ROS: Robot Operating System
ROS = 通信机制 + 开发工具 + 应用功能 + 生态系统

Linux
sudo 提升管理员权限
tab 补全命令
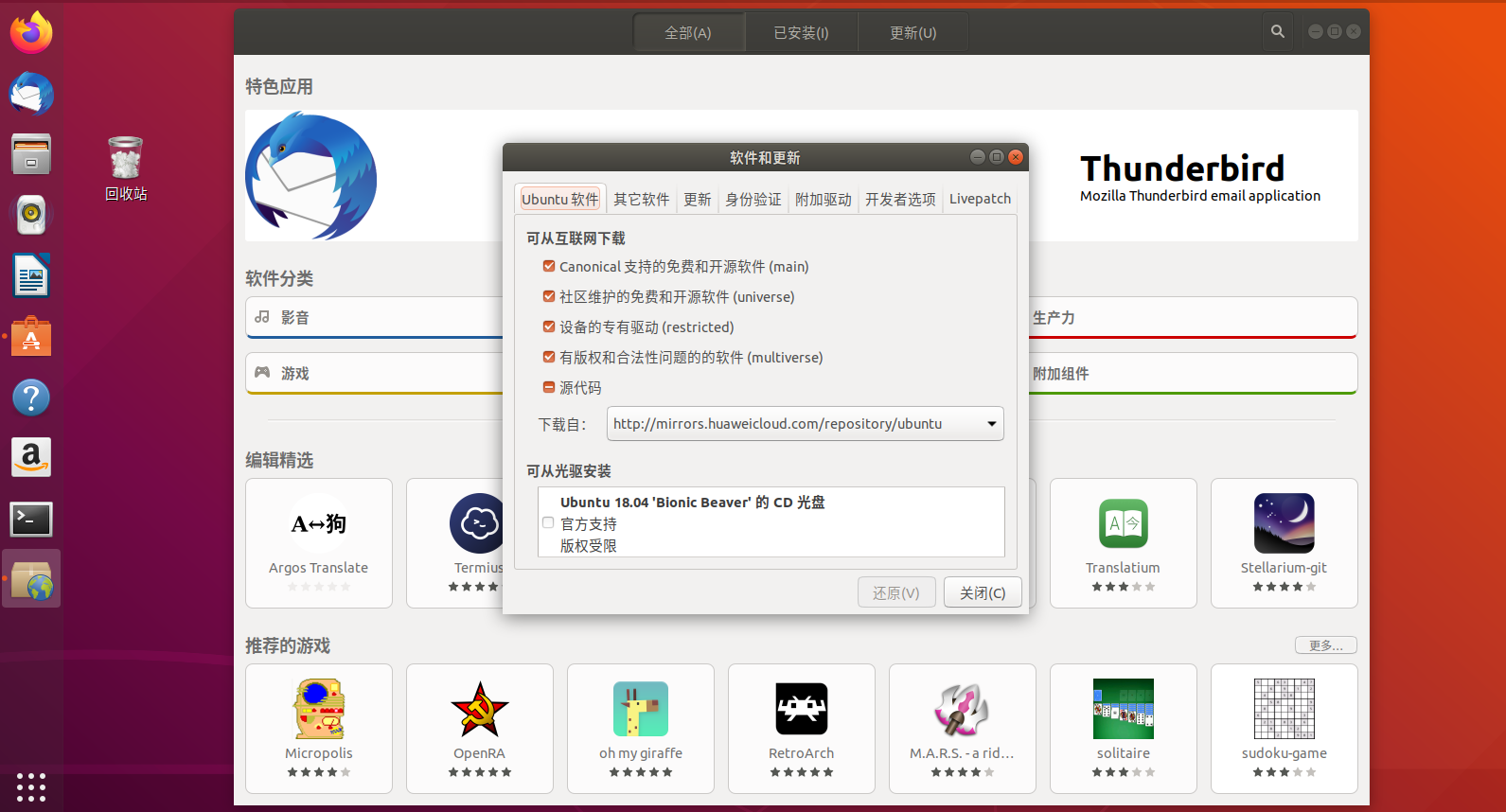
Linux下载源
CTRL + ALT + T 打开一个终端
pwd // 当前目录的路径
cd /home/ //进入home目录
cd hcx // 进入hcx目录
cd .. // 进入上一级目录
mkdir test_folder // 创建test_folder文件夹
ls // 查看当前目录的文件
touch test_file // 新建test_file文件,类似记事本
mv test_file /home/hcx // 剪切文件
cp test_file test_folder // 复制文件test_file到test_folder
rm test_file //删除文件
rm -r test_folder // 删除目录
sudo // 提升当前用户的权限
sudo apt-get update //更新软件源的列表
CTRL + C //暂停执行

sudo apt-get install g++ //安装g++
g++ --version //查看版本号
sudo apt-get install python
python --version

g++ -o test test.cpp //编译.cpp文件
./test //运行

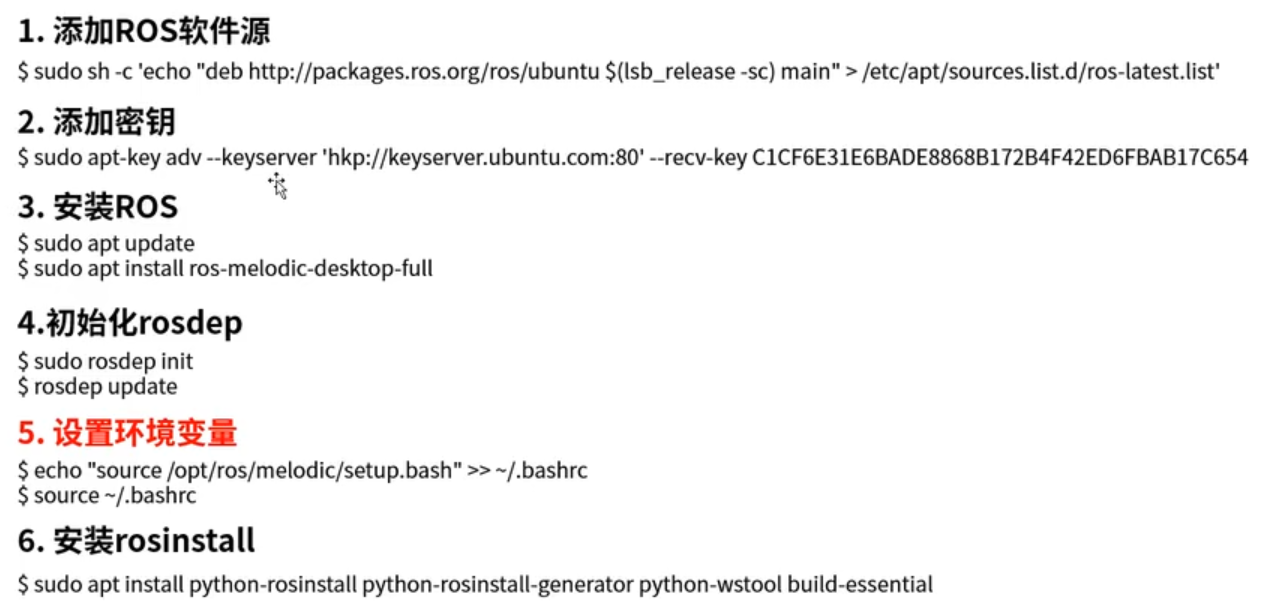
ROS安装
CTRL + shift + V //粘贴
CTRL + shift + C //复制
roscore // 运行ros
海归仿真器
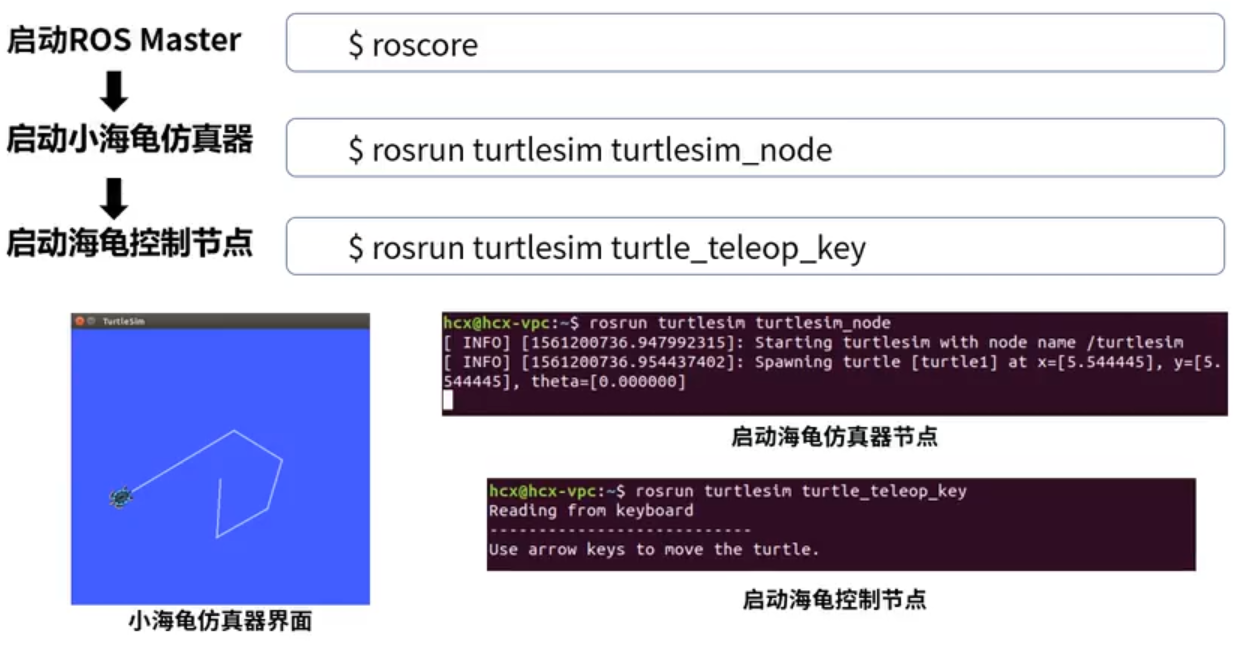
注意:要开3个终端。
ROS开发工具

