一、前言
1.简介:
本文是基于STM32F1,将数据发送至NRF模块的寄存器,并将数据重新读取,通过串口发送出来的简单SPI单通信。
2.SPI简介:
调过STM8的都已经对SPI有所了解,调法都一致,这里就不做详细的讲解。
3.准备工作:
软件层:
Keil5 链接: 点击下载 提取码:wrt9
STMCubeMX5.1.0版本 链接: 点击下载 提取码:20xs
硬件层:
1. STM32F1ZE开发板 (什么型号的都可以,只要能在CUbe配置好型号就行)
2.NRF24L01模块

二、SPI详解
SPI是串行外设接口(Serial Peripheral Interface)的缩写。是 Motorola 公司推出的一 种同步串行接口技术,是一种高速的,全双工,同步的通信总线。因为其没有指定的流控制,没有应答机制确认是否接收到数据,所以跟IIC总线协议比较在数据可靠性上有一定的缺陷。
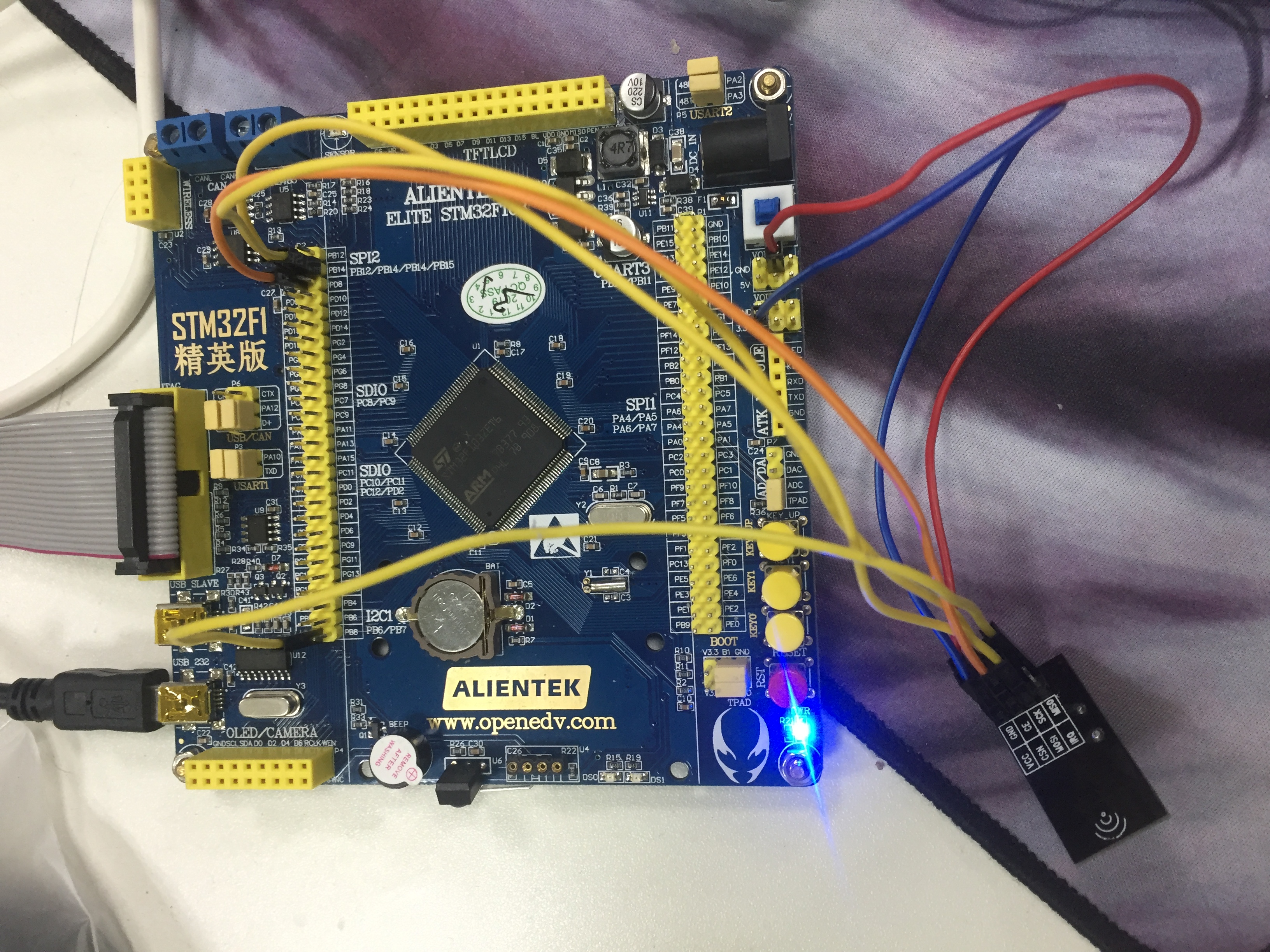
1.硬件接线:
VCC、GND不用讲。下面的四条线是完成通信的最基本线,作用已简略给出,需要进一步了解的可以详看数据手册。大家可以按照相应线用示波器观察对应波形,看时序是否正确。
CSN:从设备使能信号,由主设备控制。
SCK:时钟信号,由主设备产生。
MISO:主设备数据输入,从设备数据输出。(主要用于读取数据)
MOSI:主设备数据输出,从设备数据输入。(主要用于写入数据)
(在这里提示用示波器看的同学,记得看读取到数据的波形时,切换到MISO线,在MOSI线上是观测不到读取回来的数据 的)

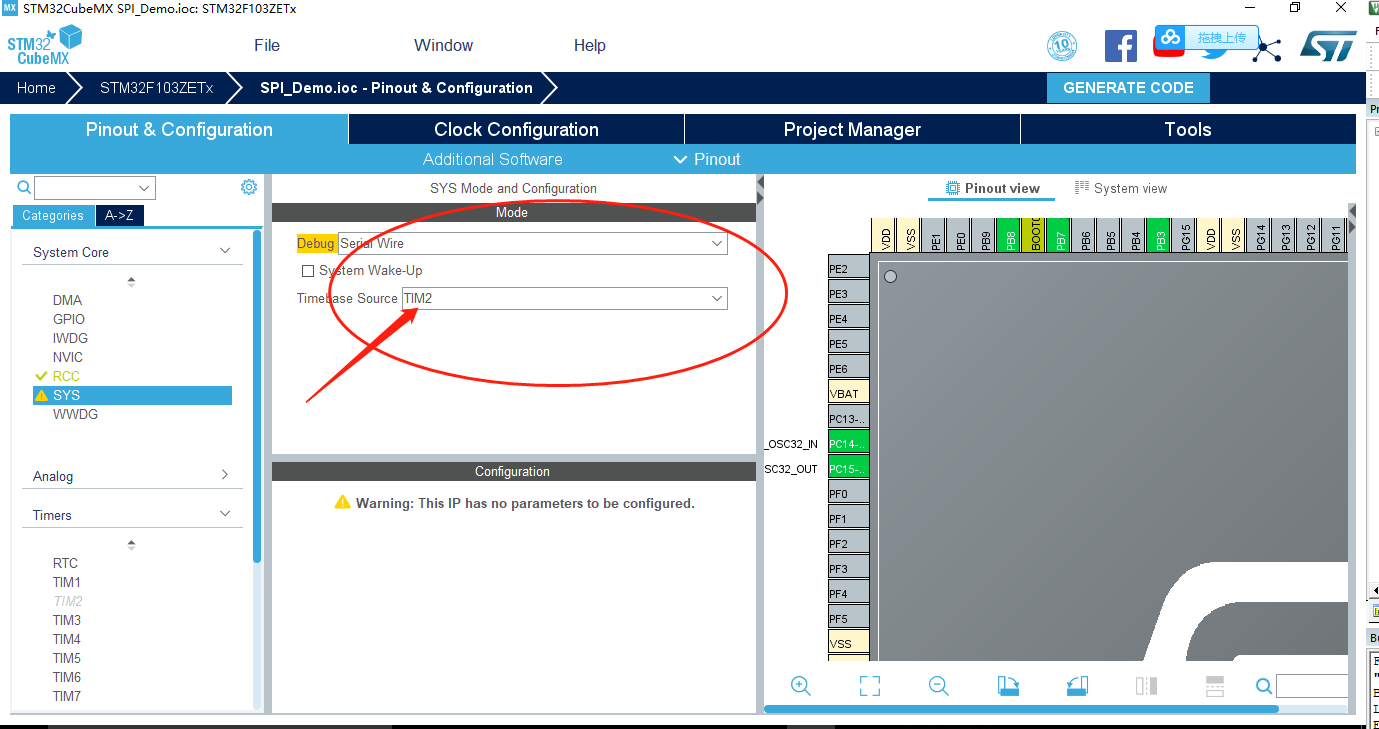
2.Cube配置问题:
一开始调试时用的TIM7来配置Cube,但是一直无法正确读到波形,通过看数据手册和部分历程,我将时钟配置成TIM2,就能正常收发了。其他配置跟平常串口配置一样就行了,没有特别需要注意的。
3.寄存器地址和驱动读写问题:
不同于IIC读取时钟模块,这里只需要寄存器的地址,同时要查询到读指令和写指令来驱动设备读与写的功能。
#define CONFIG 0x00 //配置寄存器地址; //寄存器读写驱动命令: #define READ_REG_NRF 0x00 //读配置寄存器,低5位为寄存器地址 #define WRITE_REG_NRF 0x20 //写配置寄存器,低5位为寄存器地址
4.本文部分代码:
最后贴出一些主要的代码,这些都是最基础的代码,看着数据手册写就行了。但是这里我在读取与写入寄存器函数中并没有使用延时,但是也能成功输出。
SPI_test.c
void delay2ms() //开机延时2MS,实测 { unsigned char a,b,c; for(c=5;c>0;c--) for(b=68;b>0;b--) for(a=31;a>0;a--); } //这个函数是将读取/写入一个字节合二为一的基础函数代码。 uint32_t uSPI_RW_Byte(uint32_t uByte) { uint32_t uBits; for(uBits=0; uBits<8; uBits++) //8次循环 { if(uByte & 0x80) PIN_MOSI_H; //该位为1则置1 else PIN_MOSI_L; //该位为0则置0 uByte <<= 1; //左移一位,可读取1位,并输出下一位 PIN_SCK_H; //拉高时序线,开始发送数据 if(MISO) //判断MISO电平 uByte|=0x01; //若为1则赋值到相应的位上 PIN_SCK_L; //结束该Byte数据的发送 } return uByte; }
如果看不懂这个函数,想分开的函数,可以用下面这两个 /* ** 函数名 : SPI_Read_OneByte ** 返回值 : temp--SPI读取的一字节数据 ** 参 数 : None ** 描 述 : 下降沿读数据,每次读取 1 bit */ uint32_t SPI_Read_OneByte(void) { uint32_t i; uint32_t temp = 0; for(i=0;i<8;i++) { temp <<= 1; //读取MISO 8次输入的值,存入temp。 //读取最后1byte的最后一位(即LSB)之后,不能再左移了 PIN_SCK_H; if(MISO) //读取最高位,保存至最末尾,通过左移位完成读整个字节 temp |= 0x01; else temp &= ~0x01; PIN_SCK_L; //下降沿来了(SCK从1-->0),MISO上的数据将发生改变,稳定后读取存入temp } return temp; } /* ** 函数名 : SPI_Write_OneByte ** 返回值 : None ** 参 数 : u8_writedata--SPI写入的一字节数据 ** 描 述 : 上升沿写数据,每次写入 1 bit */ void SPI_Write_OneByte(uint32_t u8_writedata) { uint32_t i; for(i=0;i<8;i++) { if(u8_writedata & 0x80) //判断最高位,总是发送最高位 PIN_MOSI_H; //MOSI输出1,数据总线准备数据1 else PIN_MOSI_L; //MOSI输出0,数据总线准备数据0 PIN_SCK_H; //上升沿来了(SCK从0-->1),数据总线上的数据写入到器件 u8_writedata <<= 1; //左移抛弃已经输出的最高位 PIN_SCK_L; //拉低SCK信号,初始化为0 } } /* ** 函数名: nRF24L01_WriteReg ** 返回值: None ** 参 数 : (1)uint8 addr--寄存器地址 ** (2)uint8 value--写入值 ** 说 明 : nRF24L01寄存器写函数 */ void nRF24L01_WriteReg(uint32_t addr, uint32_t value) { PIN_CSN_L; //CS片选拉低 uSPI_RW_Byte(WRITE_REG_NRF+addr); uSPI_RW_Byte(value); PIN_CSN_H; //CS片选拉高 } /* ** 函数名: nRF24L01_ReadReg ** 返回值: value--读取寄存器值 ** 参 数 : addr--寄存器地址 ** 说 明 : nRF24L01寄存器读函数 */ uint32_t nRF24L01_ReadReg(uint8_t addr) { uint8_t value; PIN_CSN_L; //CS片选拉低 uSPI_RW_Byte(READ_REG_NRF+addr); //SPI读数据 value=uSPI_RW_Byte(0); PIN_CSN_H; //CS片选拉高 return value; }
