前言
在用数据对模型进行训练时,通常会遇到维度过高,也就是数据的特征太多的问题,有时特征之间还存在一定的相关性,这时如果还使用原数据训练模型,模型的精度会大大下降,因此要降低数据的维度,同时新数据的特征之间还要保持线性无关,这样的方法称为主成分分析(Principal component analysis,PCA),新数据的特征称为主成分,得到主成分的方法有两种:直接对协方差矩阵进行特征值分解和对数据矩阵进行奇异值分解(SVD)。
一、主成分分析基本思想
数据X由n个特征降维到k个特征,这k个特征保留最大信息(方差)。对原坐标系中的数据进行主成分分析等价于进行坐标系的旋转变化,将数据投影到新的坐标系下,新坐标系的第一坐标轴表示第一主成分,第二坐标轴表示第二主成分,以此类推。数据在每一轴上的坐标值的平方表示相应变量的方差,PCA的目标就是方差最大的变量,才能保留尽可能多的信息,因为方差越大,表示数据分散程度越大,所包含的信息也就越多。
二、PCA的基本步骤
- step1:对数据进行规范化(也称为标准化),因为涉及距离计算,因此要消除量纲的影响;
这里的数据标准化采用z-score:X = X - mean(X) / std(X) - step2:对数据X进行旋转变化(前言提到的两种方法)
三、数学推导
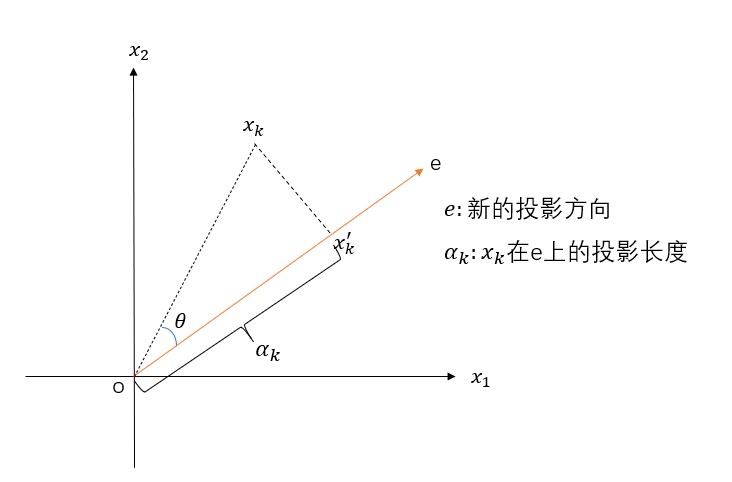
假设X是m*n的矩阵,(x_k)是投影前的数据(k=1,2,…,n),(x_k^{'})是投影后的数据,e是新的坐标轴。投影长度(α_k=e^tx_k),可以将(e^t)看成是cosθ,新数据(x_k^{'})在新坐标轴e下的坐标为(α_k e),表示从原点出发,沿着e方向走了(α_k)距离。根据方差最大的原则,即(α_k)要最大,由勾股定理(alpha_k^2+left | x_kx_k{'} ight |^2=left|o x_k ight|^2)可知,当(α_k)最大时,(left|x_kx_k^{'} ight|^2)要最小,因此转换成求(left|x_kx_k^{'} ight|^2)最小,约束条件是(left|e ight|=1),数学表达式为:
1. 完整的数学推导(结合第一部分的图)