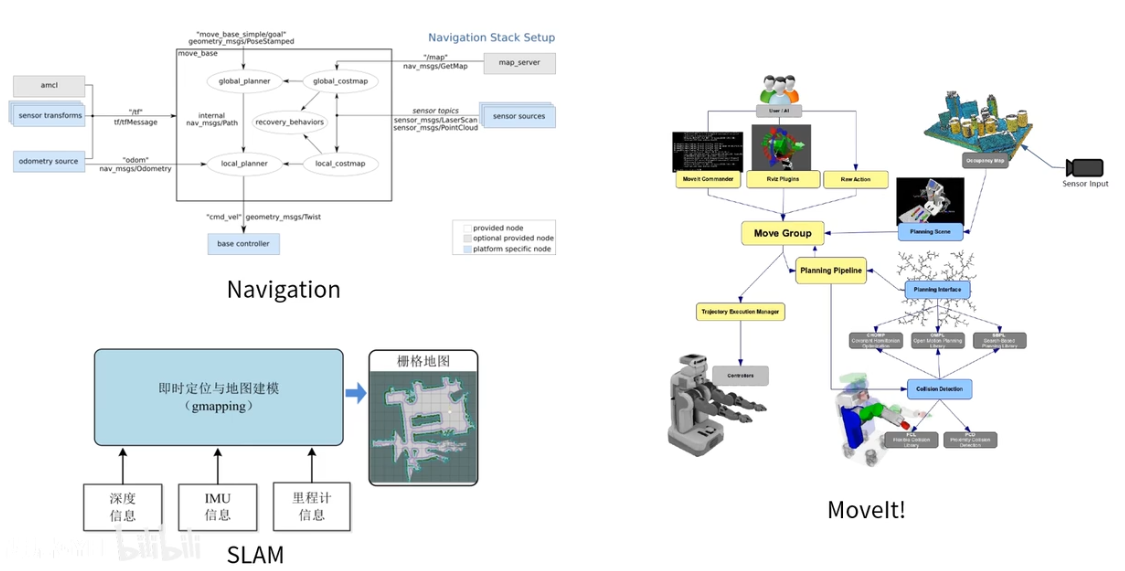
应用功能
ROS生态系统


文件系统

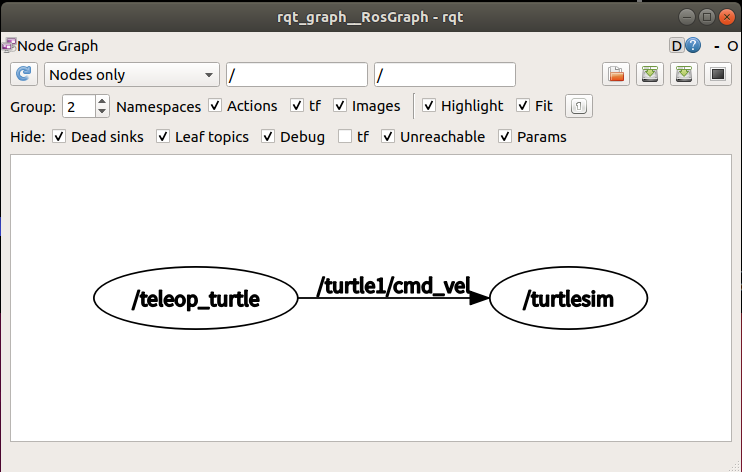
rqt_graph // 显示系统计算图的工具


rosnode // 节点 rosnode list // 列出所有节点列表 rosnode info // 查看所有信息 rostopic // 话题 rostopic list // 话题列表 rostopic pub // 默认定义 // 长度:单位m // 角度:弧度arc rosmsg show rosservice list rosservice call rosbag play cmd_record.bag

