前言
对前面的东西更新了一下。地方包括:
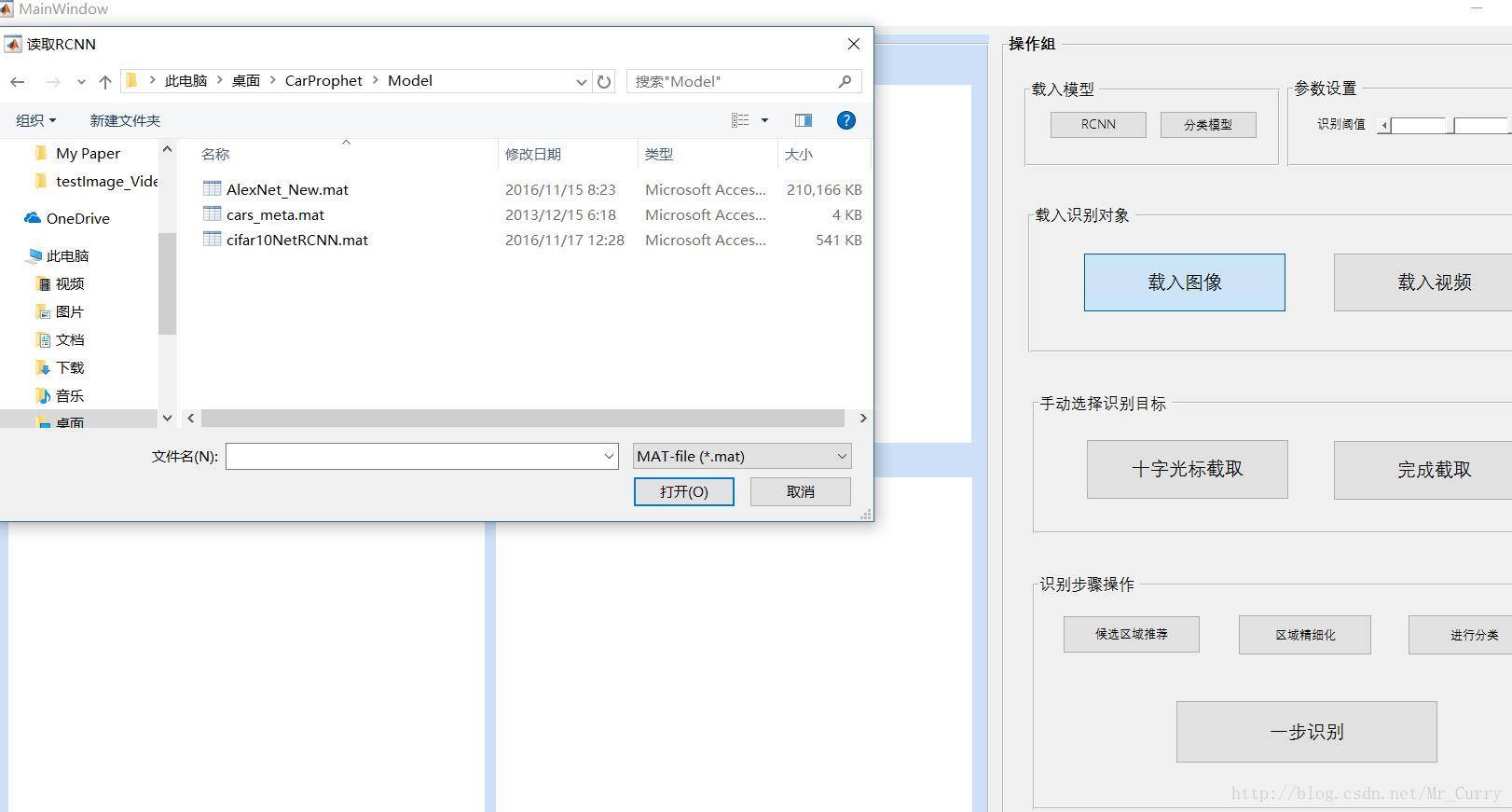
1、GUI的更新,更友好的用户界面
2、支持用手直接画车辆区域,并且识别出来
3、将proposal、detect、fine-grained classification三个步骤分离
4、在传入Classification Net的时候,不再循环传入分类,而是将检测出的proposal一起截取形成一个image4d,共同传入alexnet。此举是为了加速。
Github
https://github.com/ChenJoya/Vehicle_Detection_Recognition
效果
直接看看吧!
