一、项目背景
最近在做一个人脸检测项目,需要接入百度AI的系统进行识别和检测。主要流程就是往指定的URL上post图片上去,之后接收检测结果就好了。
百度的检测结果包含这样的信息:
left - 人脸区域离左边界的距离
top - 人脸区域离上边界的距离
width - 人脸区域的宽度
height - 人脸区域的高度
ratation 人脸框相对于竖直方向的顺时针旋转角[-180, 180].
如果我想把人脸框出来,很容易想到的是以(left, top)为左上顶点,以width 为宽,height为高,画一个矩形就好了。但其实这样是不合理的,如果人头是倒着的,这样画出来是不合理的。就像下面这样:
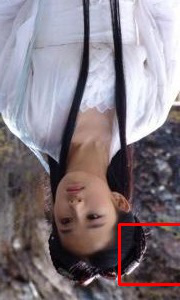
所以必须考虑把旋转角加上去。于是我想的策略是先把框画出来,再逆时针旋转ratation 就可以了。
二、如何旋转
大致策略就是:先算出四个点的左标,再以左上角的点为原点,逆时针旋转ratation 就ok了。四个点的左标比较容易确定,利用起点左标加宽高就能算出来。
这里主要讲解如何算旋转后的左标,如下图:
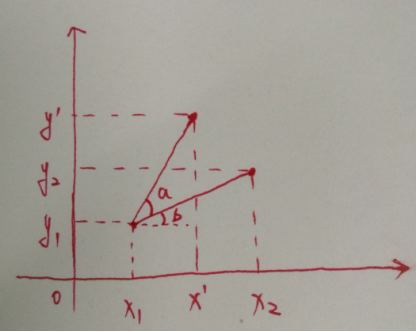
已知x1,x2,y1,y2和∠a,求x’,和y’。这时候就需要用到高中的三角函数的知识了。
假设,(x1, y1) 到 (x2, y2)的长度为r,再画一个∠b。
x’ = x1 + r * cos(a + b);
x’ = x1 + r * cos(a) * cos(b) - r * sin(a) * sin(b);
又因为:
r * cos(b) = x2 - x1;
r * sin(b) = (y2 - y1);
最终可以求出:
x’ = x1 + cos(a) * (x2 - x1) - sin(a) * (y2 - y1);
同理求出:
y’ = y1 + sin(a) * (x2 - x1) - cos(a) * (y2 - y1);
啊,这真是用了我毕生所学的数学知识,真没想到工作后还会用到三角函数的知识。还是要多学点数学知识才好啊。
三、源码
下面就是真正画图的东西了,为了测试这个公式是否可行,我用opencv画了一个四根线(其实就是一个方形),然后以左上角为顶点旋转。
下面的具体的代码,比较简单,主要是那个公式,所以也没什么注释。需要包含opencv头文件,以及链接opencv的库。
/* * @author:xcywt * @date:2018-08-10 * @contact me: https://www.cnblogs.com/xcywt/ */ #include<iostream> #include "opencv2/highgui/highgui.hpp" using namespace cv; #define PI 3.14159265 #define ROTATE_COUNT 180 int RotateTest2() { if (ROTATE_COUNT > 360) { return -1; } int x1 = 200, y1 = 200; int x2 = 300, y2 = 200; int x3 = 300, y3 = 300; int x4 = 200, y4 = 300; int arrX1[ROTATE_COUNT], arrY1[ROTATE_COUNT]; int arrX2[ROTATE_COUNT], arrY2[ROTATE_COUNT]; int arrX3[ROTATE_COUNT], arrY3[ROTATE_COUNT]; int arrX4[ROTATE_COUNT], arrY4[ROTATE_COUNT]; int nAgree = 0; for (int i = 0; i < ROTATE_COUNT; i++) { nAgree = i * (360 / ROTATE_COUNT); double dRot = nAgree * PI / 180; double dSinRot = sin(dRot), dCosRot = cos(dRot); arrX1[i] = x1; arrY1[i] = y1; arrX2[i] = x1 + dCosRot * (x2 - x1) - dSinRot * (y2 - y1); arrY2[i] = y1 + dSinRot * (x2 - x1) + dCosRot * (y2 - y1); arrX3[i] = x1 + dCosRot * (x3 - x1) - dSinRot * (y3 - y1); arrY3[i] = y1 + dSinRot * (x3 - x1) + dCosRot * (y3 - y1); arrX4[i] = x1 + dCosRot * (x4 - x1) - dSinRot * (y4 - y1); arrY4[i] = y1 + dSinRot * (x4 - x1) + dCosRot * (y4 - y1); } Mat im(800, 480, CV_8UC3); line(im, Point(x1, y1), Point(x2, y2), Scalar(89, 90, 90), 3); line(im, Point(x1, y1), Point(x4, y4), Scalar(89, 90, 90), 3); line(im, Point(x3, y3), Point(x2, y2), Scalar(89, 90, 90), 3); line(im, Point(x4, y4), Point(x3, y3), Scalar(89, 90, 90), 3); for (int i = 1; i < ROTATE_COUNT; i++) { line(im, Point(arrX1[i], arrY1[i]), Point(arrX2[i], arrY2[i]), Scalar(189, 255, 0), 1); line(im, Point(arrX1[i], arrY1[i]), Point(arrX4[i], arrY4[i]), Scalar(189, 255, 0), 1); line(im, Point(arrX3[i], arrY3[i]), Point(arrX2[i], arrY2[i]), Scalar(189, 255, 0), 1); line(im, Point(arrX4[i], arrY4[i]), Point(arrX3[i], arrY3[i]), Scalar(189, 255, 0), 1); } imshow("Is ok", im); cvWaitKey(0); return 0; } int RotateTest() { int nAgree = 170; double dRot = nAgree * PI / 180; double dSinRot = sin(dRot), dCosRot = cos(dRot); int x1 = 200, y1 = 200; int x2 = 300, y2 = 200; int x3 = 300, y3 = 300; int x4 = 200, y4 = 300; int x1_1 = x1, y1_1 = y1; int x2_1 = x1 + dCosRot * (x2 - x1) - dSinRot * (y2 - y1), y2_1 = y1 + dSinRot * (x2 - x1) + dCosRot * (y2 - y1); int x3_1 = x1 + dCosRot * (x3 - x1) - dSinRot * (y3 - y1), y3_1 = y1 + dSinRot * (x3 - x1) + dCosRot * (y3 - y1); int x4_1 = x1 + dCosRot * (x4 - x1) - dSinRot * (y4 - y1), y4_1 = y1 + dSinRot * (x4 - x1) + dCosRot * (y4 - y1); std::cout << "P1:(" << x1 << " , " << y1 << ") --> (" << x1_1 << ", " << y1_1 << ")" << std::endl; std::cout << "P2:(" << x2 << " , " << y2 << ") --> (" << x2_1 << ", " << y2_1 << ")" << std::endl; std::cout << "P3:(" << x3 << " , " << y3 << ") --> (" << x3_1 << ", " << y3_1 << ")" << std::endl; std::cout << "P4:(" << x4 << " , " << y4 << ") --> (" << x4_1 << ", " << y4_1 << ")" << std::endl; Mat im(800, 480, CV_8UC3); line(im, Point(x1, y1), Point(x2, y2), Scalar(89, 90, 90), 2); line(im, Point(x1, y1), Point(x4, y4), Scalar(89, 90, 90), 2); line(im, Point(x3, y3), Point(x2, y2), Scalar(89, 90, 90), 2); line(im, Point(x4, y4), Point(x3, y3), Scalar(89, 90, 90), 2); line(im, Point(x1_1, y1_1), Point(x2_1, y2_1), Scalar(189, 0, 0), 2); line(im, Point(x1_1, y1_1), Point(x4_1, y4_1), Scalar(189, 0, 0), 2); line(im, Point(x3_1, y3_1), Point(x2_1, y2_1), Scalar(189, 0, 0), 2); line(im, Point(x4_1, y4_1), Point(x3_1, y3_1), Scalar(189, 0, 0), 2); imshow("Is ok", im); cvWaitKey(0); return 0; } int main() { //RotateTest(); RotateTest2(); return 0; }
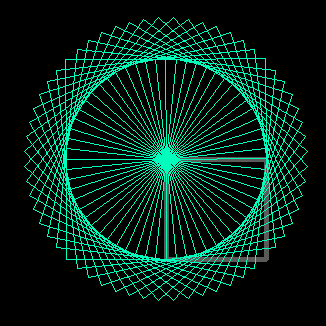
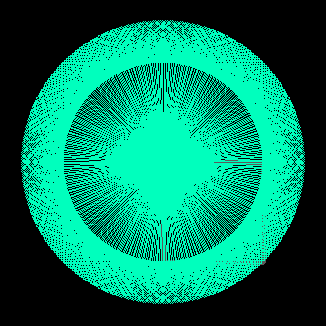
其中RotateTest2()实现了在一个Mat上,画出了旋转各个角度的样子,具体把360分成 ROTATE_COUNT这么多份。可以看到效果还是很好看的。
ROTATE_COUNT为10时:

ROTATE_COUNT为60时:
ROTATE_COUNT为180时:
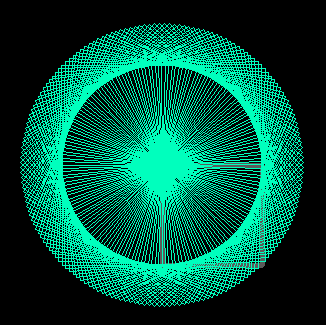
ROTATE_COUNT为360时:
旋转之后的神仙姐姐就框的比较准确了。这样就能正确的框住小姐姐了。

四、总结
数学还是很有用的。人工智能、深度学习还是需要具备数学知识的。