1. cv2.cvtcolor(img, cv2.COLOR_BGR2GRAY) # 将彩色图转换为灰度图
参数说明: img表示输入的图片, cv2.COLOR_BGR2GRAY表示颜色的变换形式
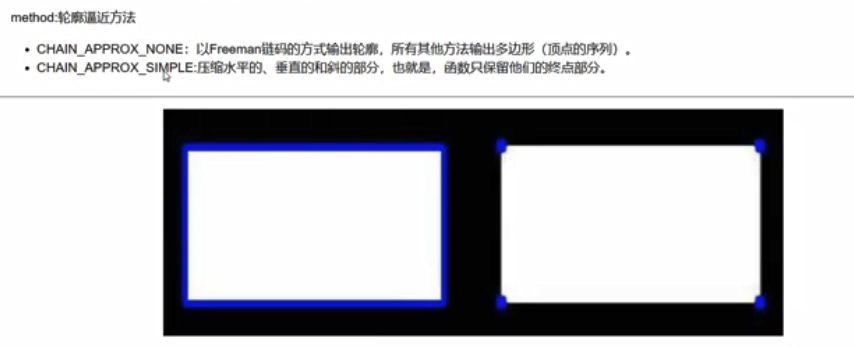
2. cv2.findContours(img,mode, method) # 找出图中的轮廓值,得到的轮廓值都是嵌套格式的
参数说明:img表示输入的图片,mode表示轮廓检索模式,通常都使用RETR_TREE找出所有的轮廓值,method表示轮廓逼近方法,使用NONE表示所有轮廓都显示
3. cv2.drawCountours(img, contours, -1, (0, 0, 255), 2) # 画出图片中的轮廓值,也可以用来画轮廓的近似值
参数说明:img表示输入的需要画的图片, contours表示轮廓值,-1表示轮廓的索引,(0, 0, 255)表示颜色, 2表示线条粗细
4. cv2.contourArea(cnt, True) # 计算轮廓的面积
参数说明:cnt为输入的单个轮廓值
5. cv2.arcLength(cnt, True) # 计算轮廓的周长
参数说明:cnt为输入的单个轮廓值
6. cv2.aprroxPolyDP(cnt, epsilon, True) # 用于获得轮廓的近似值,使用cv2.drawCountors进行画图操作
参数说明:cnt为输入的轮廓值, epsilon为阈值T,通常使用轮廓的周长作为阈值,True表示的是轮廓是闭合的
7. x, y, w, h = cv2.boudingrect(cnt) # 获得外接矩形
参数说明:x,y, w, h 分别表示外接矩形的x轴和y轴的坐标,以及矩形的宽和高, cnt表示输入的轮廓值
8 cv2.rectangle(img, (x, y), (x+w, y+h), (0, 255, 0), 2) # 根据坐标在图像上画出矩形
参数说明: img表示传入的图片, (x, y)表示左上角的位置, (x+w, y+h)表示加上右下角的位置,(0, 255, 0)表示颜色,2表示线条的粗细
9. (x, y), radius = cv2.minEnclosingCircle(cnt) # 获得外接圆的位置信息
参数说明: (x, y)表示外接圆的圆心,radius表示外接圆的半径, cnt表示输入的轮廓
10. cv2.Cricle(img, center, radius, (0, 255, 0), 2) # 根据坐标在图上画出圆
参数说明:img表示需要画的图片,center表示圆的中心点,radius表示圆的半径, (0, 255, 0)表示颜色, 2表示线条的粗细
轮廓检测:轮廓检测相较于canny边缘检测,轮廓检测的线条要更少一些,在opencv中,使用的函数是cv2.findCountor进行轮廓检测
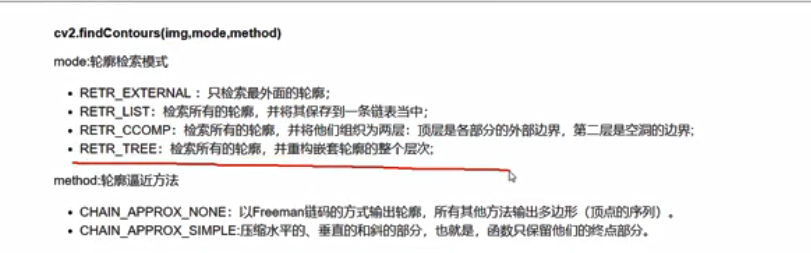
上图是轮廓检测过程中所使用的方法,一般我们使用mode RETR_TREE检测出所有的轮廓值, 对于method方法的区别在一种把边缘都检测出来,一种压缩在拐点位置
1.轮廓检测与画图:
代码:
第一步:载入图片
第二步:使用cv2.cvtcolor() 将图片转换为灰度图
第三步: 使用cv2.threshold将图片做二值化转换
第四步: 使用cv2.findContours 找出图片的轮廓值
