一.原理
平滑也称为模糊,平滑处理时需要用到一个滤波器,最常用的滤波器是线性滤波器,线性滤波器处理的输出像素值 (i.e.  ) 是输入像素值 (i.e.
) 是输入像素值 (i.e.  )的加权和 ;
)的加权和 ;

h(k,l)称为核,仅仅是一个加权系数,滤波器可以简单的理解为一个包含加权系数的窗口,当使用这个滤波器平滑处理图像时,将让这个窗口滑过图像。
我主要介绍几种常见的滤波器。
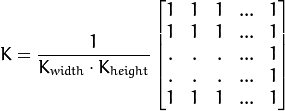
1.归一化滤波器
最简单的滤波器,输出像素值是窗口内像素值的均值(所有像素加权数相等)
2.高斯滤波器
最有用的滤波器(不是最快的),高斯滤波器是将输入数组的每一个像素点与高斯内核卷积,将卷积和作为输出像素值。
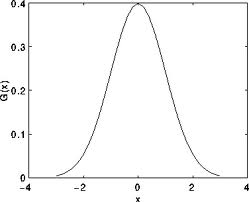
2维高斯函数可以表达为 :

其中  为均值 (峰值对应位置),
为均值 (峰值对应位置),  代表标准差 (变量
代表标准差 (变量  和 变量
和 变量  各有一个均值,也各有一个标准差)
各有一个均值,也各有一个标准差)
3.中值滤波器
中值滤波器将图像的每一个像素用领域(以当前像素为中心的正方形区域)像素的中值代替
4.双边滤波器
目前我们了解的滤波器都是为了 平滑 图像, 问题是有些时候这些滤波器不仅仅削弱了噪声, 连带着把边缘也给磨掉了。 为避免这样的情形 (至少在一定程度上 ), 我们可以使用双边滤波。
类似于高斯滤波器,双边滤波器也给每一个邻域像素分配一个加权系数。 这些加权系数包含两个部分, 第一部分加权方式与高斯滤波一样,第二部分的权重则取决于该邻域像素与当前像素的灰度差值。