以下贴出的是SPI_test.h的部分代码:是对上面的一些定义函数的补充
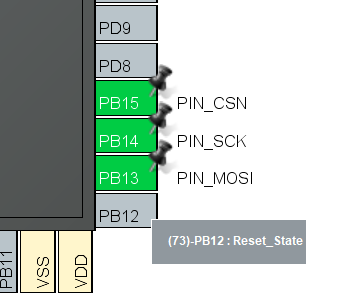
SPI_test.h #define PIN_CSN_H HAL_GPIO_WritePin(GPIOB, GPIO_PIN_15, GPIO_PIN_SET) #define PIN_CSN_L HAL_GPIO_WritePin(GPIOB, GPIO_PIN_15, GPIO_PIN_RESET) #define PIN_MISO_H HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_SET) #define PIN_MISO_L HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_RESET) #define PIN_SCK_H HAL_GPIO_WritePin(GPIOB, GPIO_PIN_14, GPIO_PIN_SET) #define PIN_SCK_L HAL_GPIO_WritePin(GPIOB, GPIO_PIN_14, GPIO_PIN_RESET) #define PIN_MOSI_H HAL_GPIO_WritePin(GPIOB, GPIO_PIN_13, GPIO_PIN_SET) #define PIN_MOSI_L HAL_GPIO_WritePin(GPIOB, GPIO_PIN_13, GPIO_PIN_RESET) #define MISO HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) //判断0或1
最后贴出主函数的调用函数,这里是用调用HAL库函数的串口直接发送的方法:如图

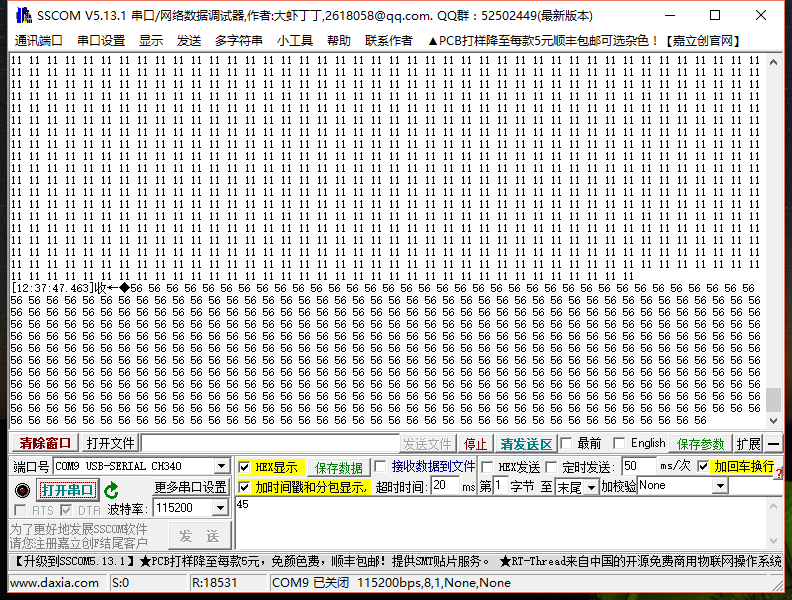
5.输出结果验证:
验证是否读取到数值,可以直接在示波器看波形,也可以采用直接在串口调试器看。但是个人建议先观察示波器波形,比较容易找到问题所在。
三、总结:
相对于STM8,在STM32上来调试时,最主要是要注意时钟配置问题,其他都比较方便,也没有特别需要注意的问题。有不对的地方可以留言指出或提问。