(min J(e)\ =sum_{i=1}^nleft|x_k^{'}-x_k ight|^2\ =sum_{i=1}^nleft|alpha_ke-x_k ight|^2\ =sum_{i=1}^nalpha_k^2left|e ight|^2 - 2sum_{i=1}^nalpha_ke^tx_k + sum_{i=1}^nleft|x_k ight|^2\ =sum_{i=1}^nalpha_k^2-2sum_{i=1}^nalpha_k^2+sum_{i=1}^nleft|x_k ight|^2\ =-sum_{i=1}^nalpha_k^2+sum_{i=1}^nleft|x_k ight|^2\ =-sum_{i=1}^ne^tx_kx_k^te+sum_{i=1}^nleft|x_k ight|^2)
要使(-sum_{i=1}^ne^tx_kx_k^te+sum_{i=1}^nleft|x_k ight|^2)最小,由于(sum_{i=1}^nleft|x_k ight|^2)不包含e,因为转换为求(sum_{i=1}^ne^tx_kx_k^te)的最大值,同时记(S=sum_{i=1}^nx_kx_k^t),实际上,S是协方差X的协方差矩阵,问题可转化为
对于上述优化问题,可以用拉格朗日乘子法求解:(u=e^tSe-lambda(e^te-1),frac{partial u}{partial e} = 2Se-2lambda e=0),解得:(Se = lambda e)
可以看出,满足条件的投影方向e(k个)是协方差矩阵S的前k大特征值对应的特征向量,因此PCA转化为求数据X的协方差矩阵的特征值,将特征值降序排序,对应的特征向量构成的矩阵就是所求的旋转矩阵
2. 求旋转矩阵
- 基于特征值求解
- 基于奇异值分解SVD
2.1 基于特征值求解
就是一般的矩阵求特征值和特征向量的问题,此处不做详细介绍,需要注意的是,是对数据X的协方差矩阵(X^TX)求特征值和特征向量,前k个特征向量构成的矩阵P(此处默认P已经按照特征值的大小顺序进行排列,维度为n*k),那么新数据(newX = X*P),则newX由X的(m*n)变成(m*k(k<n)),此时数据已经降低维度了。
2.2 基于SVD求解PCA
三、奇异值分解SVD
3.1 什么是奇异值分解
对于任意的矩阵(Ainmathbb{R}^{m*n}),都可以将A分解成三个矩阵:
并且U和V是正交阵,(sum)是对角阵,即
3.2 奇异值分解的几何解释
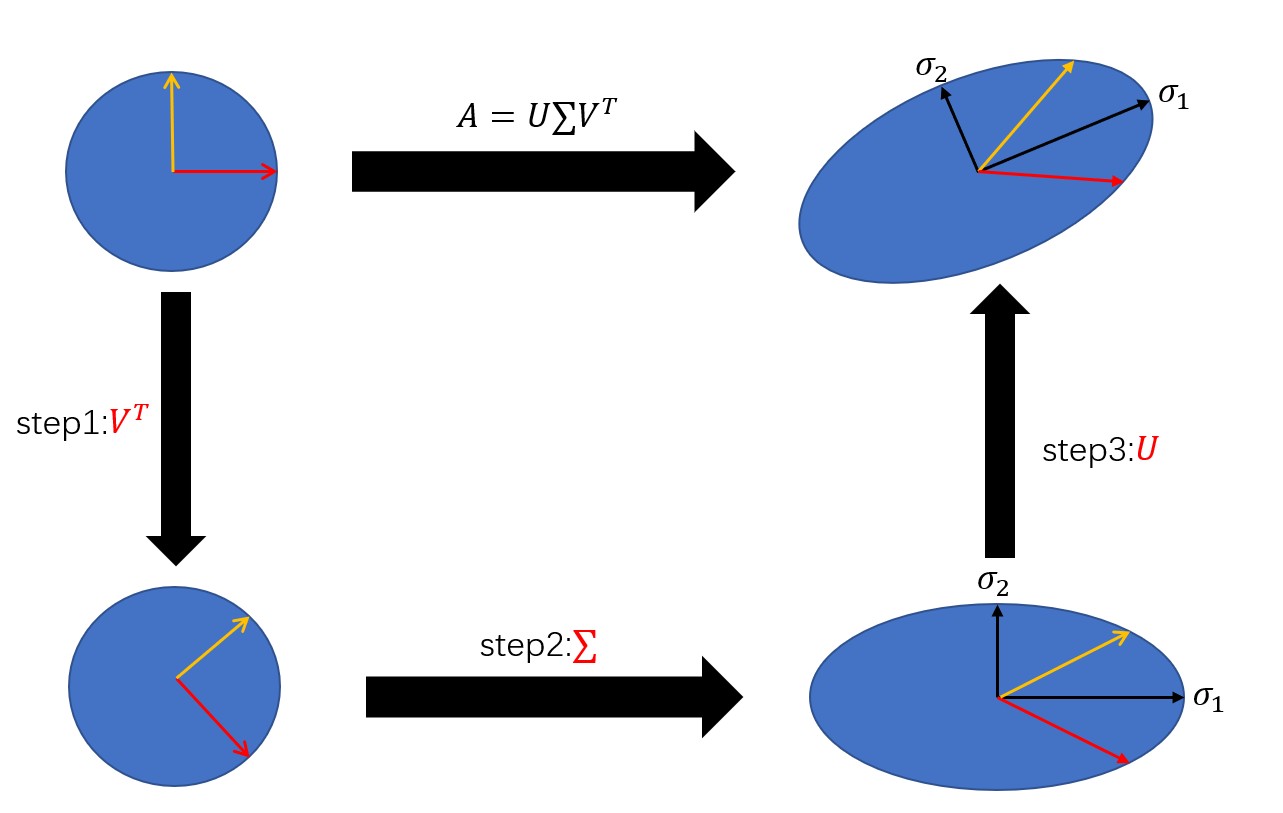