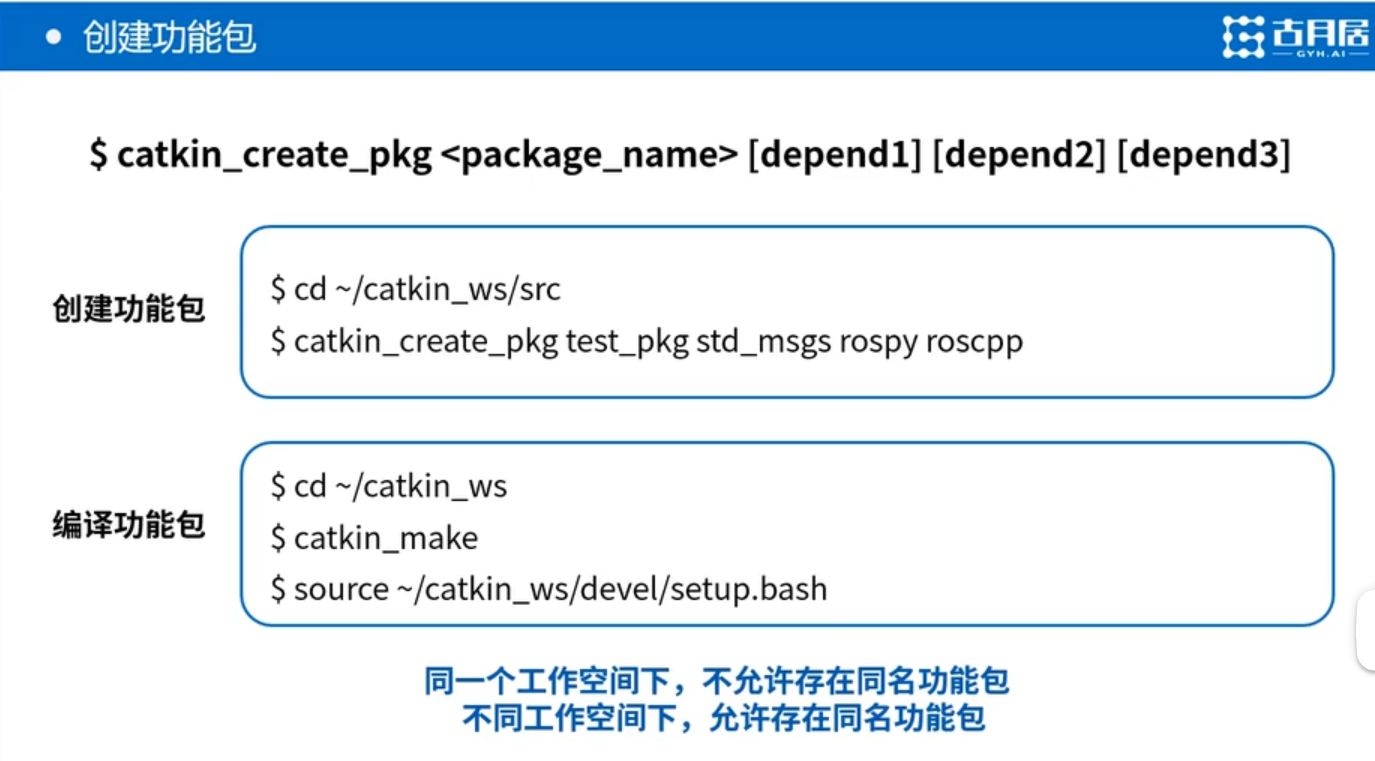
virtual-machine:~$ mkdir catkin_ws virtual-machine:~$ cd catkin_ws/ virtual-machine:~/catkin_ws$ mkdir src virtual-machine:~/catkin_ws$ ls virtual-machine:~/catkin_ws$ cd src virtual-machine:~/catkin_ws/src$ catkin_init_workspace
virtual-machine:~/catkin_ws/src$ cd .. virtual-machine:~/catkin_ws$ pwd /home/xieyi/catkin_ws virtual-machine:~/catkin_ws$ catkin_make //编译
catkin_make install
virtual-machine:~/catkin_ws$ source devel/setup.bash // 设置环境变量
virtual-machine:~/catkin_ws$ echo $ROS_PACKAGE_PATH // 检查环境变量设置


