HRNet是微软亚洲研究院的王井东老师领导的团队完成的,打通图像分类、图像分割、目标检测、人脸对齐、姿态识别、风格迁移、Image Inpainting、超分、optical flow、Depth estimation、边缘检测等网络结构。
王老师在ValseWebinar《物体和关键点检测》中亲自讲解了HRNet,讲解地非常透彻。以下文章主要参考了王老师在演讲中的解读,配合论文+代码部分,来为各位读者介绍这个全能的Backbone-HRNet。
1. 引入
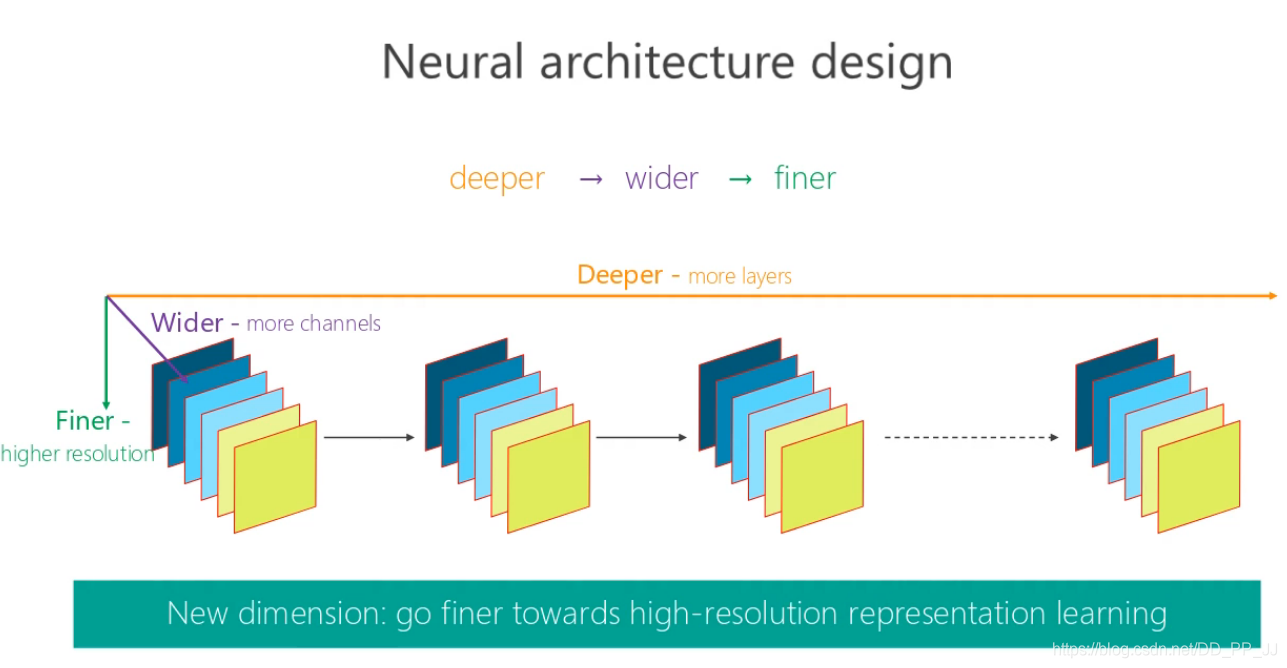
在人体姿态识别这类的任务中,需要生成一个高分辨率的heatmap来进行关键点检测。这就与一般的网络结构比如VGGNet的要求不同,因为VGGNet最终得到的feature map分辨率很低,损失了空间结构。

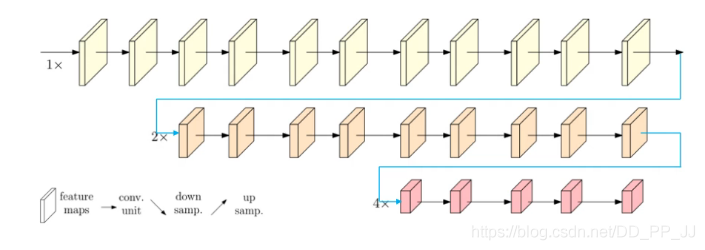
获取高分辨率的方式大部分都是如上图所示,采用的是先降分辨率,然后再升分辨率的方法。U-Net、SegNet、DeconvNet、Hourglass本质上都是这种结构。

2. 核心
普通网络都是这种结构,不同分辨率之间是进行了串联
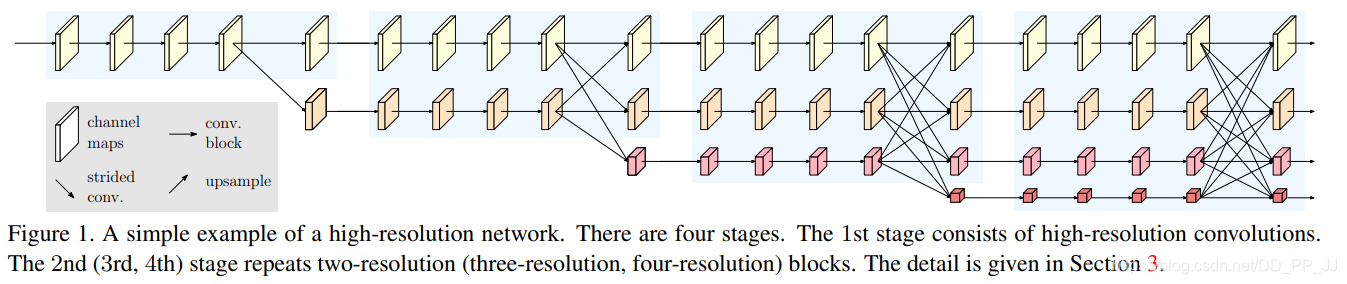
王井东老师则是将不同分辨率的feature map进行并联:
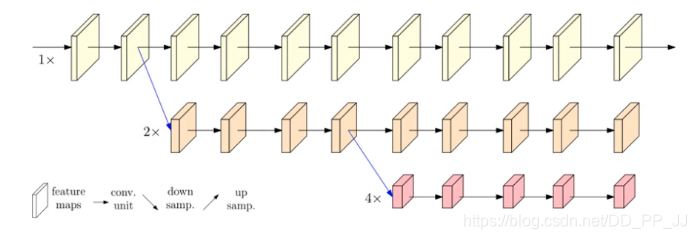
在并联的基础上,添加不同分辨率feature map之间的交互(fusion)。

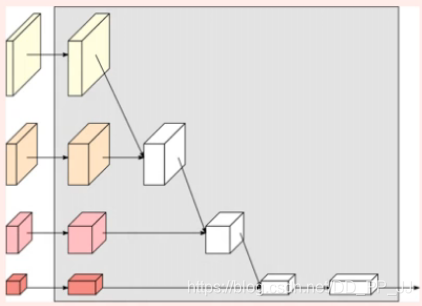
具体fusion的方法如下图所示:

- 同分辨率的层直接复制。
- 需要升分辨率的使用bilinear upsample + 1x1卷积将channel数统一。
- 需要降分辨率的使用strided 3x3 卷积。
- 三个feature map融合的方式是相加。
至于为何要用strided 3x3卷积,这是因为卷积在降维的时候会出现信息损失,使用strided 3x3卷积是为了通过学习的方式,降低信息的损耗。所以这里没有用maxpool或者组合池化。
另外在读HRNet的时候会有一个问题,有四个分支的到底如何使用这几个分支呢?论文中也给出了几种方式作为最终的特征选择。
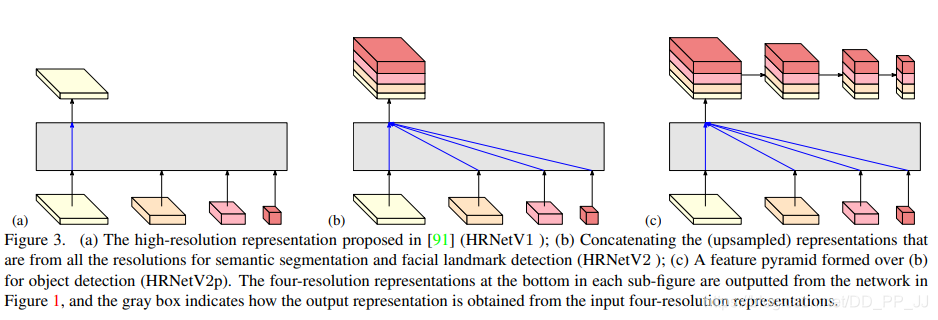
(a)图展示的是HRNetV1的特征选择,只使用分辨率最高的特征图。
(b)图展示的是HRNetV2的特征选择,将所有分辨率的特征图(小的特征图进行upsample)进行concate,主要用于语义分割和面部关键点检测。
(c)图展示的是HRNetV2p的特征选择,在HRNetV2的基础上,使用了一个特征金字塔,主要用于目标检测网络。
再补充一个(d)图
(d)图展示的也是HRNetV2,采用上图的融合方式,主要用于训练分类网络。
总结一下HRNet创新点:
- 将高低分辨率之间的链接由串联改为并联。
- 在整个网络结构中都保持了高分辨率的表征(最上边那个通路)。
- 在高低分辨率中引入了交互来提高模型性能。
3. 效果
3.1 消融实验
- 对交互方法进行消融实验,证明了当前跨分辨率的融合的有效性。
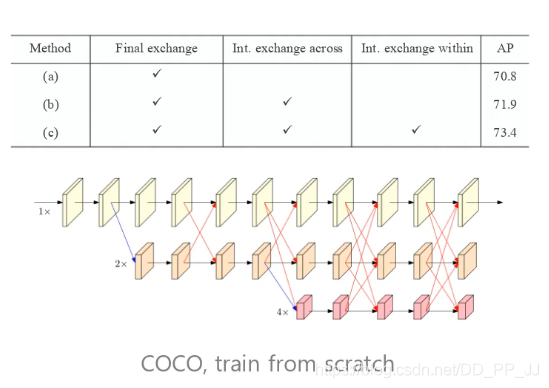
- 证明高分辨率feature map的表征能力

1x代表不进行降维,2x代表分辨率变为原来一半,4x代表分辨率变为原来四分之一。W32、W48中的32、48代表卷积的宽度或者通道数。
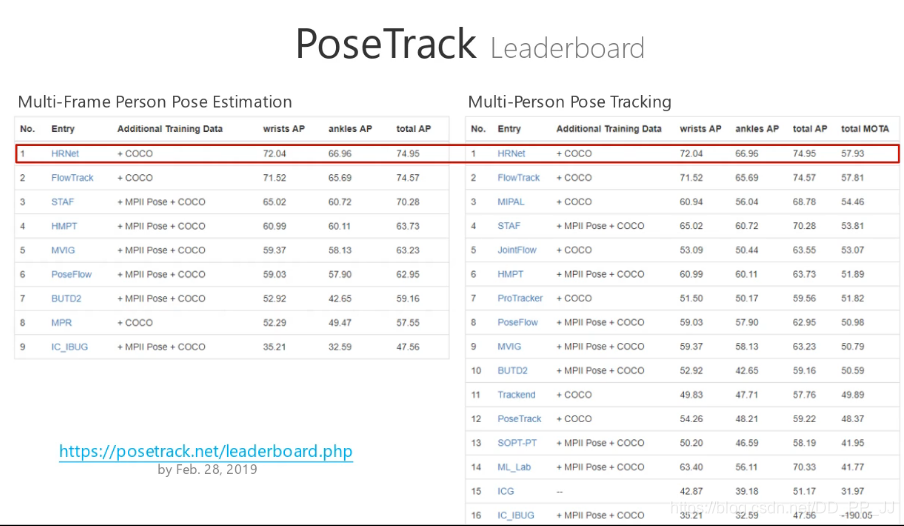
3.2 姿态识别任务上的表现

以上的姿态识别采用的是top-down的方法。
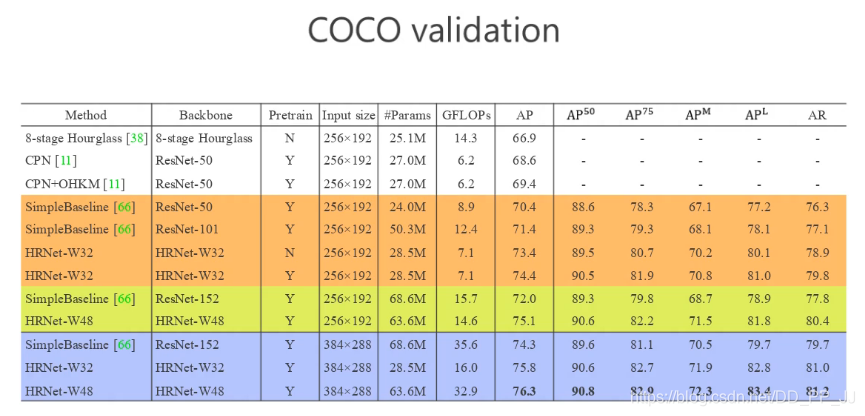
在参数和计算量不增加的情况下,要比其他同类网络效果好很多。

在19年2月28日时的PoseTrack Leaderboard,HRNet占领两个项目的第一名。
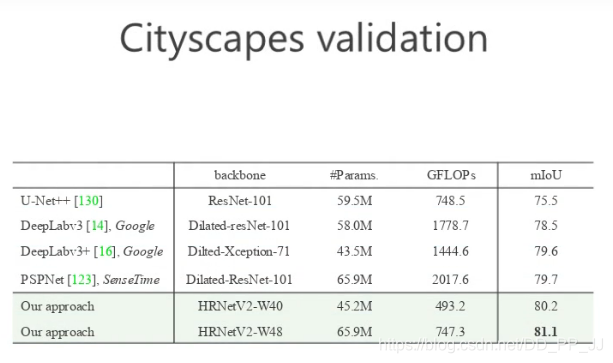
3.3 语义分割任务中的表现

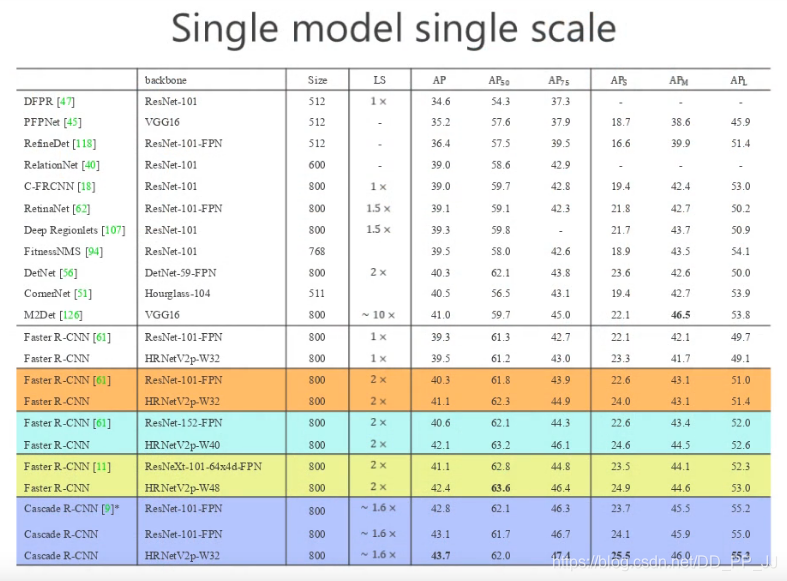
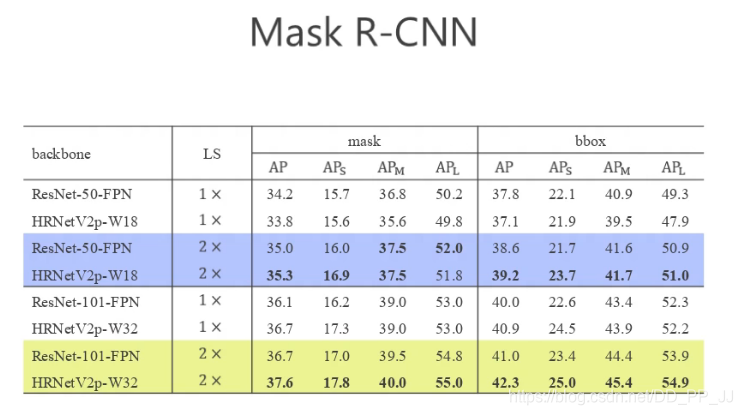
3.4 目标检测任务中的表现
3.5 分类任务上的表现

ps: 王井东老师在这部分提到,分割的网络也需要使用分类的预训练模型,否则结果会差几个点。

以上是HRNet和ResNet结果对比,同一个颜色的都是参数量大体一致的模型进行的对比,在参数两差不多甚至更少的情况下,HRNet能够比ResNet达到更好的效果。
4. 代码
HRNet( https://github.com/HRNet )工作量非常大,构建了六个库涉及语义分割、人体姿态检测、目标检测、图片分类、面部关键点检测、Mask R-CNN等库。全部内容如下图所示:

笔者对HRNet代码构建非常感兴趣,所以以HRNet-Image-Classification库为例,来解析一下这部分代码。
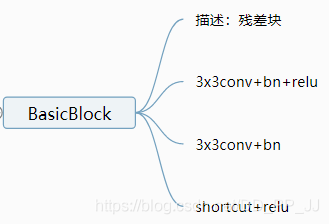
先从简单的入手,BasicBlock
def conv3x3(in_planes, out_planes, stride=1):
"""3x3 convolution with padding"""
return nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride,
padding=1, bias=False)
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = nn.BatchNorm2d(planes, momentum=BN_MOMENTUM)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = nn.BatchNorm2d(planes, momentum=BN_MOMENTUM)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
Bottleneck:
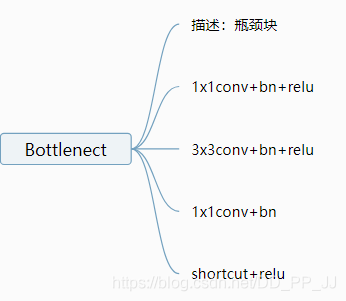
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes, momentum=BN_MOMENTUM)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride,
padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes, momentum=BN_MOMENTUM)
self.conv3 = nn.Conv2d(planes, planes * self.expansion, kernel_size=1,
bias=False)
self.bn3 = nn.BatchNorm2d(planes * self.expansion,
momentum=BN_MOMENTUM)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
HighResolutionModule,这是核心模块, 主要分为两个组件:branches和fuse layer。

class HighResolutionModule(nn.Module):
def __init__(self, num_branches, blocks, num_blocks, num_inchannels,
num_channels, fuse_method, multi_scale_output=True):
'''
调用:
# 调用高低分辨率交互模块, stage2 为例
HighResolutionModule(num_branches, # 2
block, # 'BASIC'
num_blocks, # [4, 4]
num_inchannels, # 上个stage的out channel
num_channels, # [32, 64]
fuse_method, # SUM
reset_multi_scale_output)
'''
super(HighResolutionModule, self).__init__()
self._check_branches(
# 检查分支数目是否合理
num_branches, blocks, num_blocks, num_inchannels, num_channels)
self.num_inchannels = num_inchannels
# 融合选用相加的方式
self.fuse_method = fuse_method
self.num_branches = num_branches
self.multi_scale_output = multi_scale_output
# 两个核心部分,一个是branches构建,一个是融合layers构建
self.branches = self._make_branches(
num_branches, blocks, num_blocks, num_channels)
self.fuse_layers = self._make_fuse_layers()
self.relu = nn.ReLU(False)
def _check_branches(self, num_branches, blocks, num_blocks,
num_inchannels, num_channels):
# 分别检查参数是否符合要求,看models.py中的参数,blocks参数冗余了
if num_branches != len(num_blocks):
error_msg = 'NUM_BRANCHES({}) <> NUM_BLOCKS({})'.format(
num_branches, len(num_blocks))
logger.error(error_msg)
raise ValueError(error_msg)
if num_branches != len(num_channels):
error_msg = 'NUM_BRANCHES({}) <> NUM_CHANNELS({})'.format(
num_branches, len(num_channels))
logger.error(error_msg)
raise ValueError(error_msg)
if num_branches != len(num_inchannels):
error_msg = 'NUM_BRANCHES({}) <> NUM_INCHANNELS({})'.format(
num_branches, len(num_inchannels))
logger.error(error_msg)
raise ValueError(error_msg)
def _make_one_branch(self, branch_index, block, num_blocks, num_channels,
stride=1):
# 构建一个分支,一个分支重复num_blocks个block
downsample = None
# 这里判断,如果通道变大(分辨率变小),则使用下采样
if stride != 1 or
self.num_inchannels[branch_index] != num_channels[branch_index] * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.num_inchannels[branch_index],
num_channels[branch_index] * block.expansion,
kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(num_channels[branch_index] * block.expansion,
momentum=BN_MOMENTUM),
)
layers = []
layers.append(block(self.num_inchannels[branch_index],
num_channels[branch_index], stride, downsample))
self.num_inchannels[branch_index] =
num_channels[branch_index] * block.expansion
for i in range(1, num_blocks[branch_index]):
layers.append(block(self.num_inchannels[branch_index],
num_channels[branch_index]))
return nn.Sequential(*layers)
def _make_branches(self, num_branches, block, num_blocks, num_channels):
branches = []
# 通过循环构建多分支,每个分支属于不同的分辨率
for i in range(num_branches):
branches.append(
self._make_one_branch(i, block, num_blocks, num_channels))
return nn.ModuleList(branches)
def _make_fuse_layers(self):
if self.num_branches == 1:
return None
num_branches = self.num_branches # 2
num_inchannels = self.num_inchannels
fuse_layers = []
for i in range(num_branches if self.multi_scale_output else 1):
# i代表枚举所有分支
fuse_layer = []
for j in range(num_branches):
# j代表处理的当前分支
if j > i: # 进行上采样,使用最近邻插值
fuse_layer.append(nn.Sequential(
nn.Conv2d(num_inchannels[j],
num_inchannels[i],
1,
1,
0,
bias=False),
nn.BatchNorm2d(num_inchannels[i],
momentum=BN_MOMENTUM),
nn.Upsample(scale_factor=2**(j-i), mode='nearest')))
elif j == i:
# 本层不做处理
fuse_layer.append(None)
else:
conv3x3s = []
# 进行strided 3x3 conv下采样,如果跨两层,就使用两次strided 3x3 conv
for k in range(i-j):
if k == i - j - 1:
num_outchannels_conv3x3 = num_inchannels[i]
conv3x3s.append(nn.Sequential(
nn.Conv2d(num_inchannels[j],
num_outchannels_conv3x3,
3, 2, 1, bias=False),
nn.BatchNorm2d(num_outchannels_conv3x3,
momentum=BN_MOMENTUM)))
else:
num_outchannels_conv3x3 = num_inchannels[j]
conv3x3s.append(nn.Sequential(
nn.Conv2d(num_inchannels[j],
num_outchannels_conv3x3,
3, 2, 1, bias=False),
nn.BatchNorm2d(num_outchannels_conv3x3,
nn.ReLU(False)))
fuse_layer.append(nn.Sequential(*conv3x3s))
fuse_layers.append(nn.ModuleList(fuse_layer))
return nn.ModuleList(fuse_layers)
def get_num_inchannels(self):
return self.num_inchannels
def forward(self, x):
if self.num_branches == 1:
return [self.branches[0](x[0])]
for i in range(self.num_branches):
x[i]=self.branches[i](x[i])
x_fuse=[]
for i in range(len(self.fuse_layers)):
y=x[0] if i == 0 else self.fuse_layers[i][0](x[0])
for j in range(1, self.num_branches):
if i == j:
y=y + x[j]
else:
y=y + self.fuse_layers[i][j](x[j])
x_fuse.append(self.relu(y))
# 将fuse以后的多个分支结果保存到list中
return x_fuse
models.py中保存的参数, 可以通过这些配置来改变模型的容量、分支个数、特征融合方法:
# high_resoluton_net related params for classification
POSE_HIGH_RESOLUTION_NET = CN()
POSE_HIGH_RESOLUTION_NET.PRETRAINED_LAYERS = ['*']
POSE_HIGH_RESOLUTION_NET.STEM_INPLANES = 64
POSE_HIGH_RESOLUTION_NET.FINAL_CONV_KERNEL = 1
POSE_HIGH_RESOLUTION_NET.WITH_HEAD = True
POSE_HIGH_RESOLUTION_NET.STAGE2 = CN()
POSE_HIGH_RESOLUTION_NET.STAGE2.NUM_MODULES = 1
POSE_HIGH_RESOLUTION_NET.STAGE2.NUM_BRANCHES = 2
POSE_HIGH_RESOLUTION_NET.STAGE2.NUM_BLOCKS = [4, 4]
POSE_HIGH_RESOLUTION_NET.STAGE2.NUM_CHANNELS = [32, 64]
POSE_HIGH_RESOLUTION_NET.STAGE2.BLOCK = 'BASIC'
POSE_HIGH_RESOLUTION_NET.STAGE2.FUSE_METHOD = 'SUM'
POSE_HIGH_RESOLUTION_NET.STAGE3 = CN()
POSE_HIGH_RESOLUTION_NET.STAGE3.NUM_MODULES = 1
POSE_HIGH_RESOLUTION_NET.STAGE3.NUM_BRANCHES = 3
POSE_HIGH_RESOLUTION_NET.STAGE3.NUM_BLOCKS = [4, 4, 4]
POSE_HIGH_RESOLUTION_NET.STAGE3.NUM_CHANNELS = [32, 64, 128]
POSE_HIGH_RESOLUTION_NET.STAGE3.BLOCK = 'BASIC'
POSE_HIGH_RESOLUTION_NET.STAGE3.FUSE_METHOD = 'SUM'
POSE_HIGH_RESOLUTION_NET.STAGE4 = CN()
POSE_HIGH_RESOLUTION_NET.STAGE4.NUM_MODULES = 1
POSE_HIGH_RESOLUTION_NET.STAGE4.NUM_BRANCHES = 4
POSE_HIGH_RESOLUTION_NET.STAGE4.NUM_BLOCKS = [4, 4, 4, 4]
POSE_HIGH_RESOLUTION_NET.STAGE4.NUM_CHANNELS = [32, 64, 128, 256]
POSE_HIGH_RESOLUTION_NET.STAGE4.BLOCK = 'BASIC'
POSE_HIGH_RESOLUTION_NET.STAGE4.FUSE_METHOD = 'SUM'
然后来看整个HRNet模型的构建, 由于整体代码量太大,这里仅仅来看forward函数。
def forward(self, x):
# 使用两个strided 3x3conv进行快速降维
x=self.relu(self.bn1(self.conv1(x)))
x=self.relu(self.bn2(self.conv2(x)))
# 构建了一串BasicBlock构成的模块
x=self.layer1(x)
# 然后是多个stage,每个stage核心是调用HighResolutionModule模块
x_list=[]
for i in range(self.stage2_cfg['NUM_BRANCHES']):
if self.transition1[i] is not None:
x_list.append(self.transition1[i](x))
else:
x_list.append(x)
y_list=self.stage2(x_list)
x_list=[]
for i in range(self.stage3_cfg['NUM_BRANCHES']):
if self.transition2[i] is not None:
x_list.append(self.transition2[i](y_list[-1]))
else:
x_list.append(y_list[i])
y_list=self.stage3(x_list)
x_list=[]
for i in range(self.stage4_cfg['NUM_BRANCHES']):
if self.transition3[i] is not None:
x_list.append(self.transition3[i](y_list[-1]))
else:
x_list.append(y_list[i])
y_list=self.stage4(x_list)
# 添加分类头,上文中有显示,在分类问题中添加这种头
# 在其他问题中换用不同的头
y=self.incre_modules[0](y_list[0])
for i in range(len(self.downsamp_modules)):
y=self.incre_modules[i+1](y_list[i+1]) +
self.downsamp_modules[i](y)
y=self.final_layer(y)
if torch._C._get_tracing_state():
# 在不写C代码的情况下执行forward,直接用python版本
y=y.flatten(start_dim=2).mean(dim=2)
else:
y=F.avg_pool2d(y, kernel_size=y.size()
[2:]).view(y.size(0), -1)
y=self.classifier(y)
return y
5. 总结
HRNet核心方法是:在模型的整个过程中,保存高分辨率表征的同时使用让不同分辨率的feature map进行特征交互。
HRNet在非常多的CV领域有广泛的应用,比如ICCV2019的东北虎关键点识别比赛中,HRNet就起到了一定的作用。并且在分类部分的实验证明了在同等参数量的情况下,可以取代ResNet进行分类。
之前看郑安坤大佬的一篇文章CNN结构设计技巧-兼顾速度精度与工程实现中提到了一点:
senet是hrnet的一个特例,hrnet不仅有通道注意力,同时也有空间注意力
-- akkaze-郑安坤
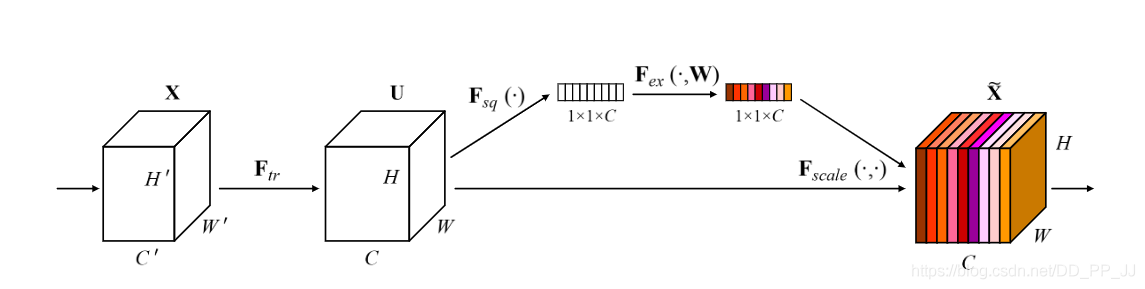
SELayer首先通过一个全局平均池化得到一个一维向量,然后通过两个全连接层,将信息进行压缩和扩展,通过sigmoid以后得到每个通道的权值,然后用这个权值与原来的feature map相乘,进行信息上的优化。
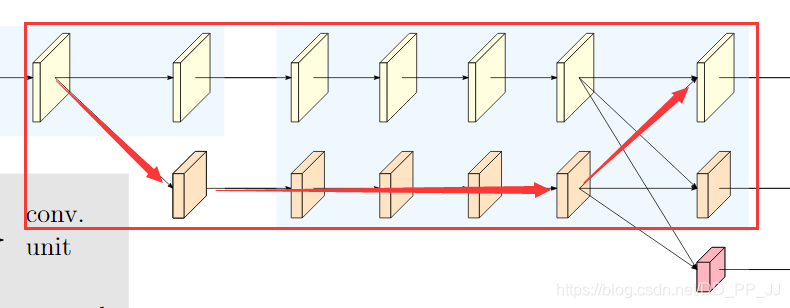
可以看到上图用红色箭头串起来的是不是和SELayer很相似。为什么说SENet是HRNet的一个特例,但从这个结构来讲,可以这么看:
- SENet没有像HRNet这样分辨率变为原来的一半,分辨率直接变为1x1,比较极端。变为1x1向量以后,SENet中使用了两个全连接网络来学习通道的特征分布;但是在HRNet中,使用了几个卷积(Residual block)来学习特征。
- SENet在主干部分(高分辨率分支)没有安排卷积进行特征的学习;HRNet中主干部分(高分辨率分支)安排了几个卷积(Residual block)来学习特征。
- 特征融合部分SENet和HRNet区分比较大,SENet使用的对应通道相乘的方法,HRNet则使用的是相加。之所以说SENet是通道注意力机制是因为通过全局平均池化后没有了空间特征,只剩通道的特征;HRNet则可以看作同时保留了空间特征和通道特征,所以说HRNet不仅有通道注意力,同时也有空间注意力。
HRNet团队有10人之多,构建了分类、分割、检测、关键点检测等库,工作量非常大,而且做了很多扎实的实验证明了这种思路的有效性。所以是否可以认为HRNet属于SENet之后又一个更优的backbone呢?还需要自己实践中使用这种想法和思路来验证。
6. 参考
https://arxiv.org/pdf/1908.07919