帧间匹配算法
- 1、ICP匹配方法(略)
- 2、PL-ICP匹配方法
- 3、基于优化的匹配方法(catergtapher、Hecterslam)
- 4、相关匹配方法及分支定界加速(CSM,感觉了解下就行了)
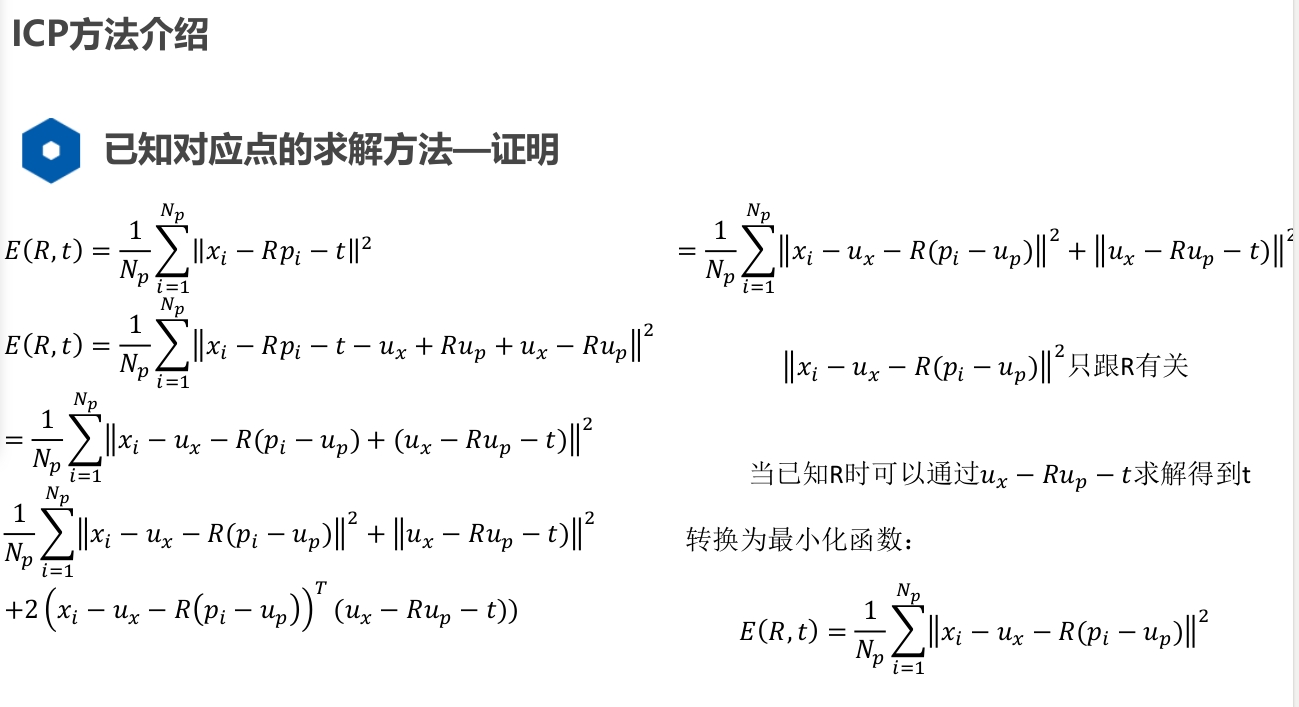
1、ICP匹配方法(略)
有关ICP的详细证明,参考《视觉SLAM十四讲》,书中没有证明的部分,我放到下面:

上面的数学可以再查下,暂时没看透彻
ICP算法是EM算法的一个特例,可以参考上一节:https://www.cnblogs.com/winslam/p/14892583.html
EM算法是一种求解非线性MLE的一种工具。
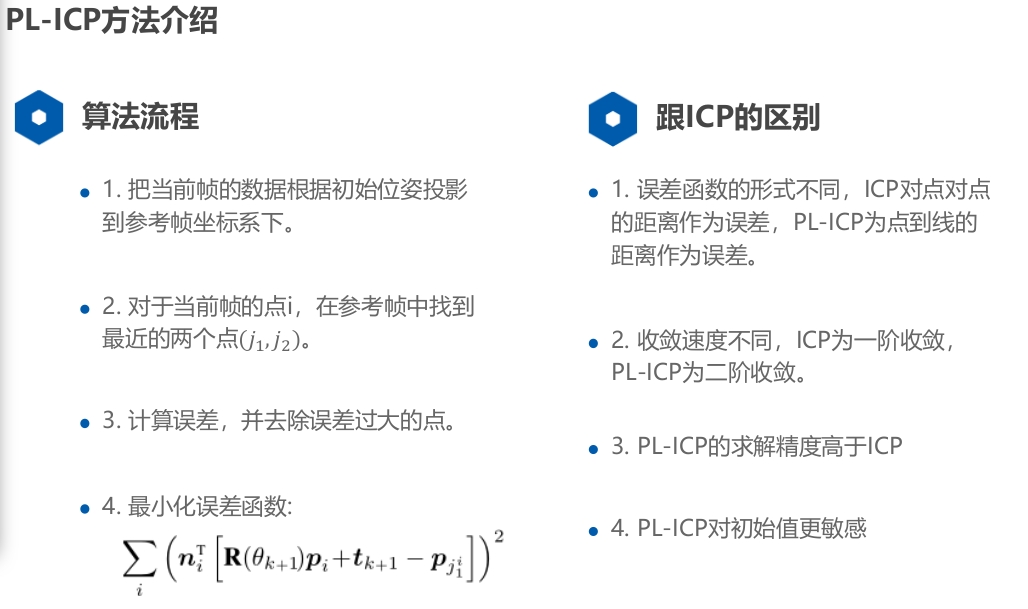
2、PL-ICP匹配方法
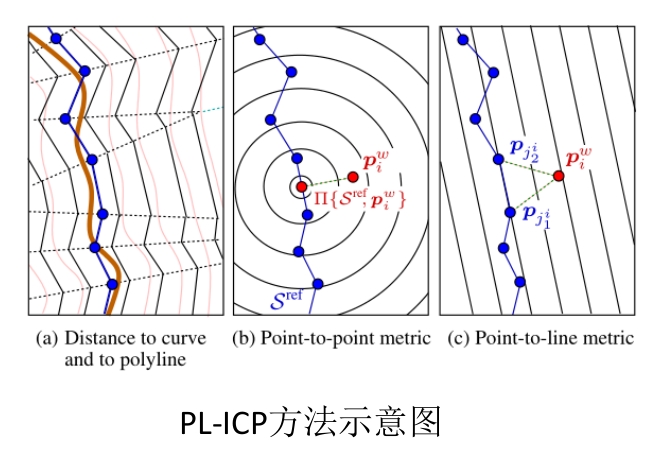
ICP是针对points to point,PL-ICP显然是points to line的算法。
