINT16 PSC,HAL_CALLBACK_FPN ISR, void* ISR_Param ); BOOL (*CPU_TIMER_Uninitialize)(UINT32 timer ); void (*CPU_TIMER_Start)(UINT32 timer); void (*CPU_TIMER_Stop)(UINT32 timer); UINT32 (*CPU_TIMER_GetState)(UINT32 timer); void (*CPU_TIMER_SetState)(UINT32 timer,UINT32 state); //--- USART --- BOOL (*USART_Initialize)( int ComPortNum, int BaudRate, int Parity, int DataBits, int StopBits, int FlowValue ); BOOL (*USART_Uninitialize)( int ComPortNum ); int (*USART_Write)( int ComPortNum, const char* Data, size_t size ); int (*USART_Read)( int ComPortNum, char* Data, size_t size ); BOOL (*USART_Flush)( int ComPortNum ); int (*USART_BytesInBuffer)( int ComPortNum, BOOL fRx ); void (*USART_DiscardBuffer)( int ComPortNum, BOOL fRx ); //--- AD/DA --- BOOL (*DA_Initialize)( ANALOG_CHANNEL channel, INT32 precisionInBits ); void (*DA_Write)( ANALOG_CHANNEL channel, INT32 level ); BOOL (*AD_Initialize)( ANALOG_CHANNEL channel, INT32 precisionInBits ); INT32 (*AD_Read)( ANALOG_CHANNEL channel ); //--- PWM ---- BOOL (*PWM_Initialize)( PWM_CHANNEL channel ); BOOL (*PWM_Uninitialize)( PWM_CHANNEL channel ); BOOL (*PWM_ApplyConfiguration)( PWM_CHANNEL channel, GPIO_PIN pin, UINT32& period, UINT32& duration, PWM_SCALE_FACTOR &scale, BOOL invert ); BOOL (*PWM_Start)( PWM_CHANNEL channel, GPIO_PIN pin ); void (*PWM_Stop)( PWM_CHANNEL channel, GPIO_PIN pin ); GPIO_PIN (*PWM_GetPinForChannel)( PWM_CHANNEL channel ); //--- SPI ---- BOOL (*CPU_SPI_nWrite16_nRead16)( const SPI_CONFIGURATION& Configuration, UINT16* Write16, INT32 WriteCount, UINT16* Read16, INT32 ReadCount, INT32 ReadStartOffset ); BOOL (*CPU_SPI_nWrite8_nRead8)( const SPI_CONFIGURATION& Configuration, UINT8* Write8, INT32 WriteCount, UINT8* Read8, INT32 ReadCount, INT32 ReadStartOffset ); //--- I2C ---- BOOL (*I2C_Initialize)(); BOOL (*I2C_Uninitialize)(); BOOL (*I2C_Execute)(UINT16 