import tensorflow as tf
from numpy.random import RandomState
常用函数与运算
tf.clip_by_value函数将张量限定在一定的范围内:
sess = tf.InteractiveSession()
v = tf.constant([[1., 2., 3.], [4., 5., 6.]])
tf.clip_by_value(v, 2.5, 4.5).eval() # 小于2.5的数值设为2.5,大于4.5的数值设为4.5
array([[ 2.5, 2.5, 3. ],
[ 4. , 4.5, 4.5]], dtype=float32)
tf.log 对张量所有元素进行对数运算
tf.log(v).eval()
array([[ 0. , 0.69314718, 1.09861231],
[ 1.38629436, 1.60943794, 1.79175949]], dtype=float32)
v1 = tf.constant([[1., 2.], [3., 4.]])
v2 = tf.constant([[5., 6.], [7., 8.]])
(v1 * v2).eval() # 对应元素相乘
array([[ 5., 12.],
[ 21., 32.]], dtype=float32)
tf.matmul(v1, v2).eval() # 矩阵乘法
array([[ 19., 22.],
[ 43., 50.]], dtype=float32)
tf.reduce_mean(v).eval()
3.5
tf.reduce_mean(input_tensor, axis=None, keep_dims=False, name=None, reduction_indices=None)
Computes the mean of elements across dimensions of a tensor.
x = tf.constant([[1., 1.], [2., 2.]])
print(tf.reduce_mean(x).eval())
print(tf.reduce_mean(x, 0).eval())
print(tf.reduce_mean(x, 1).eval())
1.5
[ 1.5 1.5]
[ 1. 2.]
tf.reduce_mean(tf.square(v1 - v2)).eval()
16.0
自定义损失函数
$$
f(x,y) =
egin{cases}
a(x - y) & x > y \
b(y - x) & x leq y
end{cases}
$$
v1 = tf.constant([1., 2., 3., 4.])
v2 = tf.constant([4., 3., 2., 1.])
f = tf.greater(v1, v2)
f.eval()
array([False, False, True, True], dtype=bool)
tf.where(f, v1, v2).eval()
array([ 4., 3., 3., 4.], dtype=float32)
1. 定义神经网络的相关参数和变量。
batch_size = 8
# 两个输入节点
x = tf.placeholder(tf.float32, shape=(None, 2), name="x-input")
# 回归问题一般只有一个输出节点
y_ = tf.placeholder(tf.float32, shape=(None, 1), name='y-input')
w1= tf.Variable(tf.random_normal([2, 1], stddev=1, seed=1))
y = tf.matmul(x, w1)
2. 设置自定义的损失函数。
# 定义损失函数使得预测少了的损失大,于是模型应该偏向多的方向预测。
loss_less = 10
loss_more = 1
loss = tf.reduce_sum(tf.where(tf.greater(y, y_), (y - y_) * loss_more, (y_ - y) * loss_less))
train_step = tf.train.AdamOptimizer(0.001).minimize(loss)
3. 生成模拟数据集。
rdm = RandomState(1)
X = rdm.rand(128,2)
# 加入不可预测的噪音(均值为0 的小量),以此观察不同的损失函数对预测结果的影响
Y = [[x1+x2+(rdm.rand()/10.0-0.05)] for (x1, x2) in X]
4. 训练模型。
with tf.Session() as sess:
init_op = tf.global_variables_initializer()
sess.run(init_op)
STEPS = 5000
for i in range(STEPS):
start = (i*batch_size) % 128
end = (i*batch_size) % 128 + batch_size
sess.run(train_step, feed_dict={x: X[start:end], y_: Y[start:end]})
if i % 1000 == 0:
print("After %d training step(s), w1 is: " % (i))
print(sess.run(w1), "
")
print("Final w1 is:
", sess.run(w1))
After 0 training step(s), w1 is:
[[-0.81031823]
[ 1.4855988 ]]
After 1000 training step(s), w1 is:
[[ 0.01247112]
[ 2.1385448 ]]
After 2000 training step(s), w1 is:
[[ 0.45567414]
[ 2.17060661]]
After 3000 training step(s), w1 is:
[[ 0.69968724]
[ 1.8465308 ]]
After 4000 training step(s), w1 is:
[[ 0.89886665]
[ 1.29736018]]
Final w1 is:
[[ 1.01934695]
[ 1.04280889]]
5. 重新定义损失函数,使得预测多了的损失大,于是模型应该偏向少的方向预测。
loss_less = 1
loss_more = 10
loss = tf.reduce_sum(tf.where(tf.greater(y, y_), (y - y_) * loss_more, (y_ - y) * loss_less))
train_step = tf.train.AdamOptimizer(0.001).minimize(loss)
with tf.Session() as sess:
init_op = tf.global_variables_initializer()
sess.run(init_op)
STEPS = 5000
for i in range(STEPS):
start = (i*batch_size) % 128
end = (i*batch_size) % 128 + batch_size
sess.run(train_step, feed_dict={x: X[start:end], y_: Y[start:end]})
if i % 1000 == 0:
print("After %d training step(s), w1 is: " % (i))
print(sess.run(w1), "
")
print("Final w1 is:
", sess.run(w1))
After 0 training step(s), w1 is:
[[-0.81231821]
[ 1.48359871]]
After 1000 training step(s), w1 is:
[[ 0.18643527]
[ 1.07393336]]
After 2000 training step(s), w1 is:
[[ 0.95444274]
[ 0.98088616]]
After 3000 training step(s), w1 is:
[[ 0.95574027]
[ 0.9806633 ]]
After 4000 training step(s), w1 is:
[[ 0.95466018]
[ 0.98135227]]
Final w1 is:
[[ 0.95525807]
[ 0.9813394 ]]
6. 定义损失函数为MSE。
loss = tf.losses.mean_squared_error(y, y_)
train_step = tf.train.AdamOptimizer(0.001).minimize(loss)
with tf.Session() as sess:
init_op = tf.global_variables_initializer()
sess.run(init_op)
STEPS = 5000
for i in range(STEPS):
start = (i*batch_size) % 128
end = (i*batch_size) % 128 + batch_size
sess.run(train_step, feed_dict={x: X[start:end], y_: Y[start:end]})
if i % 1000 == 0:
print("After %d training step(s), w1 is: " % (i))
print(sess.run(w1), "
")
print("Final w1 is:
", sess.run(w1))
After 0 training step(s), w1 is:
[[-0.81031823]
[ 1.4855988 ]]
After 1000 training step(s), w1 is:
[[-0.13337609]
[ 1.81309223]]
After 2000 training step(s), w1 is:
[[ 0.32190299]
[ 1.52463484]]
After 3000 training step(s), w1 is:
[[ 0.67850214]
[ 1.25297272]]
After 4000 training step(s), w1 is:
[[ 0.89473999]
[ 1.08598232]]
Final w1 is:
[[ 0.97437561]
[ 1.0243336 ]]
神经网络优化算法
- 反向传播算法(
backpropagation): 在所有参数上使用梯度下降算法,是训练神经网络的核心算法 - 梯度下降算法(
gradient decent): 优化单个参数的取值
记 ( heta) 为神经网络的参数,(J( heta)) 表示给定的参数取值下,训练数据集上损失函数的大小,因而神经网络的优化过程可以转化为寻找使得(J( heta)) 最小的 ( heta) 的过程。
使用梯度下降法,迭代更新参数 ( heta) ,不断沿着梯度反方向让参数朝着总损失更小的方向更新。
对于( heta) 梯度为(frac{partial J( heta)}{partial heta})
定义学习率 (eta) 为每次参数更新的幅度。
学习率的设置
假设我们要最小化函数 (y=x^2), 选择初始点 (x_0=5)
1. 学习率为1的时候,x在5和-5之间震荡。
import tensorflow as tf
TRAINING_STEPS = 10
LEARNING_RATE = 1
x = tf.Variable(tf.constant(5, dtype=tf.float32), name="x")
y = tf.square(x)
train_op = tf.train.GradientDescentOptimizer(LEARNING_RATE).minimize(y)
with tf.Session() as sess:
sess.run(tf.global_variables_initializer())
for i in range(TRAINING_STEPS):
sess.run(train_op)
x_value = sess.run(x)
print("After %s iteration(s): x%s is %f."% (i+1, i+1, x_value))
After 1 iteration(s): x1 is -5.000000.
After 2 iteration(s): x2 is 5.000000.
After 3 iteration(s): x3 is -5.000000.
After 4 iteration(s): x4 is 5.000000.
After 5 iteration(s): x5 is -5.000000.
After 6 iteration(s): x6 is 5.000000.
After 7 iteration(s): x7 is -5.000000.
After 8 iteration(s): x8 is 5.000000.
After 9 iteration(s): x9 is -5.000000.
After 10 iteration(s): x10 is 5.000000.
2. 学习率为0.001的时候,下降速度过慢,在901轮时才收敛到0.823355。
TRAINING_STEPS = 1000
LEARNING_RATE = 0.001
x = tf.Variable(tf.constant(5, dtype=tf.float32), name="x")
y = tf.square(x)
train_op = tf.train.GradientDescentOptimizer(LEARNING_RATE).minimize(y)
with tf.Session() as sess:
sess.run(tf.global_variables_initializer())
for i in range(TRAINING_STEPS):
sess.run(train_op)
if i % 100 == 0:
x_value = sess.run(x)
print("After %s iteration(s): x%s is %f."% (i+1, i+1, x_value))
After 1 iteration(s): x1 is 4.990000.
After 101 iteration(s): x101 is 4.084646.
After 201 iteration(s): x201 is 3.343555.
After 301 iteration(s): x301 is 2.736923.
After 401 iteration(s): x401 is 2.240355.
After 501 iteration(s): x501 is 1.833880.
After 601 iteration(s): x601 is 1.501153.
After 701 iteration(s): x701 is 1.228794.
After 801 iteration(s): x801 is 1.005850.
After 901 iteration(s): x901 is 0.823355.
3. 使用指数衰减的学习率,在迭代初期得到较高的下降速度,可以在较小的训练轮数下取得不错的收敛程度。
tf.train.exponential_decay函数指数衰减学习率。
tf.train.exponential_decay(learning_rate, global_step, decay_steps, decay_rate, staircase=False, name=None)
learning_rate:事先设定的初始学习率decay_steps: 衰减速度,staircase = True时代表了完整的使用一遍训练数据所需要的迭代轮数(= 总训练样本数/每个batch中的训练样本数)decay_rate: 衰减系数staircase: 默认为False,此时学习率随迭代轮数的变化是连续的(指数函数);为True时,global_step/decay_steps会转化为整数,此时学习率便是阶梯函数(staircase function)
TRAINING_STEPS = 100
global_step = tf.Variable(0)
LEARNING_RATE = tf.train.exponential_decay(0.1, global_step, 1, 0.96, staircase=True)
x = tf.Variable(tf.constant(5, dtype=tf.float32), name="x")
y = tf.square(x)
train_op = tf.train.GradientDescentOptimizer(LEARNING_RATE).minimize(y, global_step=global_step)
with tf.Session() as sess:
sess.run(tf.global_variables_initializer())
for i in range(TRAINING_STEPS):
sess.run(train_op)
if i % 10 == 0:
LEARNING_RATE_value = sess.run(LEARNING_RATE)
x_value = sess.run(x)
print("After %s iteration(s): x%s is %f, learning rate is %f."% (i+1, i+1, x_value, LEARNING_RATE_value))
After 1 iteration(s): x1 is 4.000000, learning rate is 0.096000.
After 11 iteration(s): x11 is 0.690561, learning rate is 0.063824.
After 21 iteration(s): x21 is 0.222583, learning rate is 0.042432.
After 31 iteration(s): x31 is 0.106405, learning rate is 0.028210.
After 41 iteration(s): x41 is 0.065548, learning rate is 0.018755.
