2019年2月22日13:52:37
https://zhuanlan.zhihu.com/p/29968267
这里有个tensorlfow代码的阅读博客:
https://zhuanlan.zhihu.com/p/29664269
跑的是这个版本: https://github.com/ClubAI/MonoDepth-PyTorch
对比了下 tf 和 pt 版本的代码,比较简单,就不分析了。
输入的图片先resize到 256x512 大小
model部分生成了4个不同尺度的视差图:
print("self disp1 size:", self.disp1.size() ) # torch.Size([1, 2, 256, 512]) print("self disp2 size:", self.disp2.size() ) # torch.Size([1, 2, 128, 256]) print("self disp3 size:", self.disp3.size() ) # torch.Size([1, 2, 64, 128]) print("self disp4 size:", self.disp4.size() ) # torch.Size([1, 2, 32, 64]) return self.disp1, self.disp2, self.disp3, self.disp4 # 输出各个尺度的左右视差图
然后 loss 部分 loss = loss_function(disps, [left, right])
因为双目相机视差公式 x_left = x_right + disparity 是假设两个相机的光轴平行,
然后代码中真的就是直接加。
所以输入到网络中的 左-右图像对都要先做 立体校正 !
参考 cv2.stereoRectify 的相关知识。
https://www.cnblogs.com/zyly/p/9373991.html


1 # -*- coding: utf-8 -*- 2 """ 3 Created on Wed Feb 27 13:43:29 2019 4 5 @author: x 6 7 这个用opencv的函数完成了深度估计 8 9 https://github.com/aaliomer/Home-Drone/blob/ 10 a22f9d78644996d7876716ee961e29a9f4e8a705/python/depth%20map/calibrationExample.py 11 12 13 https://blog.csdn.net/xiao__run/article/details/78887362 14 15 """ 16 17 import numpy as np 18 import cv2 19 20 numBoards = 30 #how many boards would you like to find 21 22 criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001) 23 24 w = 9 25 h = 6 26 27 # Arrays to store object points and image points from all the images. 28 object_points = [] # 3d point in real world space 29 imagePoints1 = [] # 2d points in image plane. 30 imagePoints2 = [] # 2d points in image plane. 31 32 corners1 = [] 33 corners2 = [] 34 35 obj = np.zeros((9*6, 3), np.float32) 36 obj[:,:2] = np.mgrid[0:9, 0:6].T.reshape(-1,2) 37 obj = obj*25 # 25 mm 18.1 38 39 40 cap = cv2.VideoCapture("./calibration.avi") 41 42 success = 0 43 k = 0 44 found1 = False 45 found2 = False 46 47 48 49 i = 0 50 while True: 51 i += 1 52 ret, frame = cap.read() 53 if ret is False: 54 break 55 56 img1 = frame[:, 640:] # left 57 img2 = frame[:, 0:640] # right 58 59 # retL, img1 = vidStreamL.read() 60 # retR, img2 = vidStreamR.read() 61 62 # height, width, depth = img1.shape 63 64 gray1 = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY) 65 gray2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY) 66 67 found1, corners1 = cv2.findChessboardCorners(img1, (w,h), None) 68 found2, corners2 = cv2.findChessboardCorners(img2, (w,h), None) 69 70 if (found1): 71 cv2.cornerSubPix(gray1, corners1, (11, 11), (-1, -1),criteria) 72 cv2.drawChessboardCorners(gray1, (w,h), corners1, found1) 73 74 if (found2): 75 cv2.cornerSubPix(gray2, corners2, (11, 11), (-1, -1), criteria) 76 cv2.drawChessboardCorners(gray2, (w,h), corners2, found2) 77 78 cv2.imshow('image1 left', gray1) 79 cv2.imshow('image2 right', gray2) 80 81 k = cv2.waitKey(1) 82 83 84 if (found1 != 0 and found2 != 0): 85 86 if i%20 == 0: 87 imagePoints1.append(corners1); 88 imagePoints2.append(corners2); 89 object_points.append(obj); 90 91 print("Corners stored ") 92 93 success+=1 94 95 if (success >= numBoards): 96 break 97 98 99 cap.release() 100 cv2.destroyAllWindows() 101 #%% 102 # 下面是matlab标定的结果,应该比opencv的更准一点 103 mtx_left = np.array([ 104 [767.49, 1.927, 314.49], 105 [ 0. ,766.64, 237.19], 106 [ 0. ,0. ,1.], 107 ]) 108 109 dist_left = np.array([0.0047, 0.0793, 1.39e-04, 0.0030, -0.6080]) 110 111 112 mtx_right = np.array([ 113 [767.72, 1.3963, 330.26], 114 [ 0. ,765.37, 160.09], 115 [ 0. ,0. ,1. ], 116 ]) 117 118 dist_right = np.array([ 0.0411,-0.3073,-3.037e-04,0.0041,0.9156]) 119 #%% 120 print("Starting Calibration ") 121 122 width = 640 123 height = 480 124 125 retval, cameraMatrix1, distCoeffs1, cameraMatrix2, distCoeffs2, R, T, E, F 126 = cv2.stereoCalibrate(object_points, imagePoints1, imagePoints2, 127 mtx_left, dist_left, mtx_right, dist_right, 128 (width, height) ) 129 130 print("Done Calibration ") 131 #%% 132 size = (640, 480) # 图像尺寸 133 134 # 进行立体更正 135 R1, R2, P1, P2, Q, validPixROI1, validPixROI2 = 136 cv2.stereoRectify(mtx_left, dist_left, 137 mtx_right, dist_right, size, R, T) 138 139 # 计算更正map 140 left_map1, left_map2 = 141 cv2.initUndistortRectifyMap(mtx_left, dist_left, R1, P1, size, cv2.CV_16SC2) 142 143 right_map1, right_map2 = 144 cv2.initUndistortRectifyMap(mtx_right, dist_right, R2, P2, size, cv2.CV_16SC2) 145 #%% 146 #cv2.namedWindow("left") 147 #cv2.namedWindow("right") 148 cv2.namedWindow("depth") 149 150 #cv2.moveWindow("left", 0, 0) 151 #cv2.moveWindow("right", 600, 0) 152 153 cv2.createTrackbar("num", "depth", 0, 10, lambda x: None) 154 cv2.createTrackbar("blockSize", "depth", 5, 255, lambda x: None) 155 156 157 # 添加点击事件,打印当前点的距离 158 def callbackFunc(e, x, y, f, p): 159 if e == cv2.EVENT_LBUTTONDOWN: 160 print(threeD[y][x]) 161 162 cv2.setMouseCallback("depth", callbackFunc, None) 163 164 cap = cv2.VideoCapture("./outdoor_cam_1547865993.avi") 165 #cap = cv2.VideoCapture("./calibration.avi") 166 167 while True: 168 ret, frame = cap.read() 169 if ret is False: 170 break 171 172 frame1 = frame[:, 640:] # left 173 frame2 = frame[:, 0:640] # right 174 175 if ret is False: 176 break 177 178 # 根据更正map对图片进行重构 179 img1_rectified = cv2.remap(frame1, left_map1, left_map2, cv2.INTER_LINEAR) 