第五步:使用cv2.drawContours在图片上画上轮廓
第六步: 使用cv2.imshow 完成画图操作
import cv2 import numpy as np def cv_show(img, name): cv2.imshow(name, img) cv2.waitKey(0) cv2.destroyAllWindows() # 第一步读入图片 img = cv2.imread('car.png') # 第二步:对图片做灰度变化 gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 第三步:对图片做二值变化 ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) # 第四步:获得图片的轮廓值 Binary, contours, h = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) # 第五步:在图片中画出图片的轮廓值 draw_img = img.copy() ret = cv2.drawContours(draw_img, contours, -1, (0, 0, 255), 2) # 第六步:画出带有轮廓的原始图片 cv_show(ret, 'ret')

2. 轮廓的周长和面积
使用cv2.findCountor获得的轮廓contours是一个嵌套的类型,即我们可以通过cnt = contours获得第一个物体的轮廓值
代码:
第一步:载入图片,做灰度值和二值化处理,并使用cv2.findCountor找出轮廓值,使用cv2.drawCountors画出第一个图像的轮廓
第二步:通过索引取出第一个轮廓值cnt,使用cv2.ContourArea()计算轮廓的面积
第三步:使用cv2.arcLength 获得轮廓的周长
# 使用另外一个图进行轮廓的测试 # 第一步:载入图片,灰度化和二值化处理,使用cv2.findContours找出轮廓, 使用cv2.drawContours进行画图操作 img = cv2.imread('contours.png') gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) binary, contours, h = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) draw_img = img.copy() # 参数说明,draw_img 需要作图的原始图像, contours表示轮廓, 0表示轮廓索引, (0, 0, 255)表示颜色, 2表示线条粗细 ret = cv2.drawContours(draw_img, contours, 0, (0, 0, 255), 2) cv_show(ret, 'ret') # 取出单个的轮廓值 cnt = contours[0] # 第二步:计算轮廓的面积 area = cv2.contourArea(cnt) # 第三步: 计算轮廓的周长 length= cv2.arcLength(cnt, True) print(area, length)
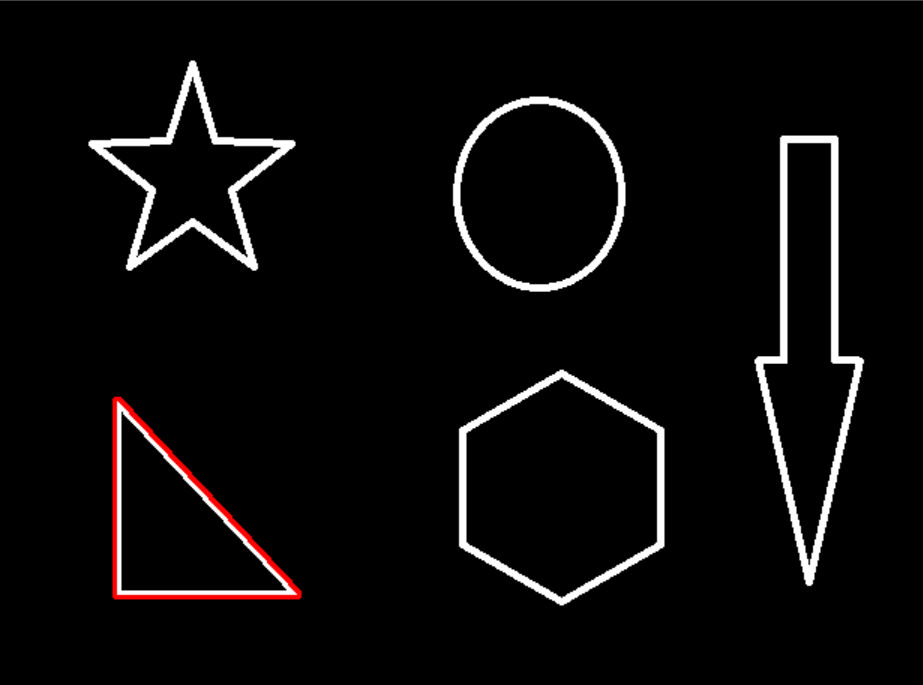
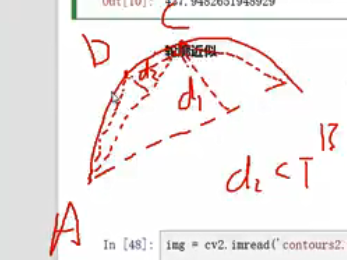
