运行roscore后,出现下图这种情况(unable to contact my own server)

原因是找不到http://后面那些,ping不到域名或IP。
参考http://www.ros.org/wiki/ROS/NetworkSetup官方的解决办法还有
参考 无法运行roscore,小海龟的部分故障问题解决 - WY_star1的博客 - CSDN博客
https://blog.csdn.net/WY_star1/article/details/81603977
以下是我解决这个问题的办法:
(1)采用了单机配置命令
export ROS_HOSTNAME=localhost
export ROS_MASTER_URI=http://localhost:11311
(2)打开bashrc文件需要在文件中修改
gedit ~/.bashrc
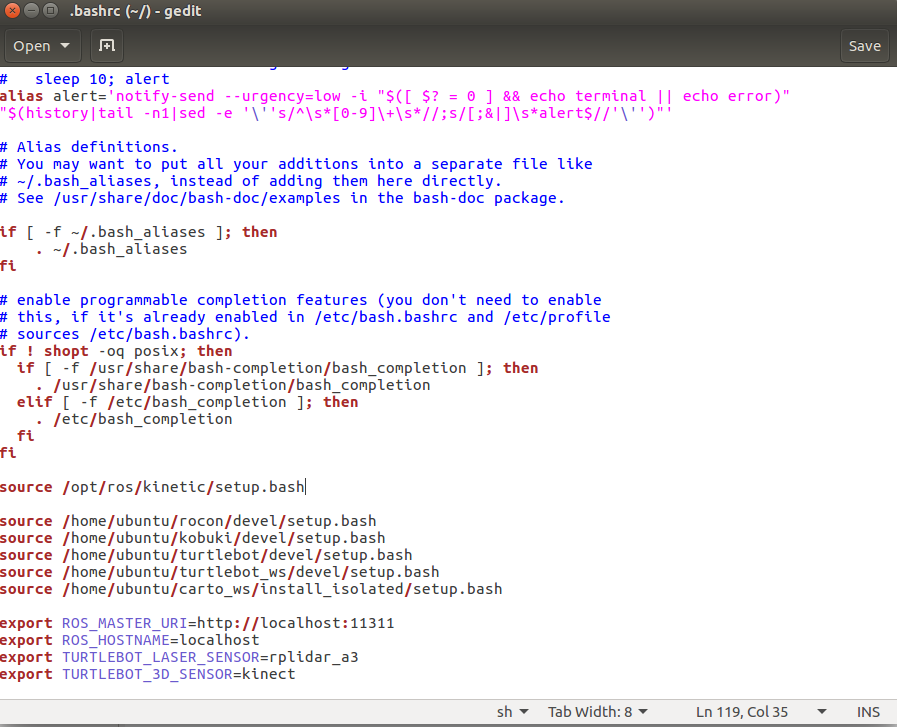
修改一下两个指令:修改后Save
export ROS_HOSTNAME=localhost