例如:现在有两帧点云(参考帧点:Pj1、Pj2,当前帧点:Pi),ICP依据距离最近,认为 Pj2点和 Pi 匹配上了,但是由于机器人的运动,在空间中,Pj 点和 Pi 点并不严格对应目标物体上同一个点,所以还是会引入误差。
PL-ICP匹配策略不同,它是:依据点到线距离最近,例如:Pi点到 直线 Pj1-Pj2距离最短(当然直线的两个端点是依据距离最近得到),那么这种关系被视为最佳匹配。
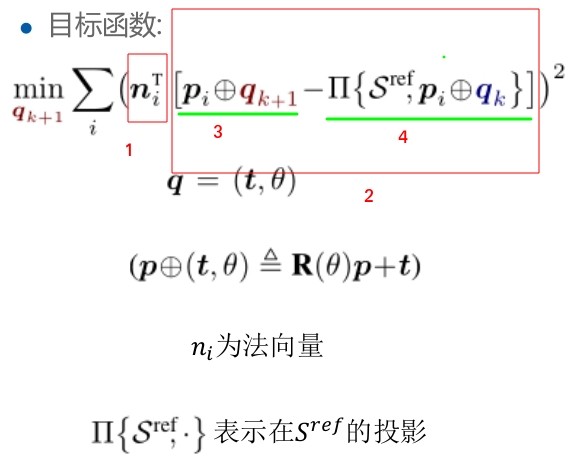
如下是PL-ICP点云配准目标函数,下面对标注的变量进行解释:
- 1、表示如下右图直线Pj2-Pj1的单位法向量;
- 2、表示向量Pi-Pj1(1与2之间其实是点积,公式中没写全,显然是求的是点Pi到直线Pj2-Pj1的距离,在RANSAC空间直线拟合的项目中用过的);
- 3、表示将Pi点从当前帧转到参考帧(qk+1表示位姿咯),当成如下右图Pi点
- 4、参考帧点,当成如下右图Pj1点
下面给出两种算法的区别,其实除了目标函数,其余没有区别。PL-ICP收敛更快。