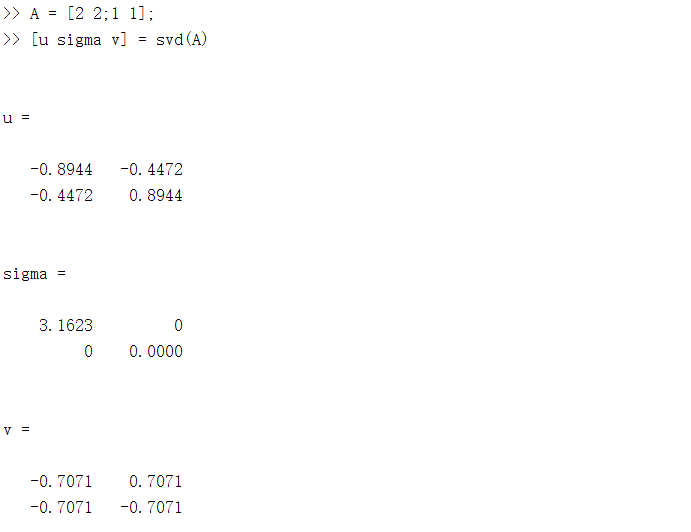
本质上来说,奇异值分解是一个线性变换,对矩阵A进行奇异值分解可以看成是用一组正交基先进行旋转((V^T e)),再进行坐标缩放((sum V^T e)),最后再进行坐标旋转((Usum V^T e)),经过这三步操作,正交基可以变换成A,下面是一个简单的例子,用MATLAB可以对任意矩阵进行奇异值分解,并且输出三个矩阵。
3.3 如何求解(U,sum,V^T)
(以下由于编辑问题,会出现几个(sum^T)的T出现在(sum)上面)
对于任意的矩阵都能进行因子分解,这显然是SVD最大的好处,但关键是如何求解三个因子矩阵呢?
3.3.1 求解U
已知(A=Usum V^T),则有
又因为U是正交阵,因此有
左右各乘以(U^{-1}),可以得到
也就是U是矩阵(AA^T)的特征向量,((sumsum^T))是特征值。
3.3.2 求解V
与求解U类似,通过(AA^T)来求解,最终可以得到
也就是V是矩阵(A^TA)的特征向量,((sum^Tsum))是特征值
3.3.3 对角矩阵(sum)
(sum)里的元素成为奇异值,从3.3.1和3.3.2可以看出,对角矩阵(sum)的奇异值是(AA^T)和(A^TA)的特征值的平方根,并且奇异值一定不小于0.以下是简单的证明:
令(lambda)是(A^TA)的一个特征值,x是对应的特征向量,则
而奇异值(sigma)是(lambda)的平方根,因此也大于等于0.
3.3.4 SVD与PCA的关系
PCA的目标是求协方差矩阵(X^TX)的特征向量和特征值,而协方差矩阵的特征向量就是矩阵X奇异值分解后的右奇异向量V,用下图来说明PCA与SVD的关系

因此,经过PCA处理得到的新数据,其实就是对数据X做奇异值分解,然后乘上右奇异矩阵,或者左奇异矩阵乘上对角矩阵!
四、总结
PCA是一种降维技术,主要用在特征提取。对于PCA,有两种方式:直接对数据的协方差矩阵进行特征向量的求解;对数据进行奇异值分解。实际上,后者会更优于前者。因为求解协方差矩阵的特征值以及特征向量时,有时会出现特征值为虚数,那么这时候算法会失效,而SVD求解出来的奇异值一定是非负数。除此之外,其实可以把PCA看做是对SVD的一种包装,如果实现了SVD,那么PCA也就实现了,而且更好的是,用SVD可以得到两个方向的PCA,而直接分解协方差矩阵,只能得到一个方向的PCA。