无锁
无锁是指线程通过无限循环来执行更新操作,如果执行成功就退出循环,如果执行失败(有其他线程更新了值),则继续执行,直到成功为止。CAS操作就属于无锁。如果从性能的角度来看,无锁状态的性能是非常高的。
自旋锁
自旋锁是一种通过让线程不释放当前的CPU执行一个忙循环,来尝试获取锁的方式。自旋锁的前提假设是锁被其它线程占用的时间很短。如果其它线程占用锁的时间很长,那么自旋的线程只会白白消耗处理器资源,而不会做任何有用的工作,反而带来性能上的浪费。自旋次数的默认值是10次,用户可以通过使用参数-XX:PreBlockSpin来更改。
HotSpot虚拟机对象头Mark Word
| 存储内容 | 标志位 | 状态 |
|---|---|---|
| 对象哈希码、对象分代年龄 | 01 |
未锁定 |
| 指向锁记录的指针 | 00 |
轻量级锁定 |
| 偏向线程ID、偏向时间戳、对象分代年龄 | 01 |
可偏向 |
| 指向重量级锁的指针 | 10 |
膨胀(重量级锁定) |
| 空,不需要记录信息 | 11 |
GC标记 |
偏向锁
当一个线程获取了锁,如果在接下来的执行过程中,该锁没有被其它的线程获取,则持有偏向锁的线程将永远不需要再进行同步。当有另外一个线程区尝试获取这个锁的时候,偏向模式就宣告结束。偏向锁的前提假设是当一个线程获取锁,后面还有大概率该线程还会需要继续持有这把锁。
虚拟机启用偏向锁的参数-XX:UseBiasedLocking。如果当前偏向锁已启动,当锁对象第一次被线程获取的时候,虚拟机将会把对象头中的标志位设为01,即偏向模式。同时使用CAS操作把获取到这个锁的线程的ID记录在对象的Mark Word之中,如果CAS操作成功,持有偏向锁的线程以后每次进入这个锁的同步块时,虚拟机都可以不用再进行同步操作了。
轻量级锁
在代码进入同步块的时候,如果此同步对象没有被锁定(锁标志位为01状态),虚拟机首先将在当前线程的栈帧中建立一个名为锁记录(Lock Record)的空间,用于存储锁对象目前的Mark Word的拷贝。
然后,虚拟机将使用CAS操作尝试将对象的Mark Word更新为指向Lock Record的指针。如果这个更新动作成功了,那么这个线程就拥有了该对象的锁,并且对象Mark Word的锁标志位(Mark Word的最后2bit)将转变为00,即表示此对象处于轻量级锁定状态。轻量级锁的前提假设是对于绝大部分的锁,在整个同步周期内都是不存在竞争的,通过CAS操作来避免时候互斥锁的开销。
重量级锁
当有两个及以上的线程争用同一个锁,那么轻量级锁就不再有效,要膨胀为重量级锁。锁标志的状态值变为10,Mark Word中存储的就是指向重量级锁(互斥量)的指针,后面等待锁的线程也要进入阻塞状态。
在讨论锁之间的转换状态时,首先需要理解以下几个问题:
- 偏向锁只有设置了
-XX:UseBiasedLocking参数才会存在 - 假设启用了偏向锁,对象头的锁标志位是
01(和未锁定状态一样),但是存储的内容是偏向线程ID、偏向时间戳 - 当线程获取偏向锁是通过CAS操作将对象头中存储的偏向线程ID更新为当前线程的ID
- 对象是否被锁定是指对象头是否指向线程的锁记录(Lock Record)
- 只有是轻量级锁或者重量级锁时对象才会被锁定
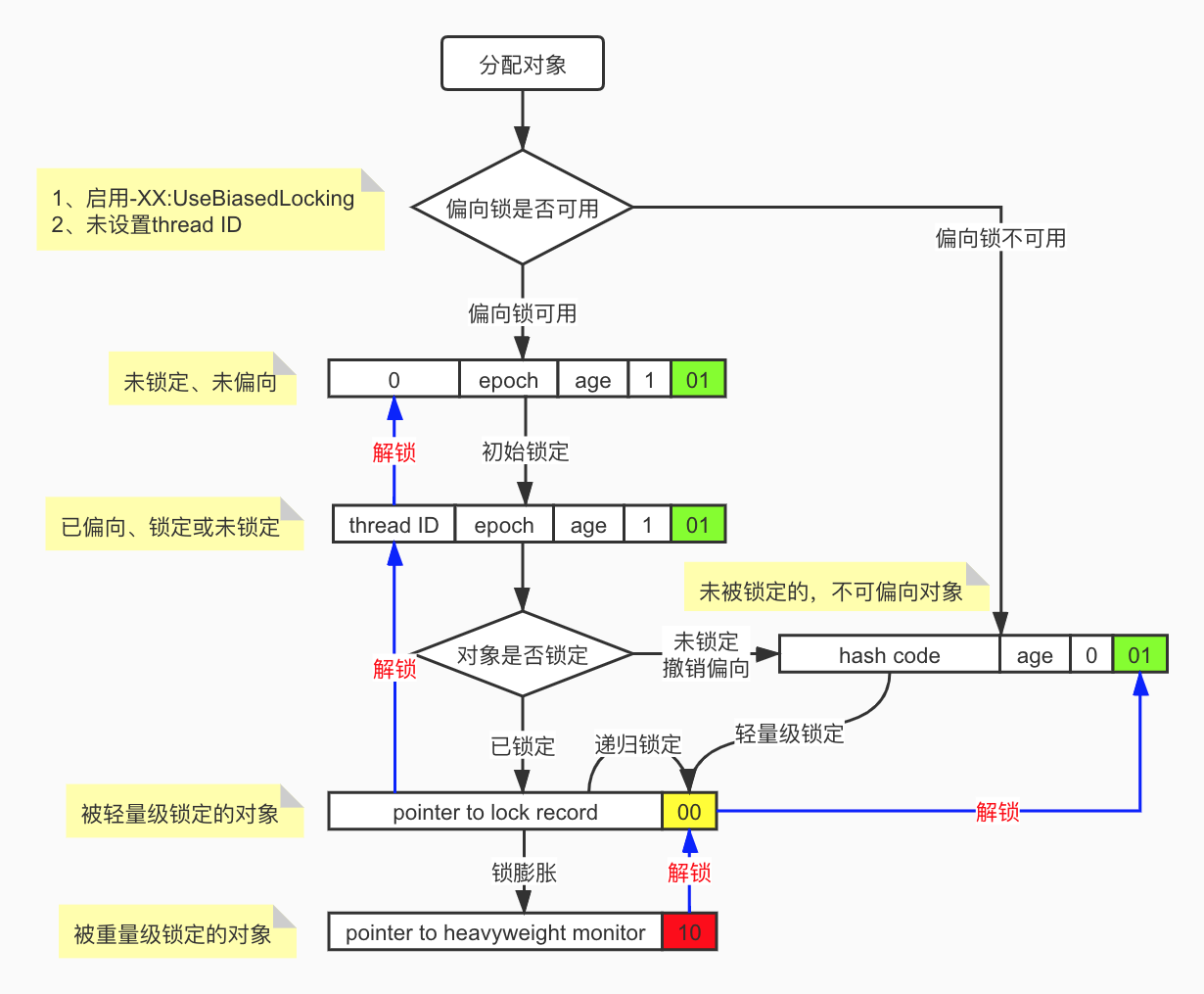
锁之间状态转换
结合自己的理解绘制了一个锁之间状态转化的关系图: