Hash Join只能用于相等连接,且只能在CBO优化器模式下。相对于nested loop join,hash join更适合处理大型结果集
Hash Join的执行计划第1个是hash表(build table),第2个探查表(probe table),一般不叫内外表,nested loop才有内外表
Hash表也就是所谓的内表,探查表所谓的外表
两者的执行计划形如:
nested loop
outer table --驱动表
inner table
hash join
build table (inner table) --驱动表
probe table (outer table)
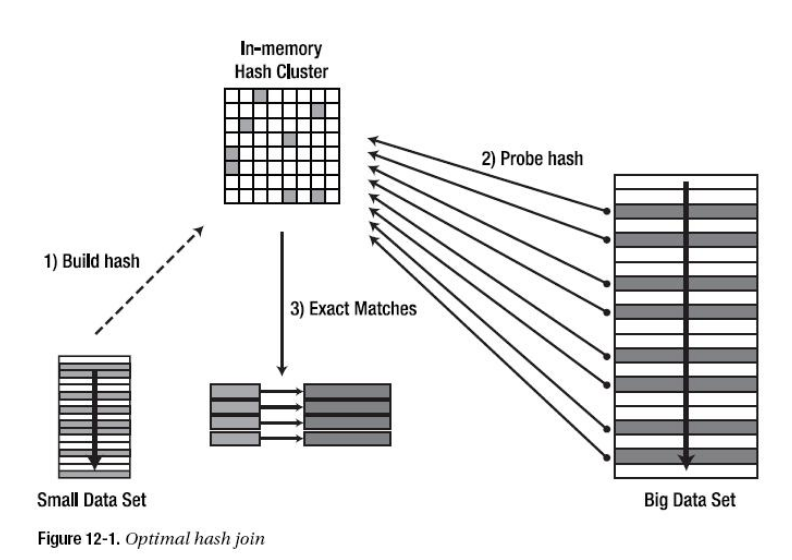
先看一张图片,大致了解Hash Join的过程:
下面详细了解一下Hash Join
㈠ Hash join概念
Hash join算法的一个基本思想就是根据小的row sources(称作build input 也就是前文提到的build table,我们记较小的表为S,较大的表为B)
建立一个可以存在于hash area内存中的hash table
然后用大的row sources(称作probe input,也就是前文提到的probe table) 来探测前面所建的hash table
如果hash area内存不够大,hash table就无法完全存放在hash area内存中
针对这种情况,Oracle在连接键利用一个hash函数将build input和probe input分割成多个不相连的分区
分别记作Si和Bi,这个阶段叫做分区阶段;然后各自相应的分区,即Si和Bi再做Hash join,这个阶段叫做join阶段
如果HASH表太大,无法一次构造在内存中,则分成若干个partition,写入磁盘的temporary segment,则会多一个写的代价,会降低效率
至于小表的概念,对于 hash join 来说,能容纳在 pga 中的 hash table 都可以叫小表,通常比如:
pga_aggregate_target big integer 1073741824
hash area size 大体能使用到40多 M ,这样的话通常可能容纳 几十万的记录
hash area size缺省是2*sort_area_size,我们可以直接修改SORT_AREA_SIZE 的大小,HASH_AREA_SIZE也会跟着改变的
如果你的workarea_size_policy=auto,那么我们只需设定pga_aggregate_target
但请记住,这是一个session级别的参数,有时,我们更倾向于把hash_area_size的大小设成驱动表的1.6倍左右
驱动表仅仅用于nested loop join 和 hash join,但Hash join不需要在驱动表上存在索引,而nested loop join则迫切需求
一两百万记录的表 join上 千万记录的表,hash join的通常表现非常好
不过,多与少,大与小,很多时候很难量化,具体情况还得具体分析
如果在分区后,针对某个分区所建的hash table还是太大的话,oracle就采用nested loop hash join
所谓的nested-loops hash join就是对部分Si建立hash table,然后读取所有的Bi与所建的hash table做连接
然后再对剩余的Si建立hash table,再将所有的Bi与所建的hash table做连接,直至所有的Si都连接完了
㈡ Hash Join原理
考虑以下两个数据集:
S={1,1,1,3,3,4,4,4,4,5,8,8,8,8,10}
B={0,0,1,1,1,1,2,2,2,2,2,2,3,8,9,9,9,10,10,11}
Hash Join的第一步就是判定小表(即build input)是否能完全存放在hash area内存中
如果能完全存放在内存中,则在内存中建立hash table,这是最简单的hash join
如果不能全部存放在内存中,则build input必须分区。分区的个数叫做fan-out
Fan-out是由hash_area_size和cluster size来决定的。其中cluster size等于db_block_size * _hash_multiblock_io_count
hash_multiblock_io_count是个隐藏参数,在9.0.1以后就不再使用了
-
sys@ORCL> ed
-
Wrote file afiedt.buf
-
-
1 select a.ksppinm name,b.ksppstvl value,a.ksppdesc description
-
2 from x$ksppi a,x$ksppcv b
-
3 where a.indx = b.indx
