runxinzhi.com
首页
百度搜索
React传值(子传父,父传子)
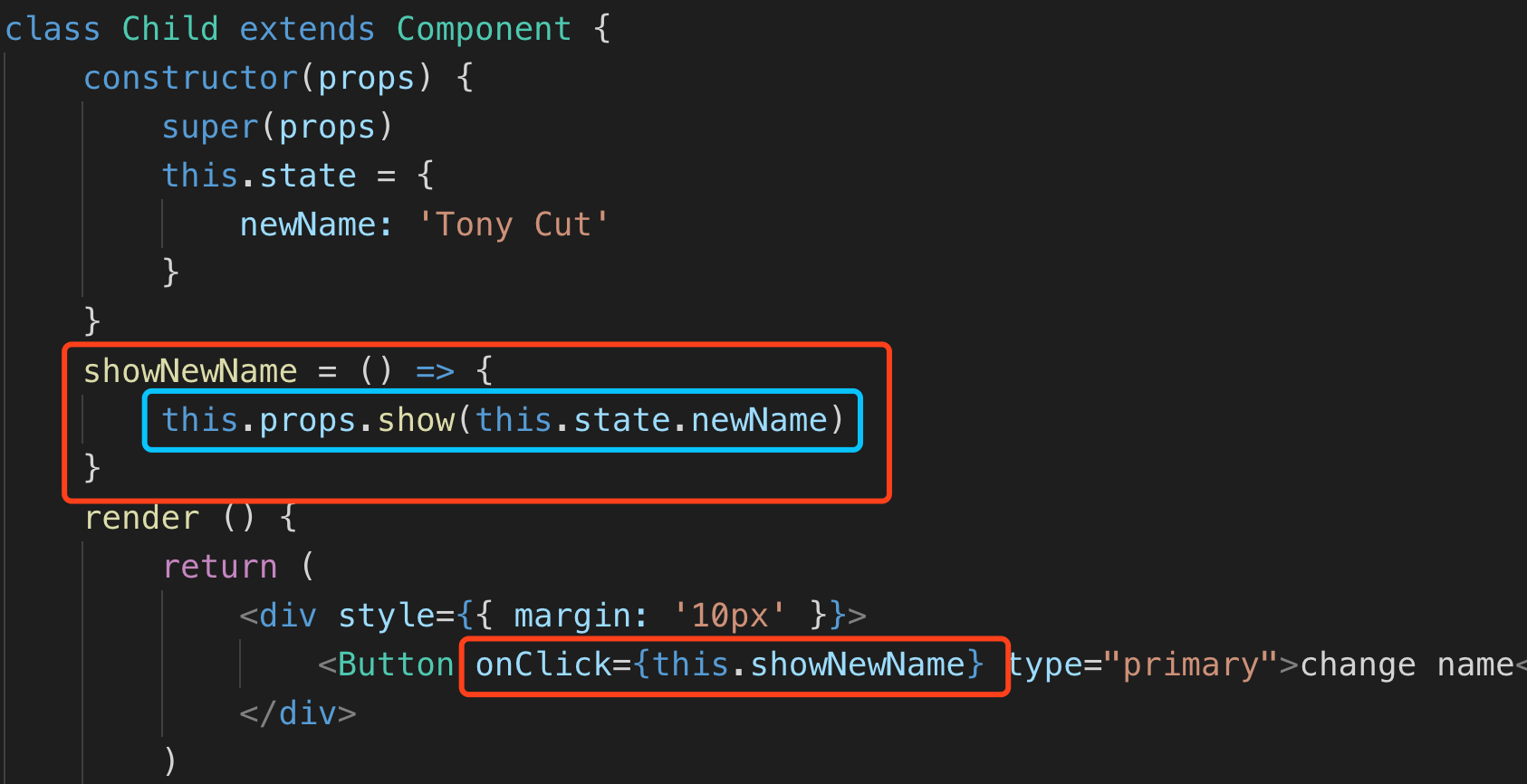
1.子传父
子组件事件调用父组件事件,将State或其他值当成参数传过去,父组件调用该参数,达到传值的效果
2.父传子
利用props属性传值,this.props.data
相关阅读:
基于ROS-Unity的移动机器人虚实交互场景构建方法的研究
ROS连接ABB机械臂调试详细教程-ROS(indigo)和ABB RobotStudio 6.03.02-
ROS#资讯汇总(ROS、C#、.NET和Unity3D)
论文阅读:A review and comparison of ontology-based approaches to robot autonomy ALBERTO
商业RDF三元组数据库AllegroGraph
Qt编写的项目作品30-录音播放控件(雨田哥作品)
Qt编写的项目作品29-RTSP播放器+视频监控(海康SDK版本)
Qt编写的项目作品28-RTSP播放器+视频监控(mpv版本)
Qt音视频开发23-通用视频控件
Qt音视频开发22-通用GPU显示
原文地址:https://www.cnblogs.com/vancissell/p/12367179.html
最新文章
SQL SERVER 下,批量在不同的数据库中执行相同的脚本
解决使用代理时 Windows 10 UWP 应用无法联网问题
快来看看python笔试题,你是真的懂python还是python外行?
MongoDB 查询文档
MongoDB 删除文档
MongoDB 更新文档
MongoDB 插入文档
MongoDB 删除集合
MongoDB 创建集合
SVN: is scheduled for addition, but is missing
热门文章
Failed to load libEGLd (内存资源不足,无法处理此命令。)
libpng warning: iCCP: known incorrect sRGB profile
使用ps画纯色背景图
自定义结构体以及重载等于
Qt在线安装
论文阅读:Bootstrapping Humanoid Robot Skills by Extracting Semantic Representations of Human-like Activities from Virtual Reality
论文阅读:A survey on semantic-based methods for the understanding of human movements
论文阅读:Purposive learning: Robot reasoning about the meanings of human activities
Protégé基本教程【Protégé5.5.0版本】
From ROS to Unity: leveraging robot and virtual environment middleware for immersive teleoperation
Copyright © 2020-2023
润新知