3. 轮廓近似(RDP), 假设存在一个曲线A, B,在曲线上存在一个C点,离AB线段的距离最远,记为d1, 如果d1 < T(自己设定的阈值), 将AB线段作为AB曲线的替代,否者连接AC和BC, 计算AC线段上的D点离AB距离最远,记为d2,如果d2 < T,则使用AC线段替代AC曲线,否者继续连接划分
代码:
第一步:读取图片,灰度化和二值化,使用cv2.findcontours找出轮廓
第二步:使用轮廓索引提取第一个轮廓值
第三步:使用cv2.arcLength即轮廓周长的倍数作为阈值,阈值越小,轮廓与轮廓的越近似
第四步:使用cv2.approxPolyDP(cnt, epilison)
第五步:使用cv2.drawContours进行画图操作
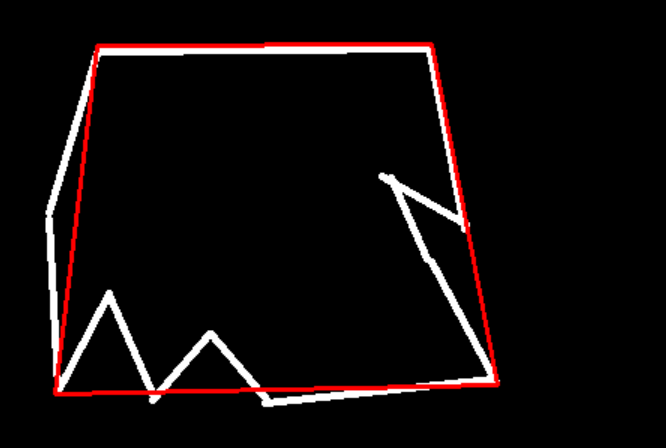
import cv2 import numpy as np def cv_show(img, name): cv2.imshow(name, img) cv2.waitKey(0) cv2.destroyAllWindows() # 第一步读入图片 img = cv2.imread('car.png') # 第二步:对图片做灰度变化 gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 第三步:对图片做二值变化 ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) # 第四步:获得图片的轮廓值 Binary, contours, h = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) # 第五步:在图片中画出图片的轮廓值 draw_img = img.copy() ret = cv2.drawContours(draw_img, contours, -1, (0, 0, 255), 2) # 第六步:画出带有轮廓的原始图片 cv_show(ret, 'ret') # 使用另外一个图进行轮廓的测试 # 第一步:载入图片,灰度化和二值化处理,使用cv2.findContours找出轮廓, 使用cv2.drawContours进行画图操作 img = cv2.imread('contours.png') gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) binary, contours, h = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) draw_img = img.copy() # 参数说明,draw_img 需要作图的原始图像, contours表示轮廓, 0表示轮廓索引, (0, 0, 255)表示颜色, 2表示线条粗细 ret = cv2.drawContours(draw_img, contours, 0, (0, 0, 255), 2) cv_show(ret, 'ret') # 取出单个的轮廓值 cnt = contours[0] # 第二步:计算轮廓的面积 area = cv2.contourArea(cnt) # 第三步: 计算轮廓的周长 length= cv2.arcLength(cnt, True) print(area, length) # 轮廓近似 img = cv2.imread('contours2.png') gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) Binary, contours, h = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) cnt = contours[0] # 使用周长的倍数作为阈值,阈值越小,图像的轮廓近似与轮廓越近似 epsilon = 0.1 * cv2.arcLength(cnt, True) approx = cv2.approxPolyDP(cnt, epsilon, True) draw_img = img.copy() ret = cv2.drawContours(draw_img, [approx], -1, (0, 0, 255), 2) cv_show(ret, 'ret')
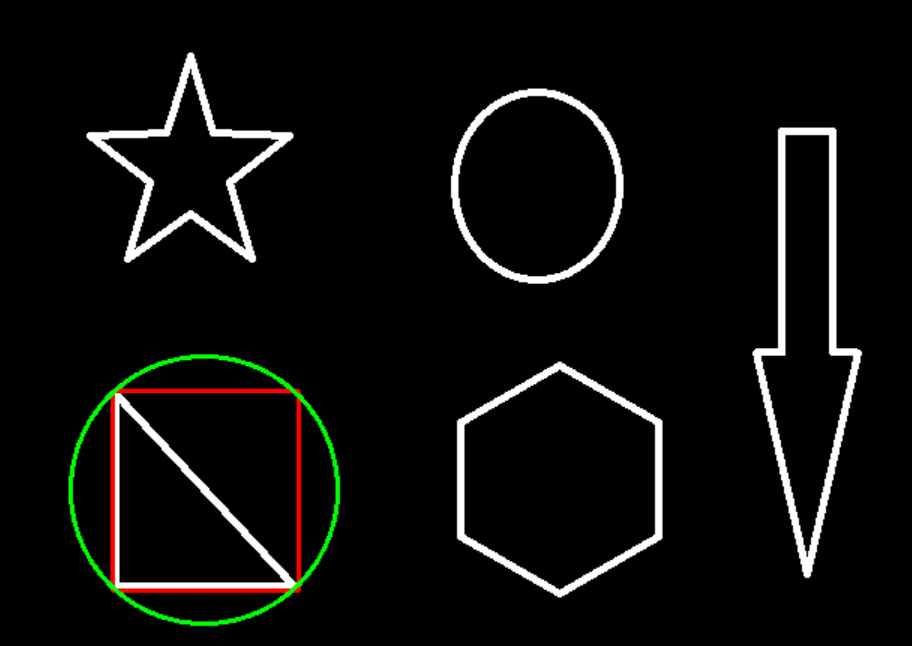
4. 外接矩形和外接圆
外接矩形: 使用cv2.boudingrect(cnt)获得轮廓的外接矩形,使用cv2.rectangle(img, (x, y), (x+w, y+h), (0, 0, 255), 2)画出矩阵的轮廓
外接圆: 使用cv2.minEnclosingCircle(cnt)获得轮廓的外接圆,使用cv2.circle(ret, centers, radius, (0, 0, 255), 2)画出圆的轮廓
代码:
第一步:载入图片,灰度化,二值化,使用cv2.findCountors找出图像的轮廓,使用轮廓索引获得第一个轮廓cnt
第二步:使用cv2.boundingrect(cnt) ,获得轮廓的x,y,w, h (x, y)表示左上角的坐标,w为宽,h为长
第三步: 使用cv2.rectangle 绘制外接的轮廓
第四步: 使用cv2.minEnclosingCircle(cnt), 获得center和radius,即圆心点的坐标和圆的半径
第五步: 使用cv2.circle(img, center, radius, (0, 0, 255), 2) 绘制圆心的外接轮廓
# 外接矩阵 img = cv2.imread('contours.png') gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) res, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY) binary, contours, h = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) cnt = contours[0] x, y, w, h = cv2.boundingRect(cnt) ret = cv2.rectangle(img, (x, y), (x+w, y+h), (0, 0, 255), 2) cv_show(ret, 'ret') print('矩形面积 / 外接矩形面积', cv2.contourArea(cnt) / (w*h)) # 外接圆

(x, y), radius = cv2.minEnclosingCircle(cnt) center = (int(x), int(y)) radius = int(radius) ret = cv2.circle(ret, center, radius, (0, 255, 0), 2) cv_show(ret, 'ret')