After 51 iteration(s): x51 is 0.047625, learning rate is 0.012469.
After 61 iteration(s): x61 is 0.038558, learning rate is 0.008290.
After 71 iteration(s): x71 is 0.033523, learning rate is 0.005511.
After 81 iteration(s): x81 is 0.030553, learning rate is 0.003664.
After 91 iteration(s): x91 is 0.028727, learning rate is 0.002436.
正则化
w = tf.constant([[1., -2.], [-3, 4]])
with tf.Session() as sess:
print(sess.run(tf.contrib.layers.l1_regularizer(.5)(w))) # 0.5 为权重
print(sess.run(tf.contrib.layers.l2_regularizer(.5)(w)))
5.0
7.5
1. 生成模拟数据集。
import tensorflow as tf
import matplotlib.pyplot as plt
import numpy as np
data = []
label = []
np.random.seed(0)
# 以原点为圆心,半径为1的圆把散点划分成红蓝两部分,并加入随机噪音。
for i in range(150):
x1 = np.random.uniform(-1,1)
x2 = np.random.uniform(0,2)
if x1**2 + x2**2 <= 1:
data.append([np.random.normal(x1, 0.1),np.random.normal(x2,0.1)])
label.append(0)
else:
data.append([np.random.normal(x1, 0.1), np.random.normal(x2, 0.1)])
label.append(1)
data = np.hstack(data).reshape(-1,2)
label = np.hstack(label)
plt.scatter(data[:,0], data[:,1], c=label,
cmap="RdBu", vmin=-.2, vmax=1.2, edgecolor="white")
plt.show()

2. 定义一个获取权重,并自动加入正则项到损失的函数。
由于集合(collection)可以在计算图 (tf.Graph) 中保存一组实体(比如张量),故它可以计算带 L2 正则化的损失函数的方法。
tf.add_to_collection 函数将这个新生成变量的 L2 正则化损失项加入集合,此函数的第一个参数是集合的名字,第二个参数是要加入这个集合的内容。
# 获取一层神经网络边上的权重,并将这个权重的 L2 正则化损失加入名称为 'losses' 的集合中
def get_weight(shape, lambda1):
# 生成一个变量
var = tf.Variable(tf.random_normal(shape), dtype = tf.float32)
tf.add_to_collection('losses', tf.contrib.layers.l2_regularizer(lambda1)(var))
# 返回生成的变量
return var
3. 定义神经网络。
x = tf.placeholder(tf.float32, shape=(None, 2))
y_ = tf.placeholder(tf.float32, shape=(None, 1))
sample_size = len(data)
# 每层节点的个数
layer_dimension = [2,10,5,3,1]
# 神经网络的层数
n_layers = len(layer_dimension)
# 这个变量维护前向传播时最深层的节点,开始的时候就是输入层
cur_layer = x
# 当前层的节点数
in_dimension = layer_dimension[0]
# 循环生成网络结构
for i in range(1, n_layers):
# layer_dimension[i]为下一层的节点个数
out_dimension = layer_dimension[i]
# 生成当前层中权重的变量,并将这个变量的 L2 正则化损失加入计算图上的集合
weight = get_weight([in_dimension, out_dimension], 0.003)
bias = tf.Variable(tf.constant(0.1, shape=[out_dimension]))
# 使用eLU激活函数
cur_layer = tf.nn.elu(tf.matmul(cur_layer, weight) + bias)
# 进入下层之前的节点个数更新为当前层节点个数
in_dimension = layer_dimension[i]
y = cur_layer
# 在定义神经网络前向传播的同时已经将所有的L2正则化损失加入了图上的集合,
# 这里只需要计算刻画模型在训练数据上表现的损失函数
mse_loss = tf.reduce_sum(tf.pow(y_ - y, 2)) / sample_size
# mse_loss = tf.reduce_mean(tf.square(y_ - y))
# 将均方误差损失函数加入损失集合
tf.add_to_collection('losses', mse_loss)
# tf.get_collection 返回一个列表(所有这个集合中的元素)
# 在这个样例中,这些元素就是损失函数的不同部分,将它们加起来就可以得到最终的损失函数
loss = tf.add_n(tf.get_collection('losses'))
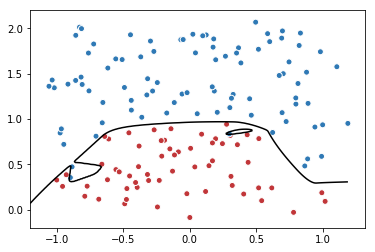
4. 训练不带正则项的损失函数mse_loss。
过拟合:当一个模型过为复杂之后,它可以很好地“记忆”每个训练数据中随机噪音的部分而忘记去“学习”训练数据的通用趋势。
# 定义训练的目标函数mse_loss,训练次数及训练模型
train_op = tf.train.AdamOptimizer(0.001).minimize(mse_loss)
TRAINING_STEPS = 40000
with tf.Session() as sess:
tf.global_variables_initializer().run()
for i in range(TRAINING_STEPS):
sess.run(train_op, feed_dict={x: data, y_: label})
if i % 2000 == 0:
print("After %d steps, mse_loss: %f" % (i,sess.run(mse_loss, feed_dict={x: data, y_: label})))
# 画出训练后的分割曲线
xx, yy = np.mgrid[-1.2:1.2:.01, -0.2:2.2:.01]
grid = np.c_[xx.ravel(), yy.ravel()]
probs = sess.run(y, feed_dict={x:grid})
probs = probs.reshape(xx.shape)
plt.scatter(data[:,0], data[:,1], c=label,
cmap="RdBu", vmin=-.2, vmax=1.2, edgecolor="white")
plt.contour(xx, yy, probs, levels=[.5], cmap="Greys", vmin=0, vmax=.1)
plt.show()
After 0 steps, mse_loss: 1.619369
After 2000 steps, mse_loss: 0.042168
After 4000 steps, mse_loss: 0.026728
After 6000 steps, mse_loss: 0.022706
After 8000 steps, mse_loss: 0.016363
After 10000 steps, mse_loss: 0.007347
After 12000 steps, mse_loss: 0.006512
After 14000 steps, mse_loss: 0.001360
After 16000 steps, mse_loss: 0.000292
After 18000 steps, mse_loss: 0.000142
After 20000 steps, mse_loss: 0.000084
After 22000 steps, mse_loss: 0.000056
After 24000 steps, mse_loss: 0.000041
After 26000 steps, mse_loss: 0.000036
After 28000 steps, mse_loss: 0.000030
After 30000 steps, mse_loss: 0.000025
After 32000 steps, mse_loss: 0.000023
After 34000 steps, mse_loss: 0.000021
After 36000 steps, mse_loss: 0.000019
After 38000 steps, mse_loss: 0.000018
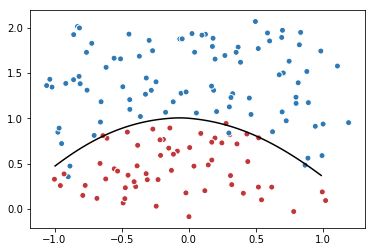
5. 训练带正则项的损失函数loss。
为了避免过拟合问题,一个非常常用的方法是正则化(regularization)。
正则化:在损失函数中加入刻画模型复杂程度的指标。即对于损失函数 (J( heta)) ,需要优化的是 (J( heta) + lambda R(w))。
- (R(w)): 刻画模型复杂程度的指标
- (lambda): 表示模型复杂损失在总损失中的比例
- ( heta): 包括权重 (w) 和偏置项 (b)
L1正则化
使得参数变得更稀疏(即有更多的参数变为0,这样可以达到类似特征选择的功能)
tf.contrib.layers.l1_regularizer()
L2正则化
tf.contrib.layers.l2_regularizer()
L1-L2正则化
# 定义训练的目标函数loss,训练次数及训练模型
train_op = tf.train.AdamOptimizer(0.001).minimize(loss)
TRAINING_STEPS = 40000
with tf.Session() as sess:
tf.global_variables_initializer().run()
for i in range(TRAINING_STEPS):
sess.run(train_op, feed_dict={x: data, y_: label})
