讲算法原理的有很多,直接贴代码
dijkstra算法是直接对邻接矩阵进行操作求出最短路径的,我项目中的图结构需要转化成邻接矩阵,所以会有下面代码
图结构是一个map,first表示节点的index,second是一个结构体,包含节点的详细信息
map<int, node> routeTable;
struct node { public: string ip; //节点的ip int port; //节点的端口 vector<OP_TYPE> ops; //节点支持的OP float overload; //节点的负载 bool status; // 节点的状态 int ncmIndex; //ncm index int reportCount; vector<pair<int,int>> adjacencyIndex; //邻接点的index及距离 };
所以需要根据这个map来生成一个邻接矩阵,dijkstra算法是从图的起点找出它与所有点的最短路径,而我的需求是给定两个点求他们在图上的最短距离,所以生成邻接矩阵不能按map本来的顺序去生成,需要将输入的两个点作为邻接矩阵的第一个点和最后一个点。举例来说如果原来节点的顺序是[0,1,2,3,4,5,6],我们想求2和4在图上的最短距离,那么就需要将map便利的顺序变成[2,0,1,3,5,6,4]
生成邻接矩阵
std::vector<std::vector<int>> GlobalRouteTable::getRouteAdjacentMatrix( int startNodeIndex, int endNodeIndex) { std::vector<int> graphNodeOrder = {}; // 将startNodeIndex和endNodeIndex对应的点作为图遍历的起点和重点 // if(routeTable.find(startNodeIndex)==routeTable.end()||routeTable.find(endNodeIndex)==routeTable.end()) graphNodeOrder.push_back(startNodeIndex); for (auto it : routeTable) { if (it.first != startNodeIndex && it.first != endNodeIndex && it.second.adjacencyIndex[0].first != -1) graphNodeOrder.push_back(it.first); } graphNodeOrder.push_back(endNodeIndex); std::vector<std::vector<int>> adjacent_matrix; // 初始化邻接矩阵 for (size_t i = 0; i < graphNodeOrder.size(); ++i) { std::vector<int> matrix_line = {}; for (size_t j = 0; j < graphNodeOrder.size(); ++j) matrix_line.push_back(65535); adjacent_matrix.push_back(matrix_line); } // 对角线0 for (size_t i = 0; i < graphNodeOrder.size(); ++i) adjacent_matrix[i][i] = 0; for (size_t i = 0; i < graphNodeOrder.size(); ++i) { for (auto j : routeTable[graphNodeOrder[i]].adjacencyIndex) { int tmp_index = 0; for (auto k = graphNodeOrder.begin(); k != graphNodeOrder.end(); ++k) { if (*k != j.first) tmp_index += 1; else break; } adjacent_matrix[i][tmp_index] = j.second; } } return adjacent_matrix; }
求最短路径
int GlobalRouteTable::dijsktra(std::vector<std::vector<int>> &&graph_matrix) { // init // 目标点到其他点的距离 std::vector<int> dist = {}; // 是否找到最短路径 std::vector<bool> target = {}; // 初始化图的第一个节点并录入与之相邻的节点的距离 for (size_t i = 0; i < graph_matrix.size(); ++i) { dist.push_back(graph_matrix[0][i]); target.push_back(false); } target[0] = true; int min, k; // start search for (size_t i = 1; i < graph_matrix.size(); ++i) { min = 65535; for (size_t j = 1; j < graph_matrix.size(); ++j) { if (!target[j] && min > dist[j]) { min = dist[j]; // 确定下一个要搜索的点 k = j; } } target[k] = true; for (size_t j = 1; j < graph_matrix.size(); ++j) { if (!target[j] && dist[j] > dist[k] + graph_matrix[k][j]) { dist[j] = dist[k] + graph_matrix[k][j]; } } } return dist[dist.size() - 1]; }
函数调用
int GlobalRouteTable::getNodeDist(int startNodeIndex, int endNodeIndex) { if (startNodeIndex == endNodeIndex) return 0; return dijsktra(std::move(getRouteAdjacentMatrix(startNodeIndex, endNodeIndex))); }
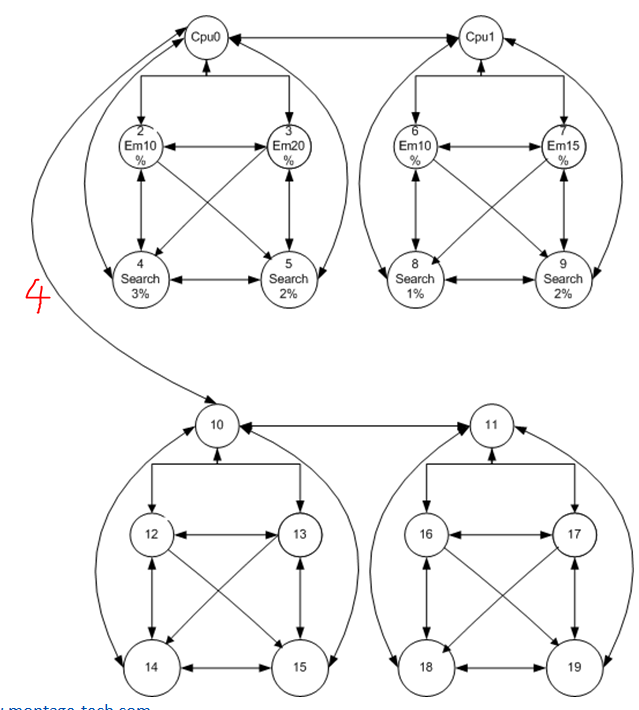
图结构
除了标记的变长是4,其余的边长都是1
测试用例
#include "../../src/routeTable.h" #include <gtest/gtest.h> TEST(routetableTest, checkGetDist) { auto ptr = GlobalRouteTable::GetInstance(); std::cout << "load table result: " << ptr->loadRouteTable() << std::endl; // ASSERT_EQ(ptr->getNodeDist(0, 0), 0); ASSERT_EQ(ptr->getNodeDist(0, 1), 1); ASSERT_EQ(ptr->getNodeDist(0, 2), 1); ASSERT_EQ(ptr->getNodeDist(2, 1), 2); ASSERT_EQ(ptr->getNodeDist(2, 3), 1); ASSERT_EQ(ptr->getNodeDist(2, 6), 3); ASSERT_EQ(ptr->getNodeDist(0, 10), 4); ASSERT_EQ(ptr->getNodeDist(0, 11), 5); ASSERT_EQ(ptr->getNodeDist(1, 11), 6); ASSERT_EQ(ptr->getNodeDist(0, 12), 5); ASSERT_EQ(ptr->getNodeDist(0, 16), 6); ASSERT_EQ(ptr->getNodeDist(2, 12), 6); ASSERT_EQ(ptr->getNodeDist(2, 16), 7); ASSERT_EQ(ptr->getNodeDist(6, 16), 8); } int main(int argc, char **argv) { ::testing::InitGoogleTest(&argc, argv); return RUN_ALL_TESTS(); }