-
4* and a.ksppinm like '%hash_multiblock_io_count%'
-
sys@ORCL> /
-
-
NAME VALUE DESCRIPTION
-
------------------------------ ----- ------------------------------------------------------------
-
_hash_multiblock_io_count 0 number of blocks hash join will read/write at once
Oracle采用内部一个hash函数作用于连接键上,将S和B分割成多个分区
在这里我们假设这个hash函数为求余函数,即Mod(join_column_value,10)
这样产生十个分区,如下表:
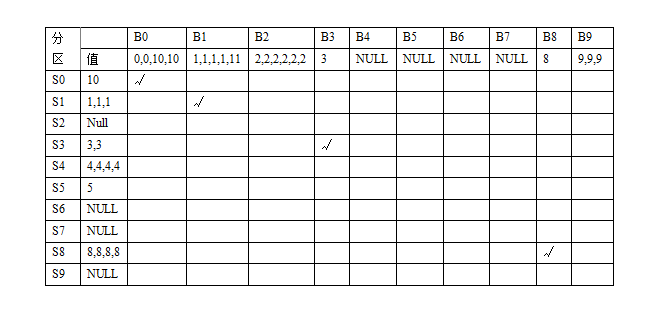
经过这样的分区之后,只需要相应的分区之间做join即可(也就是所谓的partition pairs)
如果有一个分区为NULL的话,则相应的分区join即可忽略
在将S表读入内存分区时,oracle即记录连接键的唯一值,构建成所谓的位图向量
它需要占hash area内存的5%左右。在这里即为{1,3,4,5,8,10}
当对B表进行分区时,将每一个连接键上的值与位图向量相比较,如果不在其中,则将其记录丢弃
在我们这个例子中,B表中以下数据将被丢弃{0,0,2,2,2,2,2,2,9,9,9,9,9}
这个过程就是位图向量过滤
当S1,B1做完连接后,接着对Si,Bi进行连接
这里oracle将比较两个分区,选取小的那个做build input,就是动态角色互换
这个动态角色互换发生在除第一对分区以外的分区上面
㈢ Hash Join算法
第1步:判定小表是否能够全部存放在hash area内存中,如果可以,则做内存hash join。如果不行,转第二步
第2步:决定fan-out数
(Number of Partitions) * C<= Favm *M
其中C为Cluster size,其值为DB_BLOCK_SIZE*HASH_MULTIBLOCK_IO_COUNT
Favm为hash area内存可以使用的百分比,一般为0.8左右
M为Hash_area_size的大小
第3步:读取部分小表S,采用内部hash函数(这里称为hash_fun_1)
将连接键值映射至某个分区,同时采用hash_fun_2函数对连接键值产生另外一个hash值
这个hash值用于创建hash table用,并且与连接键值存放在一起
第4步:对build input建立位图向量
第5步:如果内存中没有空间了,则将分区写至磁盘上
第6步:读取小表S的剩余部分,重复第三步,直至小表S全部读完
第7步:将分区按大小排序,选取几个分区建立hash table(这里选取分区的原则是使选取的数量最多)
第8步:根据前面用hash_fun_2函数计算好的hash值,建立hash table
第9步:读取表B,采用位图向量进行位图向量过滤
第10步:对通过过滤的数据采用hash_fun_1函数将数据映射到相应的分区中去,并计算hash_fun_2的hash值
第11步:如果所落的分区在内存中,则将前面通过hash_fun_2函数计算所得的hash值与内存中已存在的hash table做连接
将结果写致磁盘上。如果所落的分区不在内存中,则将相应的值与表S相应的分区放在一起
第12步:继续读取表B,重复第9步,直至表B读取完毕
第13步:读取相应的(Si,Bi)做hash连接。在这里会发生动态角色互换
第14步:如果分区过后,最小的分区也比内存大,则发生nested-loop hash join
㈣ Hash Join的成本
⑴ In-Memory Hash Join
Cost(HJ)=Read(S)+ build hash table in memory(CPU)+Read(B) + Perform In memory Join(CPU)
忽略cpu的时间,则:
Cost(HJ)=Read(S)+Read(B)
⑵ On-Disk Hash Join
根据上述的步骤描述,我们可以看出:
Cost(HJ)=Cost(HJ1)+Cost(HJ2)
其中Cost(HJ1)的成本就是扫描S,B表,并将无法放在内存上的部分写回磁盘,对应前面第2步至第12步
Cost(HJ2)即为做nested-loop hash join的成本,对应前面的第13步至第14步
其中Cost(HJ1)近似等于Read(S)+Read(B)+Write((S-M)+(B-B*M/S))
因为在做nested-loop hash join时,对每一chunk的build input,都需要读取整个probe input,因此
Cost(HJ2)近似等于Read((S-M)+n*(B-B*M/S)),其中n是nested-loop hash join需要循环的次数:n=(S/F)/M
一般情况下,如果n大于10的话,hash join的性能将大大下降
从n的计算公式可以看出,n与Fan-out成反比例,提高fan-out,可以降低n
当hash_area_size是固定时,可以降低cluster size来提高fan-out
从这里我们可以看出,提高hash_multiblock_io_count参数的值并不一定提高hash join的性能
㈤ Hash Join的过程
一次完整的hash join如下:
1 计算小表的分区(bucket)数--Hash分桶
决定hash join的一个重要因素是小表的分区(bucket)数
这个数字由hash_area_size、hash_multiblock_io_count和db_block_size参数共同决定
Oracle会保留hash area的20%来存储分区的头信息、hash位图信息和hash表
因此,这个数字的计算公式是:
Bucket数=0.8*hash_area_size/(hash_multiblock_io_count*db_block_size)
2 Hash计算
读取小表数据(简称为R),并对每一条数据根据hash算法进行计算
Oracle采用两种hash算法进行计算,计算出能达到最快速度的hash值(第一hash值和第二hash值)
而关于这些分区的全部hash值(第一hash值)就成为hash表
3 存放数据到hash内存中
将经过hash算法计算的数据,根据各个bucket的hash值(第一hash值)分别放入相应的bucket中
第二hash值就存放在各条记录中
4 创建hash位图
与此同时,也创建了一个关于这两个hash值映射关系的hash位图
5 超出内存大小部分被移到磁盘
如果hash area被占满,那最大一个分区就会被写到磁盘(临时表空间)上去
任何需要写入到磁盘分区上的记录都会导致磁盘分区被更新
这样的话,就会严重影响性能,因此一定要尽量避免这种情况
2-5一直持续到整个表的数据读取完毕
6 对分区排序
为了能充分利用内存,尽量存储更多的分区,Oracle会按照各个分区的大小将他们在内存中排序
7 读取大表数据,进行hash匹配
接下来就开始读取大表(简称S)中的数据
按顺序每读取一条记录,计算它的hash值,并检查是否与内存中的分区的hash值一致
如果是,返回join数据
如果内存中的分区没有符合的,就将S中的数据写入到一个新的分区中,这个分区也采用与计算R一样的算法计算出hash值
也就是说这些S中的数据产生的新的分区数应该和R的分区集的分区数一样。这些新的分区被存储在磁盘(临时表空间)上
8 完全大表全部数据的读取
一直按照7进行,直到大表中的所有数据的读取完毕
9 处理没有join的数据
这个时候就产生了一大堆join好的数据和从R和S中计算存储在磁盘上的分区
10 二次hash计算
从R和S的分区集中抽取出最小的一个分区,使用第二种hash函数计算出并在内存中创建hash表
采用第二种hash函数的原因是为了使数据分布性更好
11 二次hash匹配
在从另一个数据源(与hash在内存的那个分区所属数据源不同的)中读取分区数据,与内存中的新hash表进行匹配。返回join数据
12 完成全部hash join
继续按照9-11处理剩余分区,直到全部处理完毕
㈥ Hash Join的模式
Oracle中,Hash Join也有三种模式:optimal,one-pass,multi-pass
⑴ optimal
当驱动结果集生成的hash表全部可以放入PGA的hash area时,称为optimal,大致过程如下:
① 先根据驱动表,得到驱动结果集
② 在hash area生成hash bulket,并将若干bulket分成一组,成为一个partition,还会生成一个bitmap的列表,每个bulket在上面占一位
③ 对结果集的join键做hash运算,将数据分散到相应partition的bulket中
当运算完成后,如果键值唯一性较高的话,bulket里的数据会比较均匀,也有可能有的桶里面数据会是空的
这样bitmap上对应的标志位就是0,有数据的桶,标志位会是1
④ 开始扫描第二张表,对jion键做hash运算,确定应该到某个partition的某个bulket去探测
探测之前,会看这个bulket的bitmap是否会1,如果为0,表示没数据,这行就直接丢弃掉
⑤ 如果bitmap为1,则在桶内做精确匹配,判断OK后,返回数据
这个是最优的hash join,他的成本基本是两张表的full table scan,在加微量的hash运算
博客开篇的那幅图描述的也就是这种情况
⑵ one-pass
如果进程的pga很小,或者驱动表结果集很大,超过了hash area的大小,会怎么办?
