测量中粗差不可避免,但是常用的最小二乘估计却不具备抗干扰的能力,对含粗差的观测量相当敏感,因此如果拿最小二乘原理去处理韩有粗差的数据,会造成严重的后果。
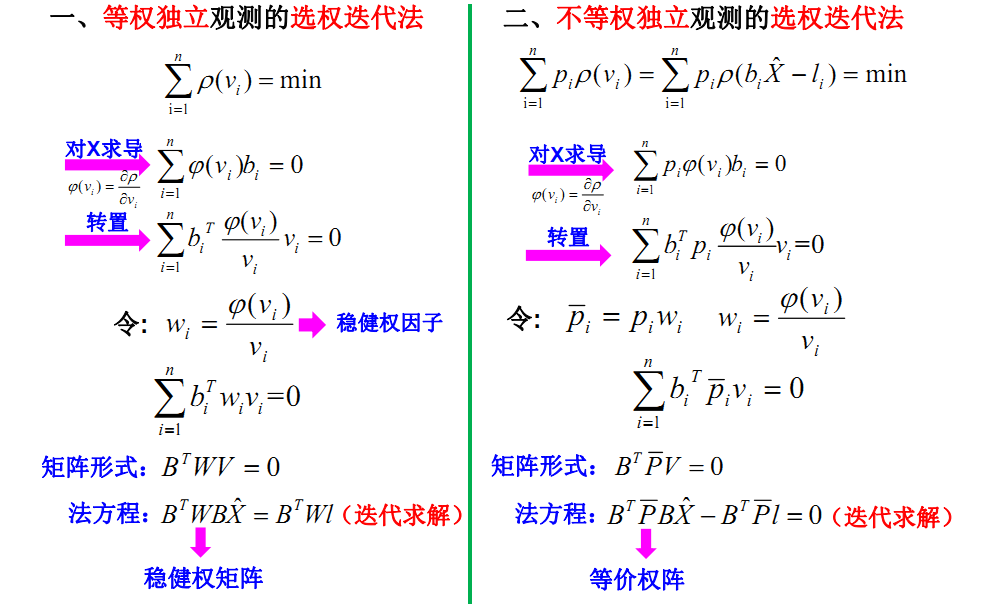
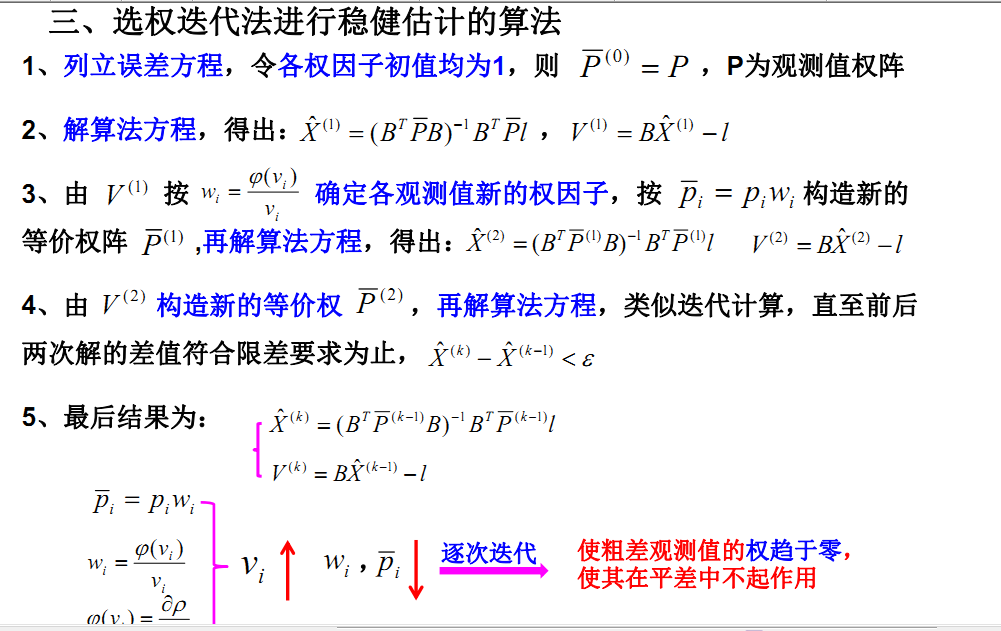
在现代广义平差测量中,常常使用稳健估计来探测和处理粗差,其中最经常用的就是就是M估计,这里p函数我选择Huber函数,来实现。
具体原理:
程序中我使用了我前两篇博客中的矩阵库和间接平差类。
using CMath; using System; using System.Collections.Generic; using System.Linq; using System.Text; using System.Threading.Tasks; namespace Adjust { /// <summary> /// 稳健估计,M估计 /// </summary> public static class Huber { /// <summary> /// 得到粗差剔除后的改正值 /// </summary> /// <param name="fun">观测方程</param> /// <param name="e">迭代精度</param> /// /// <param name="size">中误差调整系数</param> /// <returns>得到粗差剔除后的改正值</returns> public static Matrix GetHuber(LinearEquation fun,double size=1, double e=0.1) { //构造一个参数矩阵,默认为0 double[,] xite = new double[fun.B.Cols, 1]; for (int i = 0; i < xite.GetLength(0); i++) { xite[i,0] = 0.0; } Matrix Xite = new Matrix(xite); Matrix X = fun.GetNW(); //构造一个精度矩阵 double[,] eite=new double[fun.B.Cols,1]; for (int i = 0; i < eite.GetLength(0); i++) { xite[i,0] = e; } Matrix Eite = new Matrix(xite); //开始迭代 while (Matrix.MAbs(X - Xite) > Eite) { X = Xite; bool iserror = false; //包含含有粗差的索引 List<int> index = new List<int>(); //检测是否有粗差 //可能含有多个粗差 try { for (int i = 0; i < fun.GetV().Rows; i++) { if (Math.Abs(fun.GetV()[i, 0]) > size * fun.GetSigam()) { iserror = false; index.Add(i); } } } catch { throw new Exception("误差方程构造错误"); } //未含有粗差 if (iserror) break; //含有粗差 else { //调整观测权 //需要调整多个 for (int i = 0; i < index.Count; i++) { //这里使用Huber来改正权 fun.P[index[i], index[i]] = size*fun.GetSigam() / Math.Abs(fun.GetV()[index[i],0]); } } //重新解算 Xite = fun.GetNW(); } return Xite; } } }