180 img2_rectified = cv2.remap(frame2, right_map1, right_map2, cv2.INTER_LINEAR) 181 182 # 将图片置为灰度图,为StereoBM作准备 183 imgL = cv2.cvtColor(img1_rectified, cv2.COLOR_BGR2GRAY) 184 imgR = cv2.cvtColor(img2_rectified, cv2.COLOR_BGR2GRAY) 185 186 # 两个trackbar用来调节不同的参数查看效果 187 num = cv2.getTrackbarPos("num", "depth") 188 blockSize = cv2.getTrackbarPos("blockSize", "depth") 189 if blockSize % 2 == 0: 190 blockSize += 1 191 if blockSize < 5: 192 blockSize = 5 193 194 # 根据Block Maching方法生成差异图(opencv里也提供了 195 # SGBM/Semi-Global Block Matching算法,有兴趣可以试试) 196 stereo = cv2.StereoBM_create(numDisparities=16*num, blockSize=blockSize) 197 disparity = stereo.compute(imgL, imgR) 198 199 disp = cv2.normalize(disparity, disparity, alpha=0, beta=255, 200 norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_8U) 201 202 disp = cv2.applyColorMap(disp, cv2.COLORMAP_HOT) 203 204 # 将图片扩展至3d空间中,其z方向的值则为当前的距离 205 threeD = cv2.reprojectImageTo3D(disparity.astype(np.float32)/16., Q) 206 207 208 # cv2.imshow("left", img1_rectified) 209 # cv2.imshow("right", img2_rectified) 210 211 lr = np.hstack((img1_rectified, img2_rectified)) 212 213 cv2.imshow("left_right", lr) 214 215 cv2.imshow("depth", disp) 216 217 key = cv2.waitKey(1) 218 if key == ord("q"): 219 break 220 221 # elif key == ord("s"): 222 # cv2.imwrite("./snapshot/BM_left.jpg", imgL) 223 # cv2.imwrite("./snapshot/BM_right.jpg", imgR) 224 # cv2.imwrite("./snapshot/BM_depth.jpg", disp) 225 226 cap.release() 227 cv2.destroyAllWindows()
另外,kitti的左右图像重叠率在90%以上,如果自己用双目相机拍视频,
想要尽量复现出一个较好的结果的话,应该尽量贴近kitti数据集的状态。
等玩熟了再尝试做点改变。
训练过程 不需要 具体的参数 焦距 f 和 基线长b,这就说明了最后训练出来的网络权重只
对这个相机有效,只对这个相机拍出来的图片能做深度估计。
换个相机拍的图片,深度预测效果可能就没那么好了。
2019年3月8日14:15:57
用vscode的对比功能,可以轻松的比较 tf 和 pt 版本的代码的异同
后续可以把其他较新的tensorflow的库改写成pytorch版了。

2019年3月14日16:54:45
在 pytorch 下写了一个 saver,保存了 模型权重 以及 optimizer 状态。
emmm,以后可以把耗时的训练分成好几个晚上来做了。。。都是被渣1050逼的。。。
其实最好做一个 非常小的数据集 以方便调试,做一个 train、valid 之外的很小的数据集。
2019年3月15日08:59:57
用于train的图片3225张,用于valid的图片645张,
跑了81个epoch,平均每个epoch大概 630 s,到第60个epoch的时候valid loss就不怎么往下走了,
在valid数据集上,部分图片的测试结果已经可以看了。后续还要再调整下 lr 继续训练。
公司的双目相机很劣质,数据集也很小,拍摄的场景也不理想,训练的epoch也不多,
这个结果已经可以接受了。
2019年3月16日09:27:36
又继续训练了一个晚上,epoch跑到了差不多160,train_loss从0.66掉到0.61,valid_loss
还是大概0.68左右,没怎么往下降。但是看valid_dataset的效果,比昨天略好。
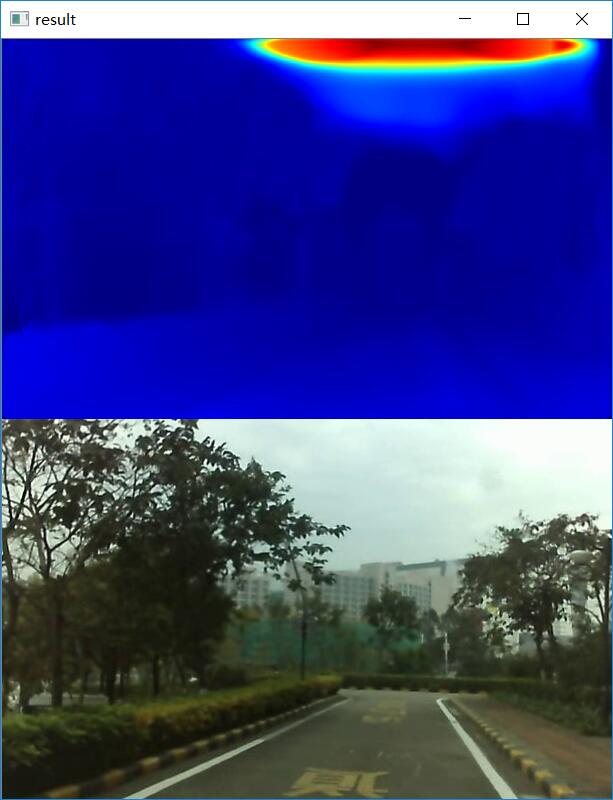
对于玻璃、镜面的效果比昨天的预测结果略好,下面的结果是disparities_pp
1

2
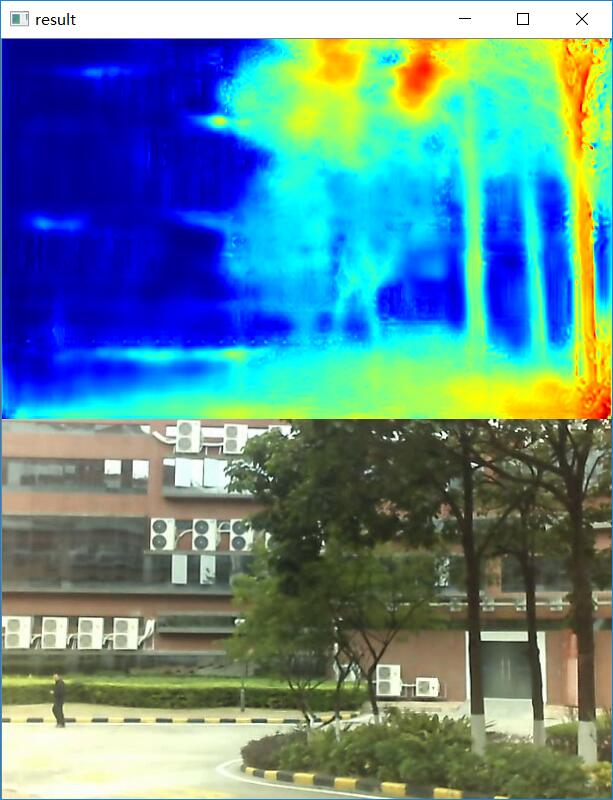
对于大片的天空还是预测错误。
2019年4月22日10:27:31
前两天发现opencv对于我手边这个非常渣的双目相机的标定结果并不是非常精确。。。
校正完了,再拿校正完的棋盘图片算内参,结果两个相机的内参差距有减少,但并
不是一模一样的。。。准备再拿matlab校正一次做对比。
monodepth效果不太好可能是opencv和相机校正的锅。。。