address,UINT8 *inBuffer,int inCount,UINT8 *outBuffer,int outCount,UINT32 clockRateKhz,int timeout); //--- TinyGUI ---- void (*LCD_ClearEx)(UINT32 color); void (*LCD_SetPixel)(INT32 x,INT32 y,UINT32 color); UINT32 (*LCD_GetPixel)(INT32 x,INT32 y); void (*LCD_DrawLine)(INT32 x1,INT32 y1,INT32 x2,INT32 y2,UINT32 color); void (*LCD_DrawRectangle)(INT32 x,INT32 y,INT32 width,INT32 height,UINT32 color); void (*LCD_DrawEllipse)(INT32 x,INT32 y,INT32 width,INT32 height,UINT32 color); void (*LCD_DrawImage)(INT32 x,INT32 y,UINT8 *bytData); void (*LCD_DrawImageEx)(INT32 x,INT32 y,UINT8 *bytData,UINT32 MaskColor); void (*LCD_DrawString)(INT32 x,INT32 y,LPCSTR s,UINT32 color); void (*LCD_DrawStringEx)(INT32 x,INT32 y,UINT32 color,UINT8 *fontdata,int width,int height,int count); //2012-08-06 void (*LCD_FillRectangle)(INT32 x,INT32 y,INT32 width,INT32 height,UINT32 color); void (*LCD_FillEllipse)(INT32 x,INT32 y,INT32 width,INT32 height,UINT32 color); void (*LCD_GetFrameBufferEx)(UINT8 *bytData,UINT32 offset,UINT32 size); void (*LCD_SuspendLayout)(); void (*LCD_ResumeLayout)(); };
下面简单介绍一下驱动开发步骤。
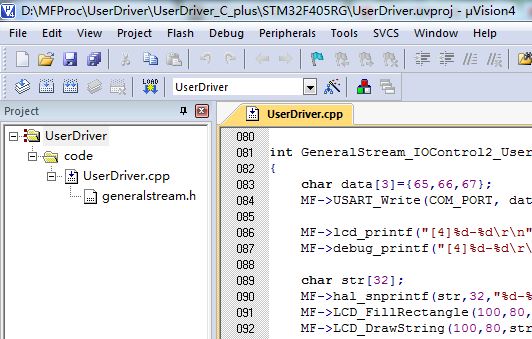
1、 在MDK 4.xx版本创建一个新项目,添加generalstream.h头文件,然后再添加模板文件UserDriver.cpp。如下图所示:
2、 选定MCU类型,可以根据实际硬件选择STM32F103/STM32F207/STM32F407/STM32F405。
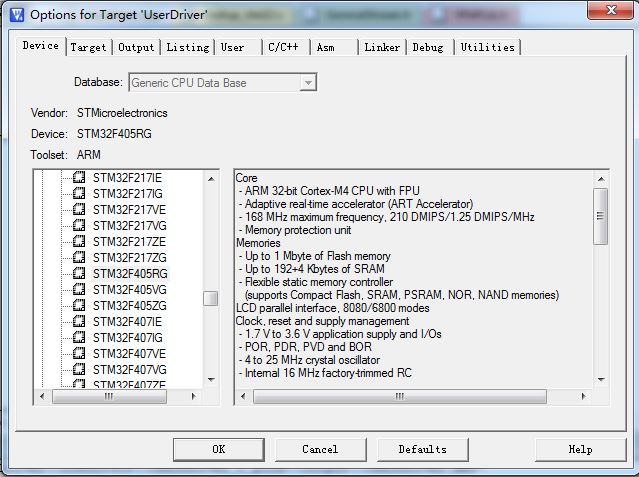
(凌霄智能终端采用的芯片就是STM32F405RG)
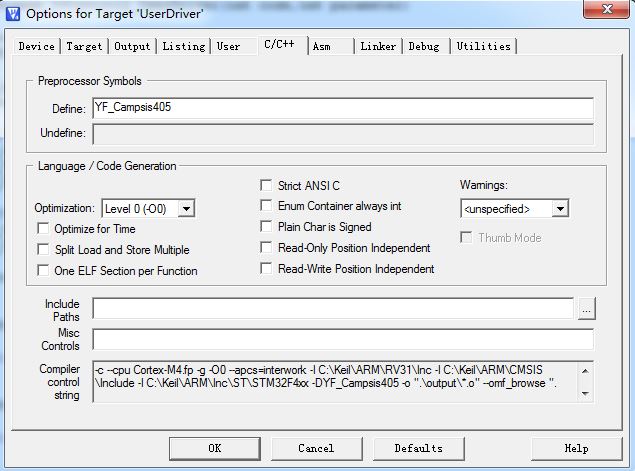
3、 输入对应的平台宏定义
4、 配置针对具体硬件所设置的离散加载配置文件
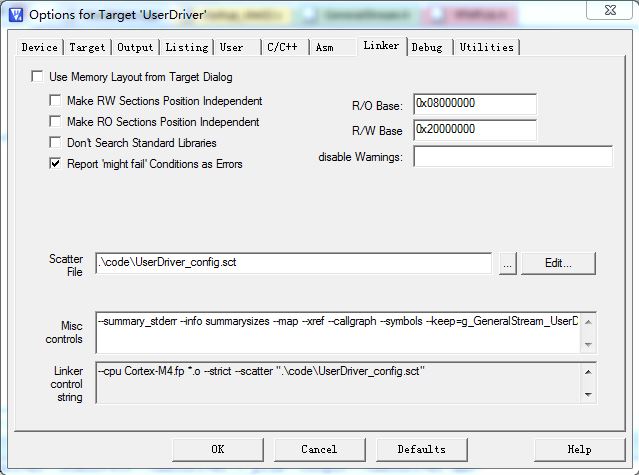
凌霄智能终端的离散加载文件的内容如下:
LR_IROM1 0x08010000 0x00010000 { ; load region size_region
ER_IROM1 0x08010000 0x00010000 { ; load address = execution address
.ANY (+RO)
}
RW_IRAM1 0x20000400 0x00002000 { ; RW data
.ANY (+RW +ZI)
}
}
表示程序加载的位置在0x08010000,大小为64K,RAM空间为0x20000400起始的8K空间。
注:用户驱动除了这部分RAM可用外,还可以直接通过接口提供的内存操作函数,分配堆上的内存。
5、 编写用户驱动(C/C++),下面是一个综合示例,用到了GPIO操作、显示操作、时钟中断操作和事件通知。