当然会用到临时表空间,此时oracle的处理方式稍微复杂点需奥注意上面提到的有个partition的概念
可以这么理解,数据是经过两次hash运算的,先确定你的partition,再确定你的bulket
假设hash area小于整个hash table,但至少大于一个partition的size,这个时候走的就是one-pass
当我们生成好hash表后,状况是部分partition留在内存中,其他的partition留在磁盘临时表空间中
当然也有可能某个partition一半在内存,一半在磁盘,剩下的步骤大致如下:
① 扫描第二张表,对join键做hash运算,确定好对应的partition和bulket
② 查看bitmap,确定bulket是否有数据,没有则直接丢弃
③ 如果有数据,并且这个partition是在内存中的,就进入对应的桶去精确匹配,能匹配上,就返回这行数据,否则丢弃
④ 如果partition是在磁盘上的,则将这行数据放入磁盘中暂存起来,保存的形式也是partition,bulket的方式
⑤ 当第二张表被扫描完后,剩下的是驱动表和探测表生成的一大堆partition,保留在磁盘上
⑥ 由于两边的数据都按照相同的hash算法做了partition和bulket,现在只要成对的比较两边partition数据即可
并且在比较的时候,oracle也做了优化处理,没有严格的驱动与被驱动关系
他会在partition对中选较小的一个作为驱动来进行,直到磁盘上所有的partition对都join完
可以发现,相比optimal,他多出的成本是对于无法放入内存的partition,重新读取了一次,所以称为one-pass
只要你的内存保证能装下一个partition,oracle都会腾挪空间,每个磁盘partition做到one-pass
⑶ multi-pass
这是最复杂,最糟糕的hash join
此时hash area小到连一个partition也容纳不下,当扫描好驱动表后
可能只有半个partition留在hash area中,另半个加其他的partition全在磁盘上
剩下的步骤和one-pass比价类似,不同的是针对partition的处理
由于驱动表只有半个partition在内存中,探测表对应的partition数据做探测时
如果匹配不上,这行还不能直接丢弃,需要继续保留到磁盘,和驱动表剩下的半个partition再做join
这里举例的是内存可以装下半个partition,如果装的更少的话,反复join的次数将更多
当发生multi-pass时,partition物理读的次数会显著增加
㈦ Hash Join的位图
这个位图包含了每个hash分区是否有有值的信息。它记录了有数据的分区的hash值
这个位图的最大作用就是,如果probe input中的数据没有与内存中的hash表匹配上
先查看这个位图,以决定是否将没有匹配的数据写入磁盘
那些不可能匹配到的数据(即位图上对应的分区没有数据)就不再写入磁盘
㈧ 小结
① 确认小表是驱动表
② 确认涉及到的表和连接键分析过了
③ 如果在连接键上数据不均匀的话,建议做柱状图
④ 如果可以,调大hash_area_size的大小或pga_aggregate_target的值
⑤ Hash Join适合于小表与大表连接、返回大型结果集的连接
转载自:http://blog.csdn.net/dba_waterbin/article/category/1215758