细节想看原网址
1、https://www.cnblogs.com/gaoxiang12/p/4669490.html
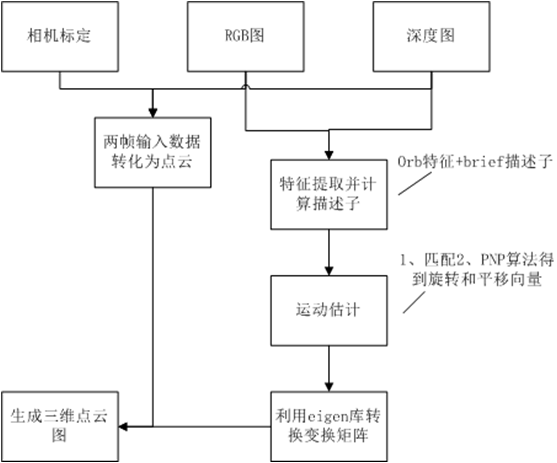
一起做(4)jointPointCloud.cpp
两帧深度相机采集的图像拼接成点云地图
1、设备:RGB-D相机 采集得到彩色图和深度图,在这里认为其采集的两幅图像是同步的;
2、相机采集的图像因镜头原因会发生畸变,所以需要对摄像头进行畸变校正,这样就可以运用matlab自带的棋盘格标定方法完成相机内参的标定;
3、对RGB图进行特征提取与描述子的计算,利用上述特征进行两帧图像的匹配,将匹配得到的两组点集利用PNP算法,得到旋转与平移向量
4、将两帧图形成的点云图经过变换矩阵,既可得到拼接后的点云图
2、https://www.cnblogs.com/gaoxiang12/p/4719156.html
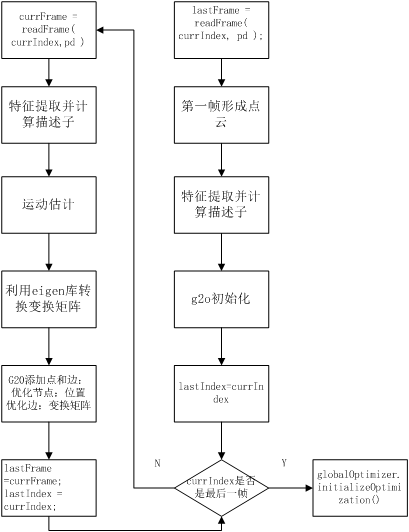
一起做(5)slamBase.cpp
v 多帧深度相机采集的图像拼接成点云地图完成一个视觉里程计
v 什么是视觉里程计呢?简而言之,就是把新来的数据与上一帧进行匹配,估计其运动,然后再把运动累加起来的东西

3、https://www.cnblogs.com/gaoxiang12/p/4739934.html
一起做(6)slamEnd.cpp
v 这样的视觉里程计存在的问题
1、一旦出现了错误匹配,整个程序就会跑飞。
2、误差会累积。常见的现象是:相机转过去的过程能够做对,但转回来之后则出现明显的偏差。
3、效率方面不尽如人意。在线的点云显示比较费时。
v 解决办法
加入姿态图(pose graph)
以g2o软件包进行图优化
4、https://www.cnblogs.com/gaoxiang12/p/4754948.html
一起做(7)slam.cpp
v G2o软件包也可以用来进行回环检测,丢失恢复等工作。
v 加入简单的回环检测(这个可能存在细节误差,回环检测之后仍然会继续提取关键帧,最后还是一起优化,不知道为什么没有对回环进行立即优化,也可能理解有问题)
