RCNN:
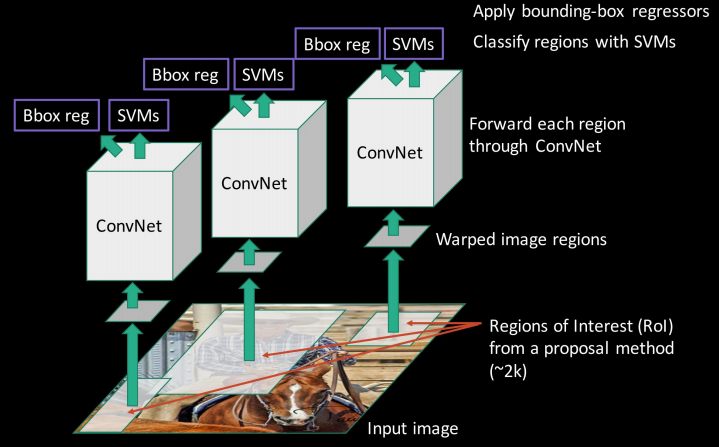
- 候选区生成(Selective Search)。
- 分割成2000左右的候选小区域
- 合并规则:颜色、纹理相近,尺度均匀,合并后形状规则
- 特征提取。
- 归一候选区尺寸为227×227,归一方法。
- 使用在imageNet上的分类网络作为预训练网络,预训练网络输出4096维特征
- 预训练网络加上全连接层在分类数据集上预训练
- 每一类使用SVM分类器
- 对预训练网络输出的4096维特征,使用多个SVM分类器进行判断
- 对于负样本过多的问题,使用hard negative mining,将重叠框小于阈值的作为负类。
- 位置回归
- 训练回归器输出x,y,d,h偏移量
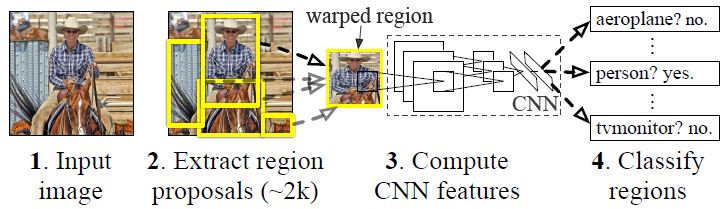
- 训练回归器输出x,y,d,h偏移量
fast RCNN
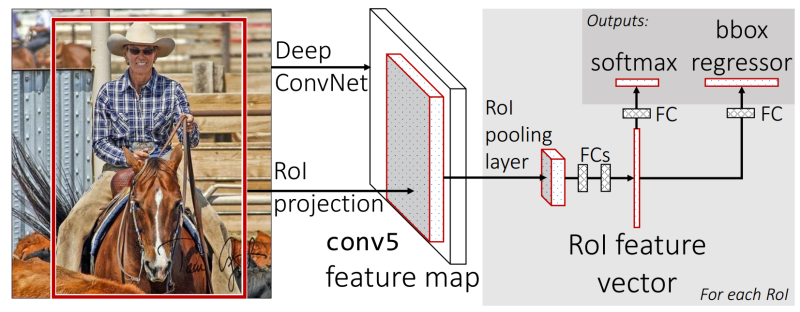
- 使用整张图片传入网络提取特征
- 使用Selective search等方法得到候选区域,复用前面阶段的网络特征
- 对候选区使用Roi Pooling层规定尺寸图像(全连接层需要相同大小的输入)

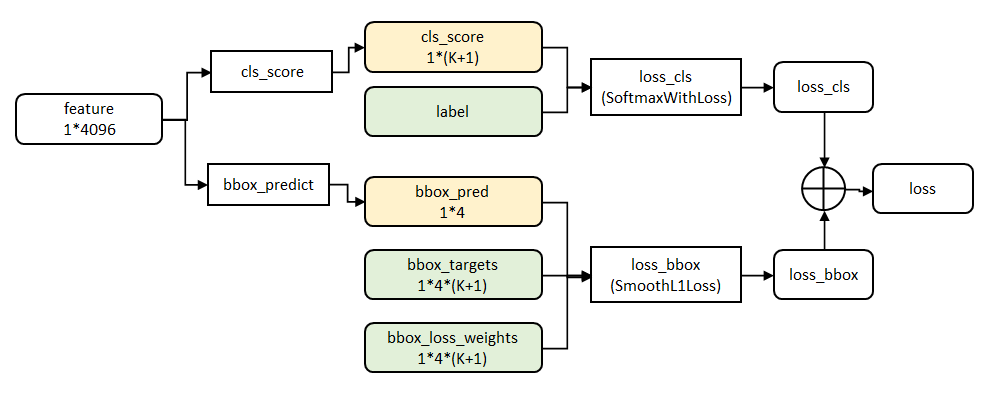
- 输入到两个并行的全连接层中,分别计算损失
例如:
对于输入图像:

