一、工具
1、硬件:STM32L053R8单片机(HAL库)
2、编译环境:Atollic TrueSTUDIO for STM32 9.3.0
3、辅助工具:STM32CubeMX
二、电路设计
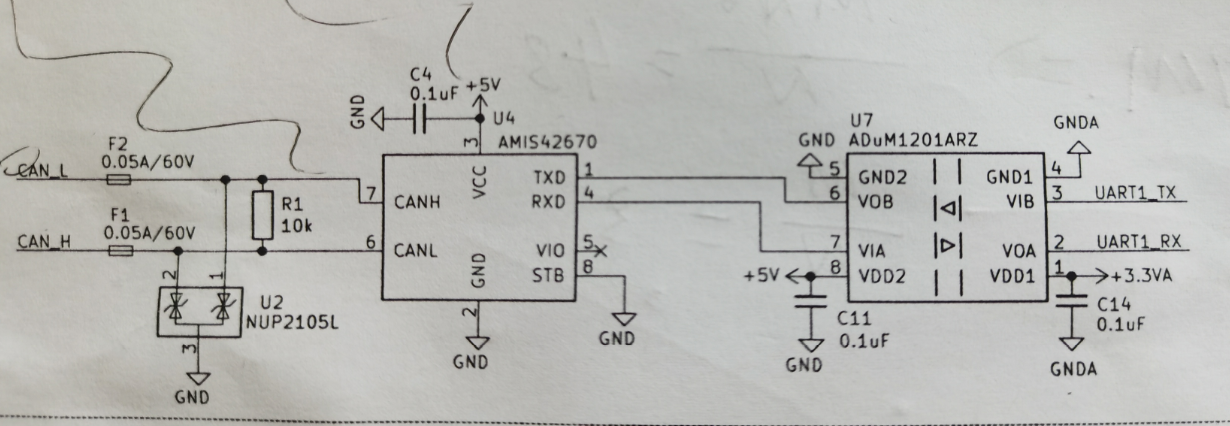
将UART信号转换成CAN信号以实现CAN通讯,如下图所示:
三、软件实现
1、定时器配置
定时器7的总线时钟是24MHz,该定时器用于判断串口是否接收完Modbus一帧数据。(配置定时器的时候要遵循Modbus的3.5个字符时间,比如:数据位是8位,起始和结束各1位,如果波特率是38400,则时长为:(3.5*10)/38400 ≈1ms)。
/* * bsp_tim7.c * * Created on: Dec 19, 2020 * Author: Mr.W */ #include "./tim/bsp_tim7.h"#include "cmsis_os.h" TIM_HandleTypeDef htim7; /* 串口接收到的数据长度 */ uint16_t data_length = 0; extern uint16_t r_count; static void error_handler(void) { while(1); } static void bsp_tim7_cfg(void) { TIM_MasterConfigTypeDef sMasterConfig = {0}; /* Peripheral clock enable */ __HAL_RCC_TIM7_CLK_ENABLE(); /* 定时器设定的是1ms延时产生一次中断 */ htim7.Instance = TIM7; htim7.Init.Prescaler = 23; htim7.Init.CounterMode = TIM_COUNTERMODE_UP; htim7.Init.Period = 999; htim7.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; if (HAL_TIM_Base_Init(&htim7) != HAL_OK) { error_handler(); } sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET; sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE; if (HAL_TIMEx_MasterConfigSynchronization(&htim7, &sMasterConfig) != HAL_OK) { error_handler(); } /* 清除中断 */ __HAL_TIM_CLEAR_IT(&htim7, TIM_IT_UPDATE); } void bsp_tim7_init(void) { /* TIM7 interrupt Init */ HAL_NVIC_SetPriority(TIM7_IRQn, 3, 0); HAL_NVIC_EnableIRQ(TIM7_IRQn); bsp_tim7_cfg(); } /** * @brief This function handles TIM22 global interrupt. */ void TIM7_IRQHandler(void) { HAL_TIM_IRQHandler(&htim7); } void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { if(htim->Instance == TIM7) { /* 关闭定时器 */ HAL_TIM_Base_Stop_IT(&htim7); /* 保存接收到的数据长度 */ data_length = r_count; /* 清空数据接收计数器 */ r_count = 0; xSemaphoreGive(xSemaphore); } }
/* * bsp_tim7.h * * Created on: Dec 19, 2020 * Author: Mr.W */ #ifndef TIM_BSP_TIM7_H_ #define TIM_BSP_TIM7_H_ #include "stm32l0xx_hal.h" void bsp_tim7_init(void); #endif /* TIM_BSP_TIM7_H_ */
2、串口配置
/* * bsp_uart1.c * * Created on: Dec 19, 2020 * Author: Mr.W */ #include "./uart/bsp_uart1.h" #include "./tim/bsp_tim7.h" UART_HandleTypeDef huart1; uint8_t r_data; /* 串口接收到的数据 */ uint16_t r_count = 0; uint8_t receive_buffer[256]; extern TIM_HandleTypeDef htim7; static void error_handler(void) { while(1); } static void bsp_uart1_gpio_cfg(void) { GPIO_InitTypeDef GPIO_InitStruct = {0}; __HAL_RCC_GPIOA_CLK_ENABLE(); /**USART1 GPIO Configuration PA9 ------> USART1_TX PA10 ------> USART1_RX */ GPIO_InitStruct.Pin = GPIO_PIN_9|GPIO_PIN_10; GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; GPIO_InitStruct.Alternate = GPIO_AF4_USART1; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); } static void bsp_uart1_cfg(void) { /* Peripheral clock enable */ __HAL_RCC_USART1_CLK_ENABLE(); huart1.Instance = USART1; huart1.Init.BaudRate = 38400 ; huart1.Init.WordLength = UART_WORDLENGTH_8B; huart1.Init.StopBits = UART_STOPBITS_1; huart1.Init.Parity = UART_PARITY_NONE; huart1.Init.Mode = UART_MODE_TX_RX; huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; huart1.Init.OverSampling = UART_OVERSAMPLING_16; huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE; huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT; if (HAL_UART_Init(&huart1) != HAL_OK) { error_handler(); } } void bsp_uart1_init(void) { /* USART1 interrupt Init */ HAL_NVIC_SetPriority(USART1_IRQn, 3, 0); HAL_NVIC_EnableIRQ(USART1_IRQn); bsp_uart1_gpio_cfg(); bsp_uart1_cfg(); HAL_UART_Receive_IT(&huart1, &r_data, 1); } /** * @brief This function handles USART1 global interrupt / USART1 wake-up interrupt through EXTI line 25. */ void USART1_IRQHandler(void) { HAL_UART_IRQHandler(&huart1); } /** * @brief Tx Transfer completed callback * @param UartHandle: UART handle. * @note This example shows a simple way to report end of IT Tx transfer, and * you can add your own implementation. * @retval None */ void HAL_UART_TxCpltCallback(UART_HandleTypeDef *UartHandle) { /* 串口接收使能 */ huart1.Instance->CR1 |= (1 << 2); } /** * @brief Rx Transfer completed callback * @param UartHandle: UART handle * @note This example shows a simple way to report end of IT Rx transfer, and * you can add your own implementation. * @retval None */ void HAL_UART_RxCpltCallback(UART_HandleTypeDef *UartHandle) { receive_buffer[r_count++] = r_data; /* 定时器计数器清零 */ __HAL_TIM_SET_COUNTER(&htim7, 0); /* 开启定时器 */ HAL_TIM_Base_Start_IT(&htim7); /* 打开接收中断 */ HAL_UART_Receive_IT(&huart1, &r_data, 1); } /** * @brief UART error callbacks * @param UartHandle: UART handle * @note This example shows a simple way to report transfer error, and you can * add your own implementation. * @retval None */ void HAL_UART_ErrorCallback(UART_HandleTypeDef *UartHandle) { }
/* * bsp_uart1.h * * Created on: Dec 19, 2020 * Author: Mr.W */ #ifndef UART_BSP_UART1_H_ #define UART_BSP_UART1_H_ #include "stm32l0xx_hal.h" void bsp_uart1_init(void); #endif /* UART_BSP_UART1_H_ */
3、Modbus协议实现
/* * modbus_rtu.c * * Created on: Dec 20, 2020 * Author: Mr.W */ #include "modbus_rtu.h" #include "./tim/bsp_tim7.h" #include "./uart/bsp_uart1.h" #include "cmsis_os.h" #define SLAVE_ADDR 1 extern UART_HandleTypeDef huart1; extern uint8_t receive_buffer[256]; uint8_t transfer_buffer[256]; extern uint16_t data_length; //////////////////////////////CRC16高位码表/////////////////////////////// const uint8_t auch_crc_hi[] = { 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40 }; ///////////////////////////////CRC16低位码表////////////////////////////// const uint8_t auch_crc_lo[] = { 0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06, 0x07, 0xC7, 0x05, 0xC5, 0xC4, 0x04, 0xCC, 0x0C, 0x0D, 0xCD, 0x0F, 0xCF, 0xCE, 0x0E, 0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09, 0x08, 0xC8, 0xD8, 0x18, 0x19, 0xD9, 0x1B, 0xDB, 0xDA, 0x1A, 0x1E, 0xDE, 0xDF, 0x1F, 0xDD, 0x1D, 0x1C, 0xDC, 0x14, 0xD4, 0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3, 0x11, 0xD1, 0xD0, 0x10, 0xF0, 0x30, 0x31, 0xF1, 0x33, 0xF3, 0xF2, 0x32, 0x36, 0xF6, 0xF7, 0x37, 0xF5, 0x35, 0x34, 0xF4, 0x3C, 0xFC, 0xFD, 0x3D, 0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A, 0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38, 0x28, 0xE8, 0xE9, 0x29, 0xEB, 0x2B, 0x2A, 0xEA, 0xEE, 0x2E, 0x2F, 0xEF, 0x2D, 0xED, 0xEC, 0x2C, 0xE4, 0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26, 0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0, 0x60, 0x61, 0xA1, 0x63, 0xA3, 0xA2, 0x62, 0x66, 0xA6, 0xA7, 0x67, 0xA5, 0x65, 0x64, 0xA4, 0x6C, 0xAC, 0xAD, 0x6D, 0xAF, 0x6F, 0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB, 0x69, 0xA9, 0xA8, 0x68, 0x78, 0xB8, 0xB9, 0x79, 0xBB, 0x7B, 0x7A, 0xBA, 0xBE, 0x7E, 0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4, 0x74, 0x75, 0xB5, 0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71, 0x70, 0xB0, 0x50, 0x90, 0x91, 0x51, 0x93, 0x53, 0x52, 0x92, 0x96, 0x56, 0x57, 0x97, 0x55, 0x95, 0x94, 0x54, 0x9C, 0x5C, 0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E, 0x5A, 0x9A, 0x9B, 0x5B, 0x99, 0x59, 0x58, 0x98, 0x88, 0x48, 0x49, 0x89, 0x4B, 0x8B, 0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C, 0x44, 0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42, 0x43, 0x83, 0x41, 0x81, 0x80, 0x40 }; void modbus_rtu_init(void) { /* 定时器用于获取modbus每一帧数据 */ bsp_tim7_init(); /* 串口用于modbus收发数据 */ bsp_uart1_init(); } uint16_t crc16(uint8_t *pdata, uint8_t length) { uint8_t crc_hi = 0xff; // CRC高位寄存器初始化 uint8_t crc_lo = 0xff; // CRC低位寄存器初始化 uint8_t index; // will index into CRC lookup table while(length--) // pass through message buffer { index = crc_hi ^ *pdata++; // calculate the CRC crc_hi = crc_lo ^ auch_crc_hi[index]; crc_lo = auch_crc_lo[index]; } return ((crc_hi<<8) | crc_lo); } static uint8_t modbus_rtu_slave_read_data( uint8_t slave_addr, /* 设备地址 */ uint8_t fun_code, /* 功能码 */ uint16_t reg_addr, /* 寄存器地址 */ uint16_t *pdata, /* 数据指针 */ uint8_t size) /* 数据大小 */ { uint16_t crc; uint8_t i; transfer_buffer[0] = slave_addr; transfer_buffer[1] = fun_code; transfer_buffer[2] = (size*2); if(pdata != NULL) { for(i = 0; i < size; i++) { taskENTER_CRITICAL(); transfer_buffer[(i << 1) + 3] = ((pdata[reg_addr + i]>>8)&0xFF); transfer_buffer[(i << 1) + 4] = (pdata[reg_addr + i]&0xFF); taskEXIT_CRITICAL(); } } crc = crc16(transfer_buffer, (size*2 + 3)); transfer_buffer[size*2 + 3] = (crc>>8)&0xFF; transfer_buffer[size*2 + 4] = crc&0xFF; /* 发送数据 */ HAL_UART_Transmit_IT(&huart1, transfer_buffer, (size*2 + 5)); return 0; } static uint8_t modbus_rtu_slave_write_data_response( uint8_t slave_addr, /* 设备地址 */ uint8_t fun_code, /* 功能码 */ uint16_t reg_addr, /* 寄存器地址 */ uint8_t size) /* 数据大小 */ { uint16_t crc; transfer_buffer[0] = slave_addr; transfer_buffer[1] = fun_code; transfer_buffer[2] = ((reg_addr>>8)&0xFF); transfer_buffer[3] = (reg_addr&0xFF); transfer_buffer[4] = ((size>>8)&0xFF); transfer_buffer[5] = (size&0xFF); crc = crc16(transfer_buffer, 6); transfer_buffer[6] = ((crc>>8)&0xFF); transfer_buffer[7] = (crc&0xFF); /* 发送数据 */ HAL_UART_Transmit_IT(&huart1, transfer_buffer, 8); return 0; } uint8_t modbus_rtu_slave_analysis_data(void) { uint8_t slave_addr; uint8_t fun_code; uint16_t reg_addr, length; uint16_t crc_value, crc_value2; uint8_t i; slave_addr = receive_buffer[0]; fun_code = receive_buffer[1]; reg_addr = ((receive_buffer[2] << 8) + receive_buffer[3]); length = ((receive_buffer[4] << 8) + receive_buffer[5]); if(slave_addr == SLAVE_ADDR) { crc_value = ((receive_buffer[data_length - 2] << 8) + receive_buffer[data_length - 1]); crc_value2 = crc16(receive_buffer, data_length - 2); if(crc_value != crc_value2) { return 0; } switch(fun_code) { case 0x03: /* 读多个保持寄存器 */ if((reg_addr >= MEASURE_START_ADDR) && ((reg_addr + length) <= (MEASURE_START_ADDR + sizeof(MEASURE_DATA_TYPE)/2))) { /* 关闭串口接收 */ huart1.Instance->CR1 &= ~(1 << 2); /* 响应并将数据发送给主机 */ modbus_rtu_slave_read_data(slave_addr, fun_code, (reg_addr - MEASURE_START_ADDR), mea_data.data, length); } else { return 0; } break; case 0x10: /* 写多个保持寄存器 */ if((reg_addr >= MEASURE_START_ADDR) && ((reg_addr + length) <= (MEASURE_START_ADDR + sizeof(MEASURE_DATA_TYPE)/2))) { /* 关闭串口接收 */ huart1.Instance->CR1 &= ~(1 << 2); for(i = 0; i < length; i++) { taskENTER_CRITICAL(); mea_data.data[reg_addr - MEASURE_START_ADDR + i] = (receive_buffer[i*2 + 7] << 8)|receive_buffer[i*2 + 8]; taskEXIT_CRITICAL(); } /* 响应主机 */ modbus_rtu_slave_write_data_response(slave_addr, fun_code, (reg_addr - MEASURE_START_ADDR), length); } else { return 0; } break; default: break; } } else { return 0; } return 0; }
/* * modbus_rtu.h * * Created on: Dec 20, 2020 * Author: Mr.W */ #ifndef MODBUS_RTU_H_ #define MODBUS_RTU_H_ #include "stm32l0xx_hal.h" void modbus_rtu_init(void); uint8_t modbus_rtu_slave_analysis_data(void); #endif /* MODBUS_RTU_H_ */
4、主函数
/** * @brief The application entry point. * @retval int */ int main(void) { /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* Initialize all configured peripherals */ MX_GPIO_Init(); /* modbus通讯初始化 */ modbus_rtu_init(); /* 创建二值信号量,初始信号资源为0 */ xSemaphore = xSemaphoreCreateBinary(); /* Create the thread(s) */ /* definition and creation of myTask01 */ osThreadDef(myTask01, StartTask01, osPriorityNormal, 0, 256); myTask01Handle = osThreadCreate(osThread(myTask01), NULL); /* Start scheduler */ osKernelStart(); /* We should never get here as control is now taken by the scheduler */ /* Infinite loop */ while (1) { } }
5、实现数据接收和发送
数据类型,需要自己补充。
#pragma pack(1) typedef union { uint16_t data[35]; struct { }param; }MEASURE_DATA_TYPE; #pragma pack()
MEASURE_DATA_TYPE mea_data;
/** * @brief Function implementing the myTask01 thread. * @param argument: Not used * @retval None */ void StartTask01(void const * argument) { /* Infinite loop */ for(;;) { /* 等待主机发送一帧数据 */ if(xSemaphoreTake(xSemaphore, (TickType_t)portMAX_DELAY ) == pdTRUE ) { /* 解析数据 */ modbus_rtu_slave_analysis_data(); } } }
#end