提供不同进程间或给定的一个特定进程的不同线程间的同步手段。
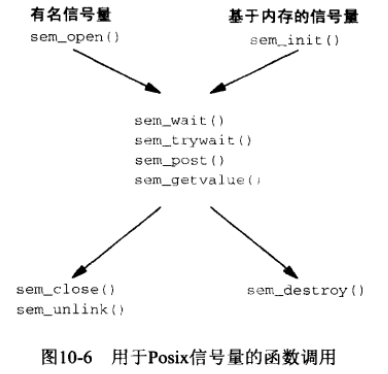
- Posix有名信号量,由IPC名字标识,通常指代文件系统中的某个文件,但不要求真正存放在文件系统的某个文件中(如果信号量的实现用到了映射文件);随内核持续,可用于进程或线程间的同步
- Posix基于内存的信号量,放在共享内存中,同步多线程时,可以放到该多线程所属进程空间里;如果是同步多进程,那就需要把信号灯放入到共享内存中(方便多个进程访问)。随进程持续
有名信号灯和基于内存的信号灯,具体区别体现在创建和销毁两个函数。有名信号灯使用sem_open和sem_close函数。基于内存的信号灯使用sem_init和sem_destroy函数。sem_init的参数可以控制是同步多线程,还是多进程;且该函数只能调用1次,因为调用后信号灯就存在了( 内存指针存在)。一般,使用基于内存的信号灯同步同进程多线程,使用有名信号灯同步多进程。
- 创建(create)一个信号量。要求调用者指定初始值。通常初始值为0或1的称作二值信号量,初始值为N(N>=0)的称作计数信号量,N指示可用的资源数(比如说缓冲区个数)。
- 等待(wait)一个信号量。该操作测试信号量的值。如果它的值大于0,则将值减1;如果它的值小于或等于0,则阻塞等待其值变为大于0,然后将值减1。
- 挂起(post)一个信号量。该操作将信号量的值加1。
生产者与消费者模型:
只有一个生产者和消费者线程,而且它们只共享一个缓冲区。它们之间的行为被彼此约束: 生产者只有在缓冲区中的数据被消费者处理后(缓冲区为空)才能放入新的数据。消费者只有在缓冲区已被生产者放入数据后(缓冲区不为空)才能处理数据。对生产者而言,缓冲区为空表示有资源可用。对消费者而言,缓冲区不为空表示有资源可用。
需要使用两个信号量get和put,因为初始缓冲区为空,所以我们把put的初始值置为1表示生产者的可用资源数为1,把get的初始值置为0表示消费者的初始可用资源数为0,消费者先运行

互斥锁、条件变量区信号量别
- 互斥锁必须总是由锁住他的线程解锁,信号量的挂出不必由执行过它的等待操作的同一线程执行
- 互斥锁要么被锁住要没被解开
- 既然信号量有一个与之关联的状态(它的计数值)那么信号量的挂出总是被记住,然而向一个条件变量上发送信号时,如果没有线层等待该条件变量那么信号将丢失
互斥锁和信号量是为线程间的同步机制说明。信号量为进程间的同步机制说明,这些进程可能共享也可能不共享某个内存区域。但信号量也可用同步线程,互斥锁条件变量也可用于同步进程。
有名信量
一个信号量的状态可能包含在它本身的sem_t数据类型中,还包含其他的信息(如:文件描述符),知道该标识符的任何进程都可以访问该信号量,它的整数标识符只是告诉内核具体引用哪个信号量
即使对于某个特定的名字sem_open调用在每个进程中可能返回不同的指针,使用该指针的信号量函数(sem_post,sem_wait)引用的任然是同一个信号量
sem_open
创建并初始化信号灯,返回值:成功时,返回信号灯的指针,错误返回SEM_FAILED
#include <semaphore.h> sem_t * sem_open(const char * name,int oflag,mode_t mode,unsigned int value); sem_t * sem_open(const char * name,int oflag);
- name是给信号灯指定一个名字
- oflag的值为O_CREAT,表示如果信号灯不存在,创建信号灯,若存在并不返回一个错误;为O_CREAT|O_EXCL,如果信号灯不存在报错。
- 后面两个参数,只有新建信号灯时使用。mode为信号灯的权限(0644),value为信号灯的值,该值不能超过SEM_VALUE_MAX(至少为32767),二值信号量的初值为1,计数信号量的初值往往大于一。
默认都具备读写权限不需要指定O_RNONLY 和O_WRONLY,因为信号量的挂出与等待操作都要改变信号量的值,不具备读写权限的信号量会导致sem_open返回EACCES(访问权限不符合)
sem_close
进程终止时(自愿exit,_exit或非自愿接收到一个信号)内核对其上仍打开的所有有名信号量自动执行信号量关闭操作。
#include <semaphore.h>
int sem_close(sem_t * sem)
成功时返回0;失败,-1
每个信号灯有一个引用计数器记录当前打开次数.关闭一个信号灯并没有将它从系统中删除因为他是随内核持续的,而是信号灯引用计数减1,即时当前没有进程打开信号量,它的值仍然保持。
sem_unlink
信号灯引用计数为大于0时,name从系统中删除,而其信号量的析构要等到最后一个sem_close发生。
返回值:成功时,返回0,失败,-1,需要显示调用
#include <semaphore.h> int sem_close(const char *name)
sem_wait/sem_trywait
sem_wait测试所指信号量的值,若大于0将它减一立刻返回,如果等于0,调用的线程会被投入睡眠,直到该值大于0这时在将它减一,随后返回。(测试减一是原子操作)
sem_trywait与sem_wait的区别是:当所指信号量的值为0时,不将调用线程投入睡眠。返回EAGAIN错误。
如果某个信号量被中断。sem_wait可能尽早的返回,返回的错误为EINTR。
