在现代操作系统里,同一时间可能有多个内核执行流在执行,因此内核其实象多进程多线程编程一样也需要一些同步机制来同步各执行单元对共享数据的访问。尤其是在多处理器系统上,更需要一些同步机制来同步不同处理器上的执行单元对共享的数据的访问
1、原子操作
所谓原子操作,就是该操作绝不会在执行完毕前被任何其他任务或事件打断,也就说,它的最小的执行单位,不可能有比它更小的执行单位,因此这里的原子实际是使用了物理学里的物质微粒的概念。原子操作需要硬件的支持,因此是架构相关的,其API和原子类型的定义都定义在内核源码树的include/asm/atomic.h文件中,它们都使用汇编语言实现,因为C语言并不能实现这样的操作。
原子操作主要用于实现资源计数,很多引用计数(refcnt)就是通过原子操作实现的。原子类型定义如下:
typedef struct
{
volatile int counter;
}
atomic_t;
volatile修饰字段告诉gcc不要对该类型的数据做优化处理,对它的访问都是对内存的访问,而不是对寄存器的访问。
原子操作通常用于实现资源的引用计数,在TCP/IP协议栈的IP碎片处理中,就使用了引用计数,碎片队列结构struct ipq描述了一个IP碎片,字段refcnt就是引用计数器,它的类型为atomic_t,当创建IP碎片时(在函数ip_frag_create中),使用atomic_set函数把它设置为1,当引用该IP碎片时,就使用函数atomic_inc把引用计数加1。
当不需要引用该IP碎片时,就使用函数ipq_put来释放该IP碎片,ipq_put使用函数atomic_dec_and_test把引用计数减1并判断引用计数是否为0,如果是就释放IP碎片。函数ipq_kill把IP碎片从ipq队列中删除,并把该删除的IP碎片的引用计数减1(通过使用函数atomic_dec实现)。
2、信号量
Linux内核的信号量在概念和原理上与用户态的System V的IPC机制信号量是一样的,但是它绝不可能在内核之外使用,因此它与System V的IPC机制信号量毫不相干
信号量在创建时需要设置一个初始值,表示同时可以有几个任务可以访问该信号量保护的共享资源,初始值为1就变成互斥锁(Mutex),即同时只能有一个任务可以访问信号量保护的共享资源。
一个任务要想访问共享资源,首先必须得到信号量,获取信号量的操作将把信号量的值减1,若当前信号量的值为负数,表明无法获得信号量,该任务必须挂起在该信号量的等待队列等待该信号量可用;若当前信号量的值为非负数,表示可以获得信号量,因而可以立刻访问被该信号量保护的共享资源。
当任务访问完被信号量保护的共享资源后,必须释放信号量,释放信号量通过把信号量的值加1实现,如果信号量的值为非正数,表明有任务等待当前信号量,因此它也唤醒所有等待该信号量的任务。
3、自旋锁
自旋锁与互斥锁有点类似,只是自旋锁不会引起调用者睡眠,如果自旋锁已经被别的执行单元保持,调用者就一直循环在那里看是否该自旋锁的保持者已经释放了锁,"自旋"一词就是因此而得名。
由于自旋锁使用者一般保持锁时间非常短,因此选择自旋而不是睡眠是非常必要的,自旋锁的效率远高于互锁。
1.使用gdb在sys_time处设置断点并list找到的代码

2.用s(step)跟踪断点
3.当进入system_call的时候gdb无法继续跟踪,实验结束,找到源代码进行分析
system_call对应的汇编代码的工作过程
主要是通过一个宏SAVE ALL实现的.在中断发生前夕,要把所有相关寄存器的内容都保存在堆栈中,这是通过SAVE_ALL宏完成的
ENTRY(system_call)
RING0_INT_FRAME
SAVE_ALL # 保存现场
GET_THREAD_INFO(%ebp) #将当前信息保存在ebp
testl $_TIF_WORK_SYSCALL_ENTRY,TI_flags(%ebp) #判断是否 trace调用
jnz syscall_trace_entry
cmpl $(NR_syscalls), %eax #判断系统调用号是否超出最大值
jae syscall_badsys
syscall_call:
call *sys_call_table(,%eax,4) # 这里将真正调用对应的系统调用,调用号的意义在这里也表现出来了sys_call_table + 4 * %eax即为系统调用的地址
syscall_after_call:
movl %eax,PT_EAX(%esp) # 保存系统调用的返回值
syscall_exit:
LOCKDEP_SYS_EXIT
DISABLE_INTERRUPTS(CLBR_ANY) # 屏蔽其他系统调用
TRACE_IRQS_OFF
movl TI_flags(%ebp), %寄存器ecx是通用寄存器,在保护模式中,可以作为内存偏移指针(此时,DS作为 寄存器或段选择器),此时为返回到系统调用之前做准备
testl $_TIF_ALLWORK_MASK, %ecx # current->work #退出系统调用之前,检查是否需要处理信号
jne syscall_exit_work
restore_nocheck:
RESTORE_REGS 4 #x86架构恢复寄存器代码
irq_return:
INTERRUPT_RETURN
system_call执行原理补充
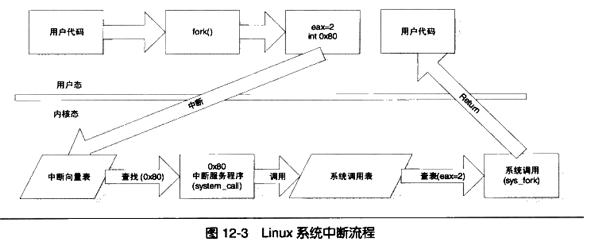
系统调用是通过软中断指令INT 0x80 实现的,而这条INT 0x80指令就被封装在C库的函数中。(软中断和我们常说的硬中断不同之处在于,软中断是由指令触发的,而不是由硬件外设引起的。)INT 0x80 这条指令的执行会让系统跳转到一个预设的内核空间地址,它指向系统调用处理程序,即system_call函数。
system_call函数是怎么找到具体的系统调用服务例程的呢?通过系统调用号查找系统调用表sys_call_table!软中断指令INT 0x80执行时,系统调用号会被放入 eax 寄存器中,system_call函数可以读取eax寄存器获取,然后将其乘以4,生成偏移地址,然后以sys_call_table为基址,基址加上偏移地址,就可以得到具体的系统调用服务例程的地址了!然后就到了系统调用服务例程了。需要说明的是,系统调用服务例程只会从堆栈里获取参数,所以在system_call执行前,会先将参数存放在寄存器中,system_call执行时会首先将这些寄存器压入堆栈。system_call退出后,用户可以从寄存器中获得(被修改过的)参数。
系统调用通过软中断INT 0x80陷入内核,跳转到系统调用处理程序system_call函数,然后执行相应的服务例程。但是由于是代表用户进程,所以这个执行过程并不属于中断上下文,而是进程上下文。因此,系统调用执行过程中,可以访问用户进程的许多信息,可以被其他进程抢占,可以休眠。当系统调用完成后,把控制权交回到发起调用的用户进程前,内核会有一次调度。如果发现有优先级更高的进程或当前进程的时间片用完,那么会选择优先级更高的进程或重新选择进程执行。
进程在创建时具有父子关系,通过调用fork()来创建一个新进程。创建的新进程是从return_from_fork开始执行的,复制内核堆栈只复制了一部分,int指令和save_all压到内核栈的内容。参数,系统调用号等都进行压栈。fork、vfork和clone三个系统调用都可以创建一个新进程,而且都是通过调用do_fork来实现进程的创建。进程创建过程相关知识,还要再通过MOOC视频勤加复习巩固。