if i % 2000 == 0:
print("After %d steps, loss: %f" % (i, sess.run(loss, feed_dict={x: data, y_: label})))
# 画出训练后的分割曲线
xx, yy = np.mgrid[-1:1:.01, 0:2:.01]
grid = np.c_[xx.ravel(), yy.ravel()]
probs = sess.run(y, feed_dict={x:grid})
probs = probs.reshape(xx.shape)
plt.scatter(data[:,0], data[:,1], c=label,
cmap="RdBu", vmin=-.2, vmax=1.2, edgecolor="white")
plt.contour(xx, yy, probs, levels=[.5], cmap="Greys", vmin=0, vmax=.1)
plt.show()
After 0 steps, loss: 1.591393
After 2000 steps, loss: 0.100526
After 4000 steps, loss: 0.066279
After 6000 steps, loss: 0.057447
After 8000 steps, loss: 0.055713
After 10000 steps, loss: 0.055156
After 12000 steps, loss: 0.055092
After 14000 steps, loss: 0.055040
After 16000 steps, loss: 0.054985
After 18000 steps, loss: 0.054964
After 20000 steps, loss: 0.054956
After 22000 steps, loss: 0.054953
After 24000 steps, loss: 0.054952
After 26000 steps, loss: 0.054951
After 28000 steps, loss: 0.054951
After 30000 steps, loss: 0.054951
After 32000 steps, loss: 0.054951
After 34000 steps, loss: 0.054950
After 36000 steps, loss: 0.054950
After 38000 steps, loss: 0.054950
滑动平均模型
滑动平均模型会将每一轮迭代得到的模型综合起来,从而使得最终得到的模型在测试数据上更加健壮(robust)。
tf.train.ExponentialMovingAverage 需要提供一个衰减率(decay)来控制模型更新的速度。
ExponentialMovingAverage 对每一个变量会维护一个影子变量(shadow variable),这个影子变量的初始值就是相应变量的初始值,而每次运行变量更新时,影子变量的值会更新为:
- shadow_variable 为影子变量,
- variable 为待更新变量
- decay 为衰减率,它越大模型越趋于稳定,在实际应用中decay一般会设置为接近 1 的数。
还可以使用 num_updates参数来动态设置decay的大小:
1. 定义变量及滑动平均类
# 定义一个变量用来计算滑动平均,且其初始值为0,类型必须为实数
v1 = tf.Variable(0, dtype=tf.float32)
# step变量模拟神经网络中迭代的轮数,可用于动态控制衰减率
step = tf.Variable(0, trainable=False)
# 定义一个滑动平均的类(class)。初始化时给定了衰减率为0.99和控制衰减率的变量step
ema = tf.train.ExponentialMovingAverage(0.99, step)
# 定义一个更新变量滑动平均的操作。这里需要给定一个列表,每次执行这个操作时,此列表中的变量都会被更新。
maintain_averages_op = ema.apply([v1])
2. 查看不同迭代中变量取值的变化。
with tf.Session() as sess:
# 初始化
init_op = tf.global_variables_initializer()
sess.run(init_op)
# 通过ema.average(v1)获取滑动平均后的变量取值。在初始化之后变量v1的值和v1 的滑动平均均为0
print(sess.run([v1, ema.average(v1)]))
# 更新变量v1的取值
sess.run(tf.assign(v1, 5))
sess.run(maintain_averages_op)
print(sess.run([v1, ema.average(v1)]))
# 更新step和v1的取值
sess.run(tf.assign(step, 10000))
sess.run(tf.assign(v1, 10))
sess.run(maintain_averages_op)
print(sess.run([v1, ema.average(v1)]))
# 更新一次v1的滑动平均值
sess.run(maintain_averages_op)
print(sess.run([v1, ema.average(v1)]))
[0.0, 0.0]
[5.0, 4.5]
[10.0, 4.5549998]
[10.0, 4.6094499]