#include <semaphore.h> int sem_wait(sem_t *sem) int sem_trywait(sem_t *sem)
sem_getvalue
获得信号灯当前值。参数:sem为信号灯指针,valp为信号灯的值
返回值:返回0或某个负数。如果当前信号量以上锁,其绝对值等于等待该信号量解锁的线程数。
#include <semaphore.h> int sem_getvalue(sem_t *sem,int *valp)
sem_post
返回值:成功时,返回0,失败,-1
任何线程都可以挂出一个信号(比如值由0增加为1),即使当前没有线程在该信号上阻塞;然而如果某个线程调用pthread_cond_signal,当时没有任何线程阻塞在pthread_cond_wait上时,那么发送相应的条件变量的信号将丢失。
在各种同步技巧(互斥锁、条件变量、读写锁、信号量)中,能够在信号处理程序中安全调用的唯一函数时sem_post。
#include <semaphore.h>
int sem_post(sem_t *sem)
总结:
- 当某个进程持有信号量的锁时进程没有释放他就终止,内核并不给信号量解锁,这与锁不同,当进程持有某个记录的锁没有释放就终止,内核自动释放。
- 能够从信号处理程序中安全调用的唯一函数时sem_post,互斥锁是为上锁而优化,条件变量为等待而优化,信号量即可用于上锁,也可用于等待,01信号量就相当于互斥锁
- 如果一个以上的线程在信号灯上等待,sem_post将唤醒其中一个(优先级最高的或最早等待的线程),如果没有线程在等待,信号灯计数器被加一。
- 假如有个代码段,期望最多有两个线程同时在里面执行(其他线程必须等待),可以使用一个信号灯而不需要附加任何状态,初始化信号灯值为2,然后再代码段开始调用sem_wait,结尾处调用sem_post,然后两个线程可以再信号登上等待而不被阻塞。
- sem_open,在父进程中打开的信号量在子进程中仍然打开
生产者与消费者问题:
#include "unpipc.h" #define BUFF 10 #define SEM_MUTEX "/tmpmutex" #define SEM_NEMPTY "/tmpnempty" #define SEM_NSTORED "/tmpnstored" struct shared { int buffer[BUFF]; sem_t *mutex,*nempty,*nstored; }shared; void *produce(void *arg) { int i; for(i=0;i<BUFF;++i) { sem_wait(shared.nempty); sem_wait(shared.mutex); shared.buffer[i%BUFF]=i; sem_post(shared.mutex); sem_post(shared.nstored); } return NULL; } void *consume(void *arg) { int i; for(i=0;i<BUFF;++i) { sem_wait(shared.nstored);//这两个wait交换会造成死锁 sem_wait(shared.mutex); printf("shared.buffer[%d]= %d ",i,shared.buffer[i%BUFF]); sem_post(shared.mutex); sem_post(shared.nempty); } return NULL; } int main() { pthread_setconcurrency(2); pthread_t pid_consume,pid_produce; /*每个信号量都需要正确的初始化,如果先前建立的信号里因本程序终止没有 * 删除,那么,可以在sem_open之前调用sem_unlink,并忽略任何错误,也 * 可以指定O_EXCL,检查是否返回EEXIST错误,若是,调用sem_unlink,并 * 且再次调用sem_open。如果想验证本程序只有一个副本在运行,可以调用 * fcntl文件锁 */ shared.mutex=sem_open(SEM_MUTEX,O_CREAT|O_EXCL,FILE_MODE,1); shared.nempty=sem_open(SEM_NEMPTY,O_CREAT|O_EXCL,FILE_MODE,BUFF); shared.nstored=sem_open(SEM_NSTORED,O_CREAT|O_EXCL,FILE_MODE,BUFF); pthread_create(&pid_produce,NULL,produce,NULL); pthread_create(&pid_consume,NULL,consume,NULL); pthread_join(pid_produce,NULL); pthread_join(pid_consume,NULL); sem_unlink(SEM_MUTEX); sem_unlink(SEM_NEMPTY); sem_unlink(SEM_NSTORED); exit(0); }
基于内存的信号量
#include <semaphore.h> int sem_init(sem_t * sem,int shared,unsigned int value); int sem_destroy(sem_t * sem)
sem为指向应用程序必须分配的sem_t变量,shared是指同步多线程还是多进程(0:同一进程间的线程共享;其他:进程间共享,该信号量必须放在在某个类型的共享内存中,而即将使用他的所有进程都要能访问共享内存),value为信号量值
返回值:成功时,不返回0,失败时,返回-1
注意:
- 必须保证该函数只调用一次,对一个已经初始化的信号量调用sem_init结果是未定义的。
- sem_open与sem_init:前者返回一个指向某个sem_t变量的指针,该变量由sem_open函数本身分配并初始化;后者的第一个参数时指向某个sem_t变量的指针,该变量由调用者分配,然后由sem_int初始化
- 一个基于内存的信号量,只有sem_init的参数指向的位置可用于访问该信号量,使用他的sem_t数据类型副本访问时为定义的结果
- 它的持续性取决于信号量存放的内存区域类型,只要某个基于内存的信号量的内存区保持有效,该信号量就一直存在,随进程持续,进程终止其消失
- fork的子进程通常不共享父进程内存空间,所以不能用sem_init(因为只有sem_init指向的位置才可以访问该信号量)
多个生产者单个消费者
#include "unpipc.h" #include <pthread.h> #include <string.h> #define BUFF 10 struct shared { struct buff { char data[BUFFSIZE]; size_t n; }buffer[BUFF]; sem_t mutex,nempty,nstored; }shared; int fd; void *produce(void *arg) { int i=0; while(1) { //printf("fd is:%d ",fd); sem_wait(&shared.nempty); sem_wait(&shared.mutex); //如果数据缓冲区要是在一个连表上维护,此处是链表中移除某个缓冲区的 //地方,把该操作放在临界区是避免生产者消费者对链表操作发生冲突 sem_post(&shared.mutex); shared.buffer[i].n=read(fd,shared.buffer[i].data,BUFFSIZE); if(shared.buffer[i].n==0)//读取结束 { sem_post(&shared.nstored); return NULL; } if(++i>=BUFF) i=0;//循环缓冲 sem_post(&shared.nstored); } return NULL; } void *consume(void *arg) { int i=0; while(1) { sem_wait(&shared.nstored); sem_wait(&shared.mutex); //同上 sem_post(&shared.mutex); if(shared.buffer[i].n==0) return NULL; write(1,shared.buffer[i].data,shared.buffer[i].n); if(++i>BUFF) i=0; sem_post(&shared.nempty); } return NULL; } int main() { printf("请输入文件名 "); char pathname[100]; fgets(pathname,100,stdin); int len=strlen(pathname); if(pathname[len-1]==' ') pathname[len-1]='�'; fd=open(pathname,O_RDONLY); //printf("pathname:%s",pathname); //printf("fd is main: %d ",fd); sem_init(&shared.mutex,0,1); sem_init(&shared.nempty,0,BUFF); sem_init(&shared.nstored,0,0); pthread_setconcurrency(2); pthread_t pid_produce,pid_consume; pthread_create(&pid_consume,NULL,consume,NULL); pthread_create(&pid_produce,NULL,produce,NULL); //pthread_create(&pid_consume,NULL,consume,NULL); pthread_join(pid_produce,NULL); pthread_join(pid_consume,NULL); sem_destroy(&shared.mutex); sem_destroy(&shared.nempty); sem_destroy(&shared.nstored); exit(0); }
代码github:https://github.com/tianzengBlog/test/tree/master/ipc2/sem
多个生产者多个消费者
在有多个消费者的情形下,消费者验证数据使用的数组下标和数据值都变成共享的,需要使用互斥锁保护。为了方便,我们还是只使用一个互斥锁mutex。为消费者我们新增了3个变量nget、ngetval和nconsumers。
要注意的还是生产者线程终止时的行为,我们新增了一个挂起nstored信号量的操作。因为所有的数据都验证完时nstored值为0,所有的消费者线程都在阻塞等待nstored信号量,如果不挂起nstored信号量,那么所有的消费者线程都会永远阻塞。
#include "unpipc.h" #define NBUFF 10 #define MAXNTHREADS 100 int nitems, nproducers, nconsumers; struct { int buff[NBUFF]; int nput; int nputval; int nget; int ngetval; sem_t mutex, nempty, nstored; } shared; void *produce(void *); void *consume(void *); int main(int argc, char **argv) { int i, prodcount[MAXNTHREADS], conscount[MAXNTHREADS]; pthread_t tid_produce[MAXNTHREADS], tid_consume[MAXNTHREADS]; if (argc != 4) err_quit("usgae: prodcons4 <#items> <#producers> <#consumers>"); nitems = atoi(argv[1]); nproducers = min(atoi(argv[2]), MAXNTHREADS); nconsumers = min(atoi(argv[3]), MAXNTHREADS); Sem_init(&shared.mutex, 0, 1); Sem_init(&shared.nempty, 0, NBUFF); Sem_init(&shared.nstored, 0, 0); Pthread_setconcurrency(nproducers + nconsumers); for (i = 0; i < nproducers; i++) { prodcount[i] = 0; Pthread_create(&tid_produce[i], NULL, produce, &prodcount[i]); } for (i = 0; i < nconsumers; i++) { conscount[i] = 0; Pthread_create(&tid_consume[i], NULL, consume, &conscount[i]); } for (i = 0; i < nproducers; i++) { Pthread_join(tid_produce[i], NULL); printf("producer count[%d] = %d ", i, prodcount[i]); } for (i = 0; i < nconsumers; i++) { Pthread_join(tid_consume[i], NULL); printf("consumer count[%d] = %d ", i, conscount[i]); } Sem_destroy(&shared.mutex); Sem_destroy(&shared.nempty); Sem_destroy(&shared.nstored); exit(0); } void* produce(void *arg) { int i; for ( ; ; ) { Sem_wait(&shared.nempty); //A Sem_wait(&shared.mutex); if (shared.nput >= nitems) { Sem_post(&shared.nstored); //重要! Sem_post(&shared.nempty); //A Sem_post(&shared.mutex); return NULL; } shared.buff[shared.nput % NBUFF] = shared.nputval; shared.nput++; shared.nputval++; Sem_post(&shared.mutex); Sem_post(&shared.nstored); //B *((int *)arg) += 1; } } void* consume(void *arg) { int i; for ( ; ; ) { Sem_wait(&shared.nstored); //B Sem_wait(&shared.mutex); if (shared.nget >= nitems) { Sem_post(&shared.nstored); //B Sem_post(&shared.mutex); return NULL; } i = shared.nget % NBUFF; if (shared.buff[i] != shared.ngetval) printf("error: buff[%d] = %d ", i, shared.buff[i]); shared.nget++; shared.ngetval++; Sem_post(&shared.mutex); Sem_post(&shared.nempty); //A *((int *)arg) += 1; } }
信号量的限制
- 在<unistd,h>中定义,也可运行时通过sysconf获取
- SEM_NSEMS_MAX:一个进程可以最大打开的信号量数(posix要求至少为256)
- SEM_VALUE_MAX:一个信号量的最大值(posix至少要求为32767)
可以用FIFO实现信号量也可以用内存映射I/O实现信号量。