和线性常微分方程组参数拟合类似,我们要用差分代替微分,然后进行插值处理,然后构造最小化函数。
最后用最优化方法处理该函数即可。
这里举个例子,先随便设一个非线性微分方程组,并给定初值:
然后定义最小化函数:

最后用之前介绍的非线性最优化方法解决。
matlab代码如下:
clear all;close all;clc; bsrc = rand(4,1); [t,h] = ode45(@(t,x)test1(t,x,bsrc),[0 100],[1 1]); plot(t,h(:,1),'r'); hold on; plot(t,h(:,2),'r'); hold on; t = t(1:3:2*end/3); x1 = h(1:3:2*end/3,1); x2 = h(1:3:2*end/3,2); plot(t,x1,'ro'); plot(t,x2,'ro'); T=min(t):0.1:max(t); %插值处理,如果数据多,也可以不插值 X1=spline(t,x1,T)'; X2=spline(t,x2,T)'; plot(T,X1,'b.'); plot(T,X2,'b.'); dX1 = diff(X1)*10; dX1=[dX1;dX1(end)]; dX2 = diff(X2)*10; dX2=[dX2;dX2(end)]; %BFGS求解 syms k1 k2 k3 k4; ff = sum((dX1 - (k1*exp(1./X1)+k4*sin(X2))).^2+(dX2-(cos(X1)*k2+k3*(1./X2))).^2); dff1 = diff(ff,k1);dff2 = diff(ff,k2); dff3 = diff(ff,k3);dff4 = diff(ff,k4); f = inline(char(ff),'k1','k2','k3','k4'); g1 = inline(char(dff1),'k1','k2','k3','k4'); g2 = inline(char(dff2),'k1','k2','k3','k4'); g3 = inline(char(dff3),'k1','k2','k3','k4'); g4 = inline(char(dff4),'k1','k2','k3','k4'); b = rand(4,1); rho=0.2;sigma=0.2; H=eye(4); re=[]; for i=1:1000 g=[g1(b(1),b(2),b(3),b(4)); g2(b(1),b(2),b(3),b(4)); g3(b(1),b(2),b(3),b(4)); g4(b(1),b(2),b(3),b(4));]; dk=-inv(H)*g; mk=1; for j=1:50 new=f(b(1)+rho^j*dk(1),... b(2)+rho^j*dk(2),... b(3)+rho^j*dk(3),... b(4)+rho^j*dk(4)); old=f(b(1),b(2),b(3),b(4)); if new < old +sigma*rho^j*g'*dk mk=j; break; end end norm(g) if norm(g)<1e-30 || isnan(new) break; end b = b + rho^mk*dk; gg=[g1(b(1),b(2),b(3),b(4)); g2(b(1),b(2),b(3),b(4)); g3(b(1),b(2),b(3),b(4)); g4(b(1),b(2),b(3),b(4));]; q = gg - g; %q = g(k+1)-g(k) p = rho^mk*dk; %p = x(k+1)-x(k) H = H - (H*p*p'*H)/(p'*H*p) + (q*q')/(q'*p); %矩阵更新 end bsrc b [t,h] = ode45(@(t,x)test1(t,x,b),[0 100],[1 1]); plot(t,h(:,1),'g'); hold on; plot(t,h(:,2),'g');
test1.m:
function dy=test1(t,x,A) a = A(1); b = A(2); c = A(3); d = A(4); dy=[a*exp(1/x(1))+d*sin(x(2)); cos(x(1))*b+c/x(2)];
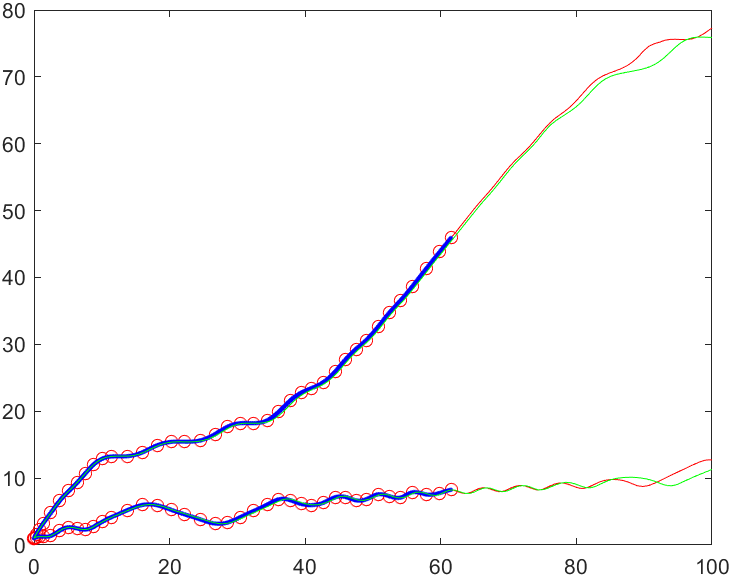
结果如下:

上面这个结果还算可以。
不过由于是非线性微分方程组,参数差一点就可能导致系统后续差别越来越大,所谓混沌与蝴蝶效应。
所以大多数拟合的结果类似下面或更糟:
注:
后来我又看了一下,其实这里还是属于线性系数的,因为a,b,c,d四个系数并没在非线性函数中。
非线性系数我做了几次试验,效果不甚理想,后面有时间再写一篇。