export ROS_MASTER_URI=http://localhost:11311
接下来,我们在运行roscore就可以啦
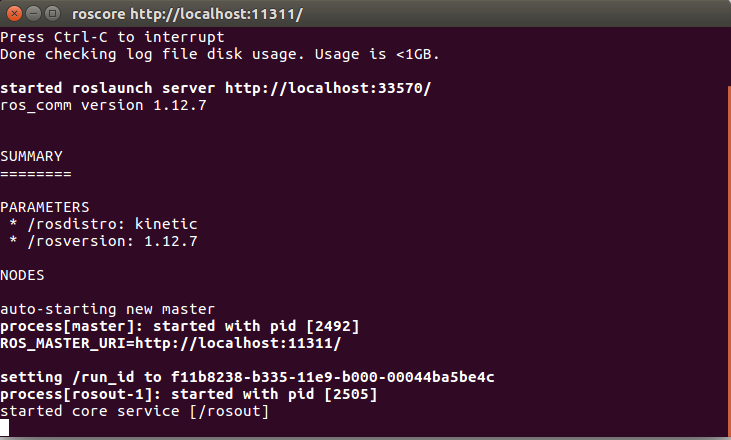
显示这样就是正确的,在Beginner Tutorials中有一个简单的示例程序。小乌龟
1、在Terminal中运行以下命令:
roscore
2、新开一个terminal,运行以下命令,弹出一个小乌龟窗口:
rosrun turtlesim turtlesim_node

3、新开一个terminal,运行以下命令,打开乌龟控制窗口,可使用方向键控制乌龟运动:
rosrun turtlesim turtle_teleop_key
4、选中控制窗口,按方向键,可看到小乌龟窗口中乌龟在运动。
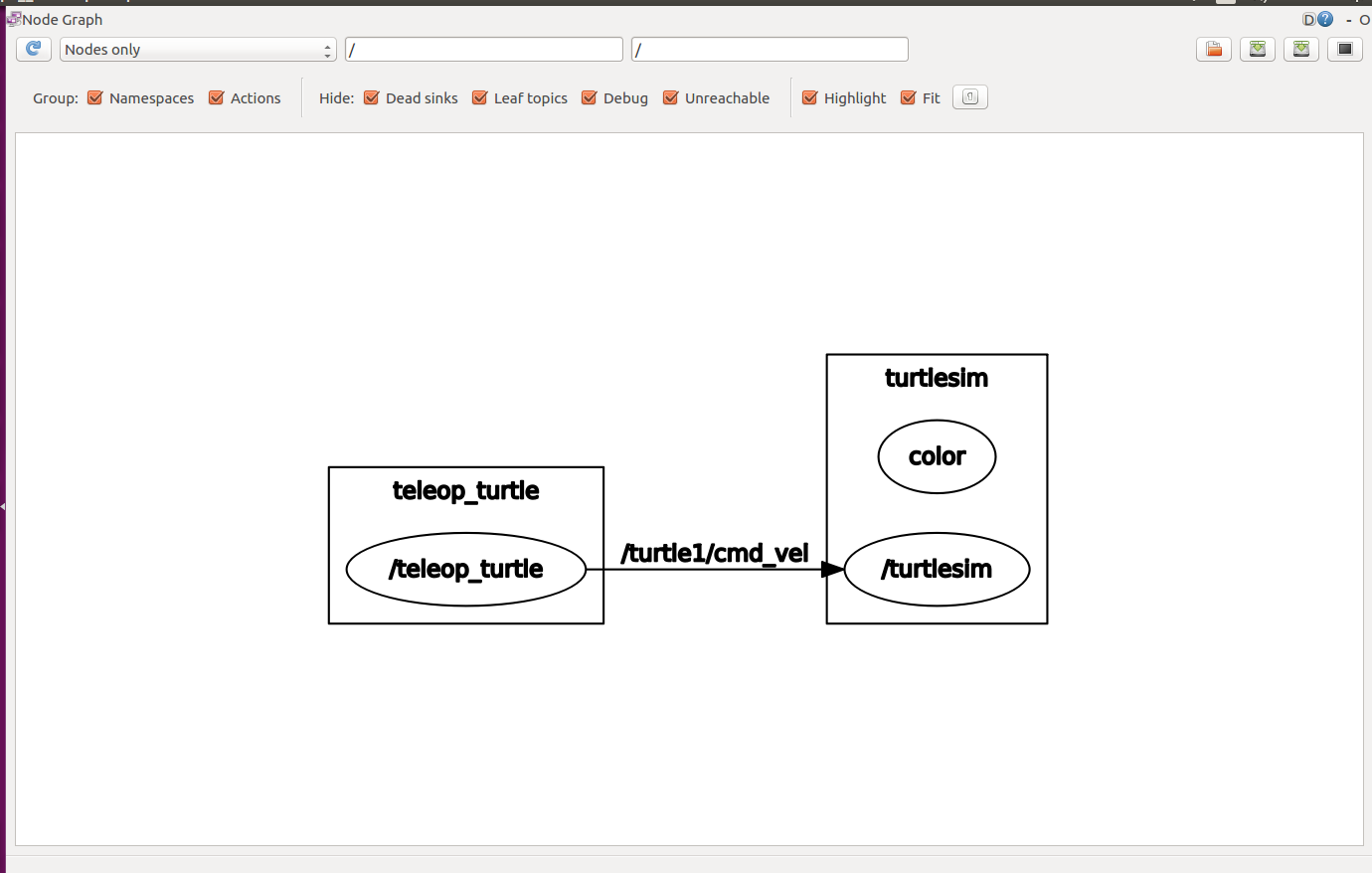
5、新开一个terminal,运行以下命令,可以看到ROS的图形化界面,展示结点的关系:
rosrun rqt_graph rqt_graph