#include "GeneralStream.h" //--// #if defined(YF_Campsis103) || defined(YF_Campsis405) #define COM_PORT COM1 #else #define COM_PORT COM3 #endif volatile UINT32 Num; void TIMER_ISR(void* param) { #if defined(YF_Campsis103) || defined(YF_Campsis405) MF->CPU_GPIO_SetPinState(PC0,!MF->CPU_GPIO_GetPinState(PC0)); #else MF->CPU_GPIO_SetPinState(PF6,!MF->CPU_GPIO_GetPinState(PF6)); #endif MF->CPU_TIMER_SetState(TIM3,0); if(Num++>30) { Num=0; //触发事件 MF->Notice_GenerateEvent(UserDriver_Hander,123); } } //--// //Open1永远也不会被调用 int GeneralStream_Open1_UserDriver(LPCSTR config) { return 0; } int GeneralStream_Open2_UserDriver(int config) { //获取系统函数的指针 MF = (IGeneralStream_Function*)config; //C#下传的参数 //MF->lcd_printf("%d,%s ",MF->iParam1,MF->sParam1); MF->debug_printf("%d,%s ",MF->iParam1,MF->sParam1); //初始化LED灯 #if defined(YF_Campsis103) || defined(YF_Campsis405) MF->CPU_GPIO_EnableOutputPin(PC0,TRUE); #else MF->CPU_GPIO_EnableOutputPin(PF6,TRUE); MF->CPU_GPIO_EnableOutputPin(PF7,TRUE); MF->CPU_GPIO_EnableOutputPin(PF8,TRUE); #endif //时钟定时 Num = 0; MF->CPU_TIMER_Initialize(TIM3,200,(SYSTEM_TIM_CLOCK_HZ/2000-1),TIMER_ISR,NULL); MF->CPU_TIMER_Start(TIM3); //初始化串口 MF->USART_Initialize(COM_PORT,115200,USART_PARITY_NONE,8,USART_STOP_BITS_ONE,USART_FLOW_NONE); //显示界面 MF->LCD_ClearEx(Color_Black); MF->LCD_DrawString(10,10,"UserDriver Test",Color_Blue); return 0; } int GeneralStream_Close_UserDriver() { return 0; } int GeneralStream_IOControl1_UserDriver(int code, BYTE *inBuffer, int inCount, BYTE *outBuffer, int outCount) { return -1; } int GeneralStream_IOControl2_UserDriver(int code,int parameter) { char data[3]={65,66,67}; MF->USART_Write(COM_PORT, data, 3); MF->lcd_printf("[4]%d-%d ",code,parameter); MF->debug_printf("[4]%d-%d ",code,parameter); char str[32]; MF->hal_snprintf(str,32,"%d-%d",code,parameter); MF->LCD_FillRectangle(100,80,100,20,Color_Black); MF->LCD_DrawString(100,80,str,Color_Red); #if defined(YF_Wisteria207) || defined(YF_Wisteria407) MF->CPU_GPIO_SetPinState(PF7,! MF->CPU_GPIO_GetPinState(PF7)); MF->CPU_GPIO_SetPinState(PF8,! MF->CPU_GPIO_GetPinState(PF8)); #endif return code+parameter; } int GeneralStream_Read_UserDriver(BYTE *buffer, int offset, int count) { return -1; } int GeneralStream_Write_UserDriver(BYTE *buffer, int offset, int count) { return -1; } //--// //该函数无用,主要是为了编译成功而写 int main(void) { //空 } //--// const IGeneralStream_Function *MF=NULL; const IGeneralStream g_GeneralStream_UserDriver __attribute__ ((at(IGeneralStream_Address))) = { UserDriver_Flag, &GeneralStream_Open1_UserDriver, &GeneralStream_Open2_UserDriver, &GeneralStream_Close_UserDriver, &GeneralStream_IOControl1_UserDriver, &GeneralStream_IOControl2_UserDriver, &GeneralStream_Read_UserDriver, &GeneralStream_Write_UserDriver, };
6、 编译用户驱动,生成UserDriver.bin文件。
7、 采用YFAccessFlash部署UserDriver.bin文件。
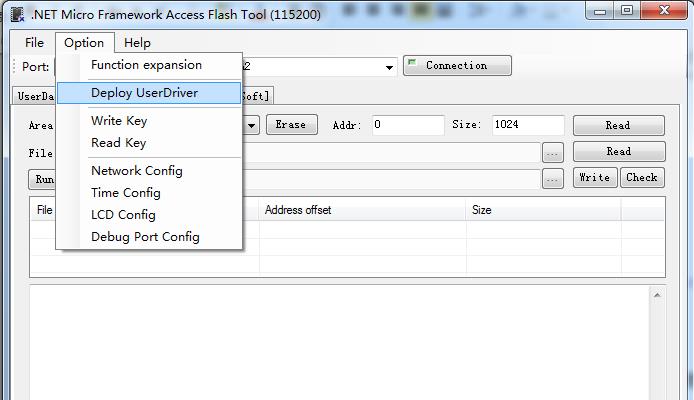
选定UserDriver.bin文件然后直接部署即可。
注:如果这不是初次部署运行用户驱动,需要先终止当前程序的执行,否则部署会出现问题(凌霄103的设备需要先部署应用,然后再部署用户驱动)。
8、 用户程序编写(C#)
public class Program
{
public static void Main()
{
Debug.Print("UserDriver Test ...");
GeneralStream gs = new GeneralStream();
if (gs.Open("UserDriver") <= 0)
{
Debug.Print("Open UserDriver failed!");
return;
}
gs.Notice += new GeneralStreamEventHandler(gs_Notice);
Debug.Print("Open UserDriver OK!");
int e = 0;
byte[] bytData= new byte[8];
while (true)
{
Debug.Print(gs.IOControl(100, e++).ToString());
gs.Read(bytData, e, 10);
System.Threading.Thread.Sleep(1000);
}
}
static void gs_Notice(uint hander, uint data, DateTime timestamp)
{
Debug.Print(hander.ToString() + " - " + data.ToString());
}
}
9、 用户程序写好后,直接在VS 2010中编译执行。
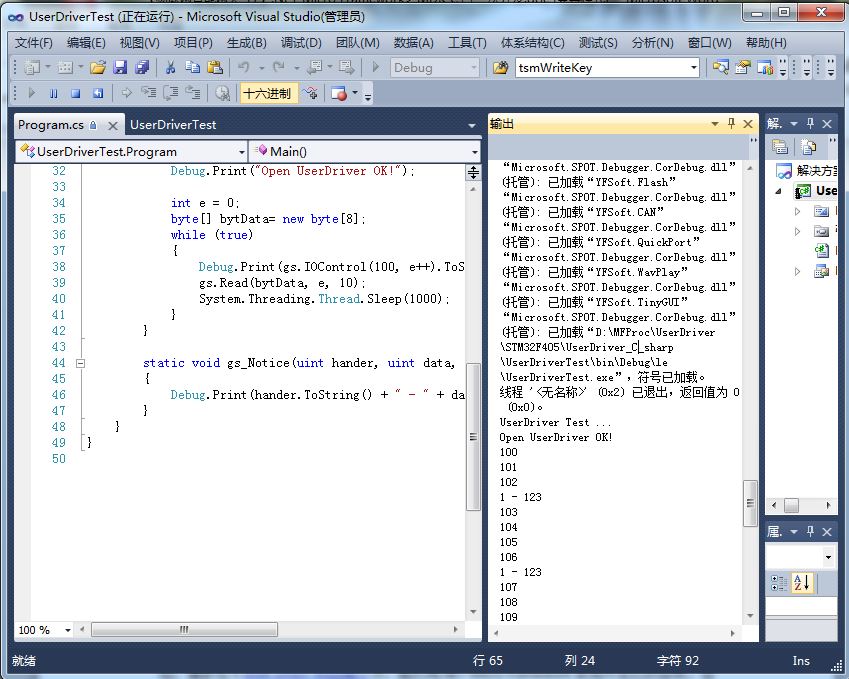
硬件运行效果图(如下):

-------------------------------------------------------