概念
感知机是一种二元线性分类器。输入一组代表实例特征的向量,感知机可以计算出实例的类别。
二元分类指的是感知机输出的结果只有两类,代表是或否。实际应用中,一些问题要求的输出就是是或否,比如根据照片识别性别,识别图片中是否存在某种物品,根据X光片判断是否患病,判断邮件是否是垃圾邮件等等。
多个是或否的判断嵌套叠加起来,就可以处理复杂的逻辑,也可以输出多元分类。所以,使用多个类似感知机的分类器,组合成一个计算模型,可以解决多种复杂的识别/决策问题。这样的一个计算模型被叫做人工神经网络,其中的单个分类器被叫做人工神经元。
数学模型
感知机的数学模型是:

x是代表实例特征的一维数组
w是代表每个特征权重的一维数组
是两个数组的点积
b是一个代表偏置的常数
当时,感知机输出1,代表结果为true,神经元被激活;否则输出0,代表结果为false,神经元未被激活。
几何含义: 这一超平面,把空间分隔成两部分
应用示例
用感知机来实现并运算:取,
,
, 对于以下输入通过感知机计算得出y值和并运算真值表的相同,这样我们就通过感知机模拟了一个并运算函数。
| |
|
|
| 1 | 0 | 0 |
| 0 | 1 | 0 |
| 0 | 0 | 0 |
| 1 | 1 | 1 |
下图展示了真值表的坐标,和一条代表感知机的直线。
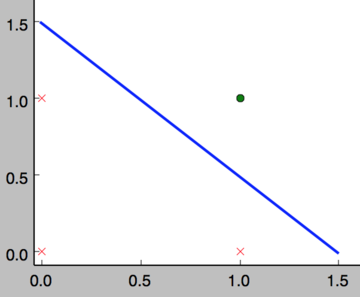
能正确分类的直线有无数条。w和b也有无数种正确的取值。
并运算只有四个样本,两个特征,是一个最简单的例子。通常我们要处理的问题有更多样本,更多特征。
感知器可以拟合任何的线性函数,可以用来解决任何线性分类。但是解决不了线性不可分的问题,对于线性不可分问题,需要通过多个感知机组成的网络来处理。
训练
使用给定样本,寻找权重w和偏置b的过程,叫做训练
训练算法:
设置w和b默认值为0,然后不断迭代更新,直到能正确分类所有样本
其中
t代表训练样本的实际值,被称为label,y代表使用当前参数感知机的输出值,代表学习率,是一个需要手工设定的超参数。
下面的代码定义了一个包含训练方法的感知机类型。
class Perceptron(object):
def __init__(self, input_num, activator):
'''
初始化感知器,设置输入参数的个数,以及激活函数。
激活函数的类型为double -> double
'''
self.activator = activator
# 权重向量初始化为0
self.weights = [0.0 for _ in range(input_num)]
# 偏置项初始化为0
self.bias = 0.0
def __str__(self):
'''
打印学习到的权重、偏置项
'''
return 'weights :%s
bias :%f
' % (self.weights, self.bias)
def predict(self, input_vec):
'''
输入向量,输出感知器的计算结果
'''
# 把input_vec[x1,x2,x3...]和weights[w1,w2,w3,...]打包在一起
# 变成[(x1,w1),(x2,w2),(x3,w3),...]
# 然后利用map函数计算[x1*w1, x2*w2, x3*w3]
# 最后利用reduce求和
return self.activator(
reduce(lambda a, b: a + b,
map(lambda (x, w): x * w,
zip(input_vec, self.weights))
, 0.0) + self.bias)
def train(self, input_vecs, labels, iteration, rate):
'''
输入训练数据:一组向量、与每个向量对应的label;以及训练轮数、学习率
'''
for i in range(iteration):
self._one_iteration(input_vecs, labels, rate)
def _one_iteration(self, input_vecs, labels, rate):
'''
一次迭代,把所有的训练数据过一遍
'''
# 把输入和输出打包在一起,成为样本的列表[(input_vec, label), ...]
# 而每个训练样本是(input_vec, label)
samples = zip(input_vecs, labels)
# 对每个样本,按照感知器规则更新权重
for (input_vec, label) in samples:
# 计算感知器在当前权重下的输出
output = self.predict(input_vec)
# 更新权重
self._update_weights(input_vec, output, label, rate)
def _update_weights(self, input_vec, output, label, rate):
'''
按照感知器规则更新权重
'''
# 把input_vec[x1,x2,x3,...]和weights[w1,w2,w3,...]打包在一起
# 变成[(x1,w1),(x2,w2),(x3,w3),...]
# 然后利用感知器规则更新权重
delta = label - output
self.weights = map(
lambda (x, w): w + rate * delta * x,
zip(input_vec, self.weights))
# 更新bias
self.bias += rate * delta
使用这个类来训练一个并函数
def f(x):
'''
定义激活函数f
'''
return 1 if x > 0 else 0
def get_training_dataset():
'''
基于and真值表构建训练数据
'''
# 构建训练数据
# 输入向量列表
input_vecs = [[1,1], [0,0], [1,0], [0,1]]
# 期望的输出列表,注意要与输入一一对应
# [1,1] -> 1, [0,0] -> 0, [1,0] -> 0, [0,1] -> 0
labels = [1, 0, 0, 0]
return input_vecs, labels
def train_and_perceptron():
'''
使用and真值表训练感知器
'''
# 创建感知器,输入参数个数为2(因为and是二元函数),激活函数为f
p = Perceptron(2, f)
# 训练,迭代10轮, 学习速率为0.1
input_vecs, labels = get_training_dataset()
p.train(input_vecs, labels, 10, 0.1)
#返回训练好的感知器
return p
if __name__ == '__main__':
# 训练and感知器
and_perception = train_and_perceptron()
# 打印训练获得的权重
print and_perception
# 测试
print '1 and 1 = %d' % and_perception.predict([1, 1])
print '0 and 0 = %d' % and_perception.predict([0, 0])
print '1 and 0 = %d' % and_perception.predict([1, 0])
print '0 and 1 = %d' % and_perception.predict([0, 1])