候选区域:

最后一个卷积层:
放大
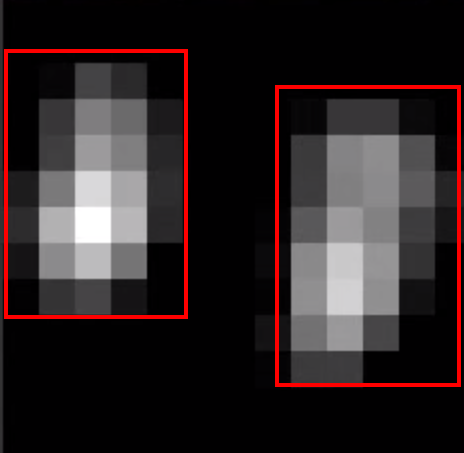
归一尺寸的候选区域的特征:

和

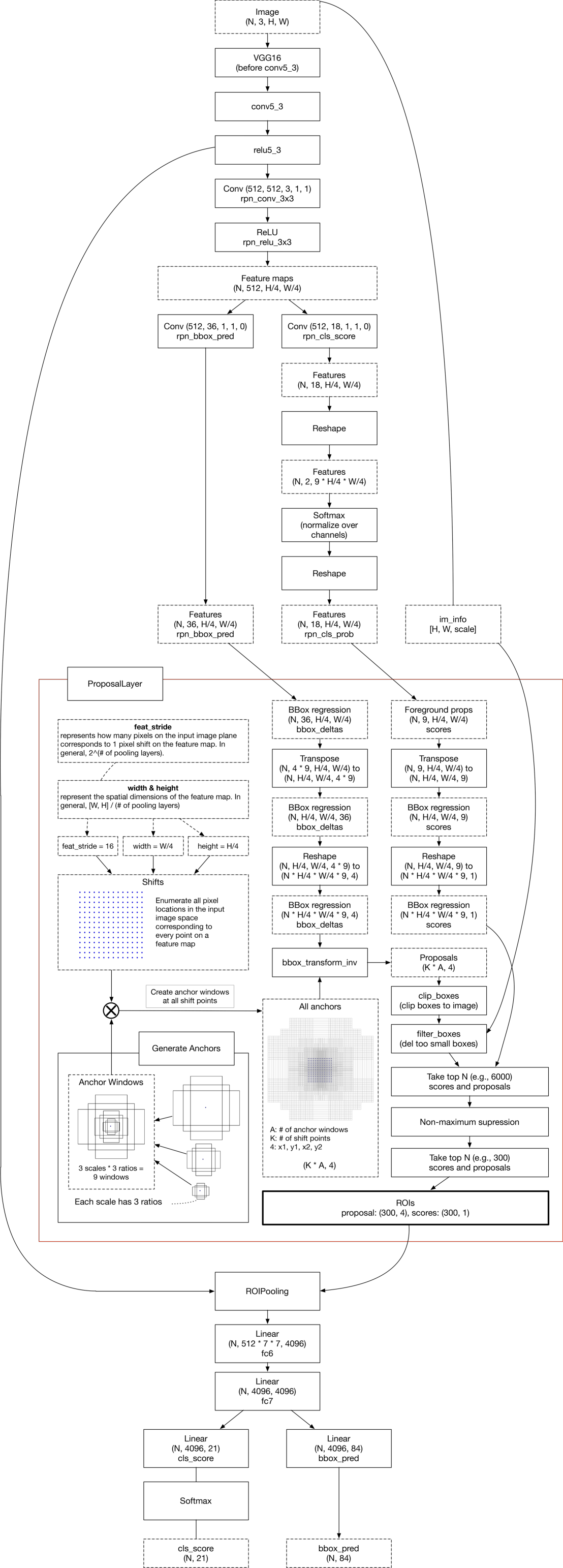
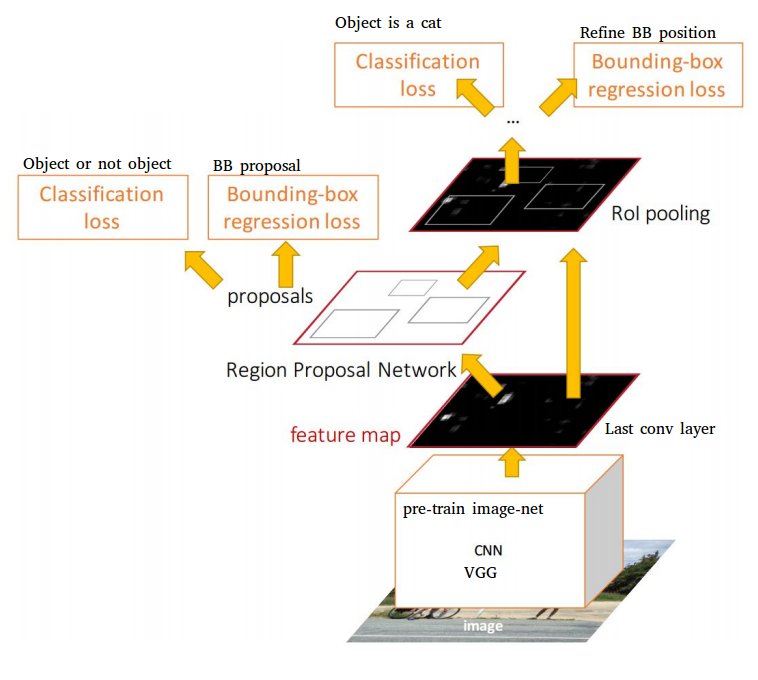
faster RCNN
主要思想是使用最后一个卷积层来得到候选区域,faster RCNN相当于:候选区域生成网络+fast RCNN。
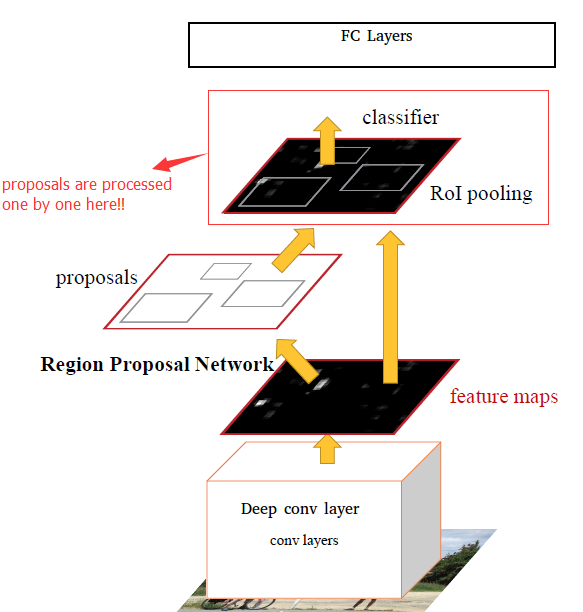
- 特征提取网络,VGG-16等。网络输出5139256维特征
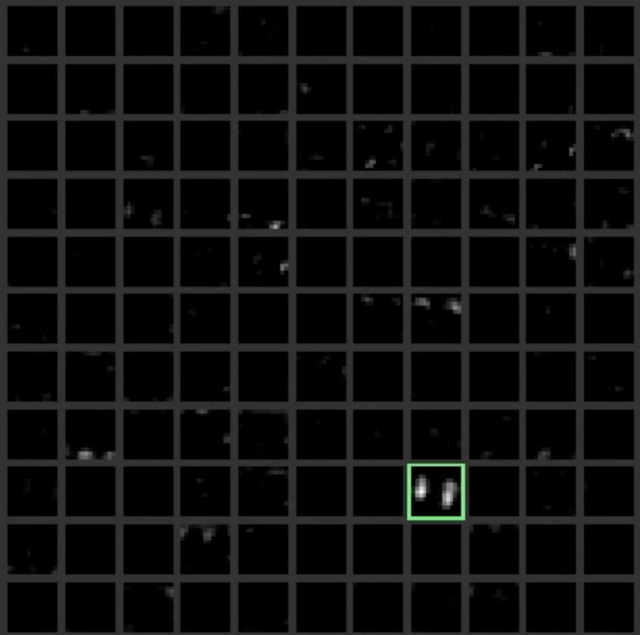
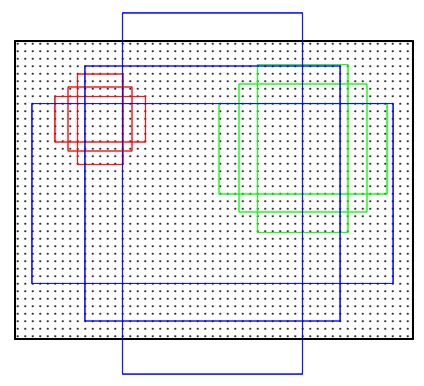
- 使用3种面积,3种长宽总共9种候选窗口,称为:anchor,如图:
- 训练过程中有四种损失:
- 区域生成网络的前后景分类损失(Object or not object)
- 区域生成网络的区域位置损失(Bounding box proposal)
- Fast RCNN物体分类损失(Normal object classification)
- Fast RCNN区域位置损失(Improve previous Bounding box proposal)
- 训练方式:
- 轮流训练
- 近似联合训练
- 联合训练
整个结构: