奇异值分解的理论参见下面的链接
http://www.cnblogs.com/pinard/p/6251584.html
https://blog.csdn.net/shenziheng1/article/details/52916278
https://blog.csdn.net/billbliss/article/details/78579308
https://blog.csdn.net/zhongkejingwang/article/details/43053513
https://blog.csdn.net/u010099080/article/details/68060274
在Matlab中的eig()函数,和Opencv中的eigen()函数,都是用来获得矩阵的特征值和特征矢量。并且,这两个函数的输入矩阵必须是对称矩阵。
Matlab中的eig()函数,常见的写法如下:
[V D]=eig(A);
D是矩阵A的特征值组成的对角矩阵,与A是同数据类型,同尺度。V是与特征值对应的特征矢量组成的矩阵。
在Opencv中的eigen()函数,常见的写法如下:
myEigen(A,D,V);
函数中的A是输入矩阵,D和V是输出的特征值矢量和特征矢量组成的矩阵。eig()函数与eigen()函数的不同之处是:
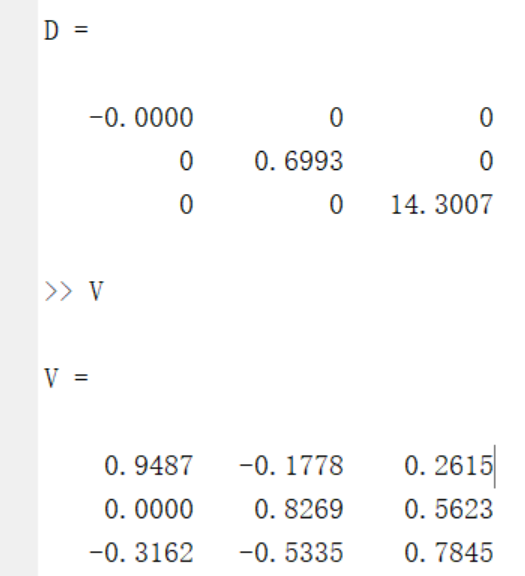
1、在eigen()中的D是一个一维特征值组成的列矢量,并且特征值是按照降序排序;而在eig()中的D则是一个以特征值为对角的对角矩阵,特征值是按照升序排序。
2、在eigen()中的V是特征矢量组成的矩阵,矩阵中的每一行就是一个特征矢量;而在eig()中的V则是以特征矢量组成的矩阵,矩阵中的每一列即是一个特征矢量。
下面是同一个实例,在Matlab中和Opencv中的比较:
首先是Matlab中的eig函数的实例代码:
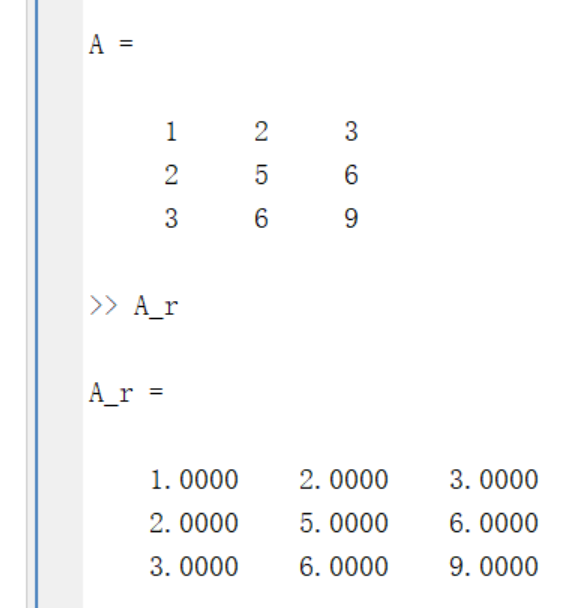
clear; clc; A=[1,2,3; 2,5,6; 3,6,9]; [V D]=eig(A); A_r=V*D*V';
输入结果如下:
下面是Opencv中eigen函数的实例代码:
//为方便与Matlab中的eig()函数比较,我把eigen封装在一个函数里,并将特征值矢量转换成对角矩阵,与Matlab中类似
void myEigen(Mat&A,Mat&D,Mat&V) { eigen(A,D,V); Mat E=Mat::eye(A.size(),A.type()); for(int i=0;i<A.rows;i++) { E.at<double>(i,i)=D.at<double>(0,i); } D=E.clone(); } const double eps=2.224e-16; int main() { Mat A=(Mat_<double>(3,3)<< 1,2,3, 2,5,6, 3,6,9); Mat D,V; myEigen(A,D,V); Mat A_r=V.t()*D*V; cout<<"原矩阵 A ="<<endl<<A<<endl; cout<<"重构矩阵A_r="<<endl<<A_r<<endl<<endl; cout<<"D="<<endl<<D<<endl; cout<<"V="<<endl<<V<<endl; return 0; }
输出结果如下:
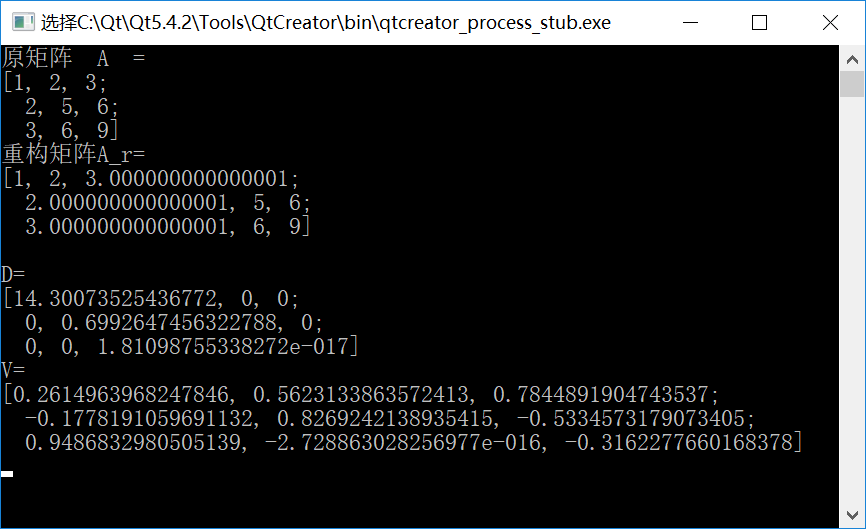
比较Matlab和Opencv中的D、V值:
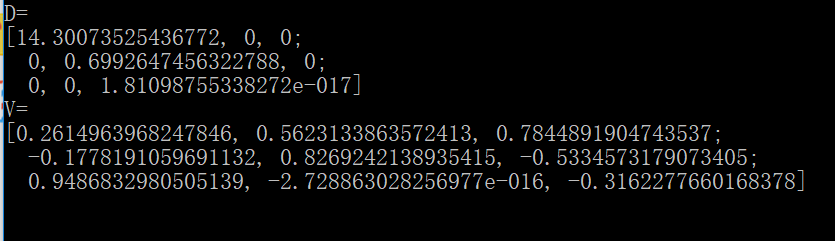
Opencv中V的第一列,与Matlab中V的第一行数值一直,但排序相反,其它行列对比也基本一致。