1、四个步骤:
载入图像:

区域推荐:(只显示了一部分)
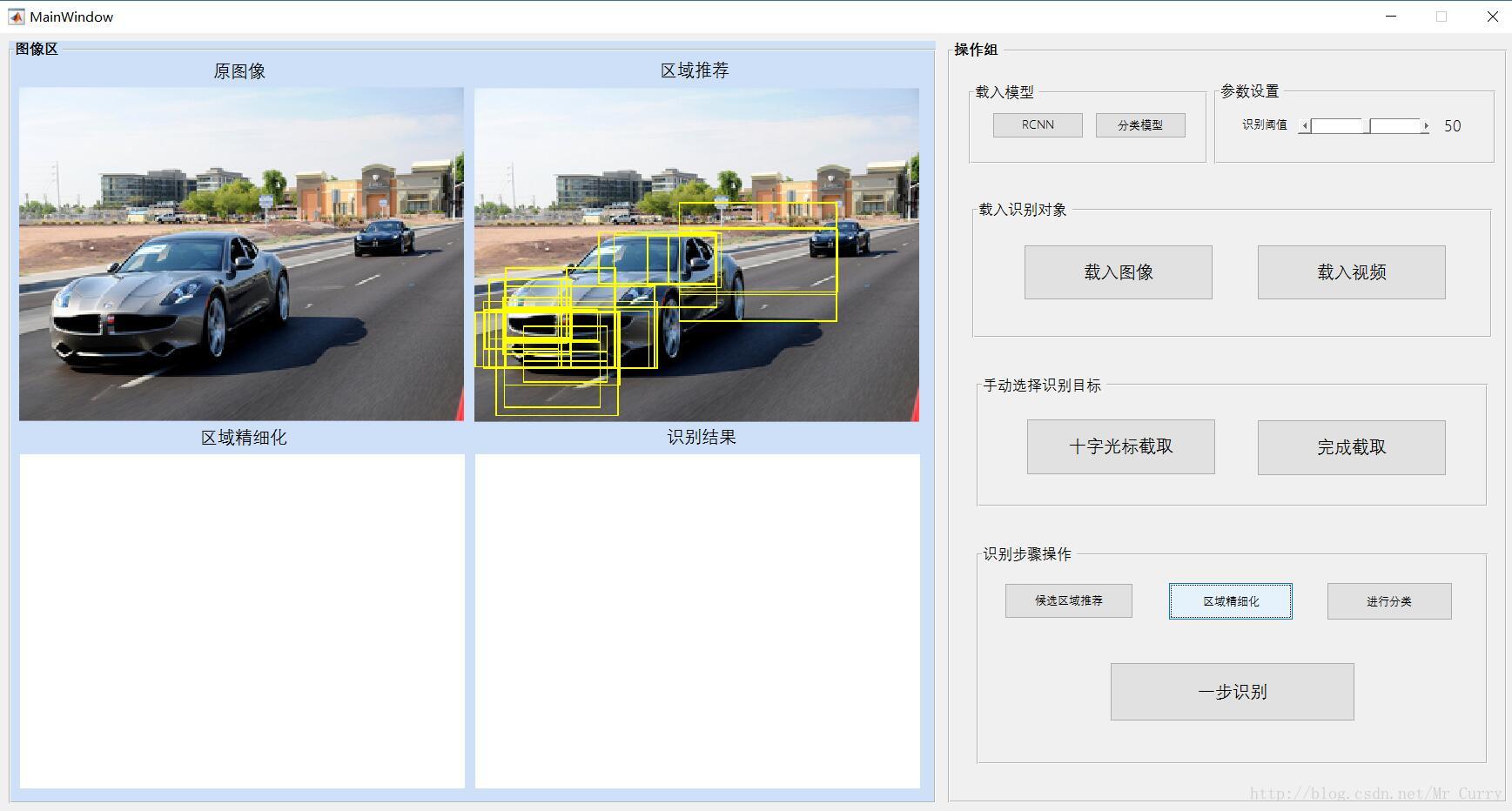
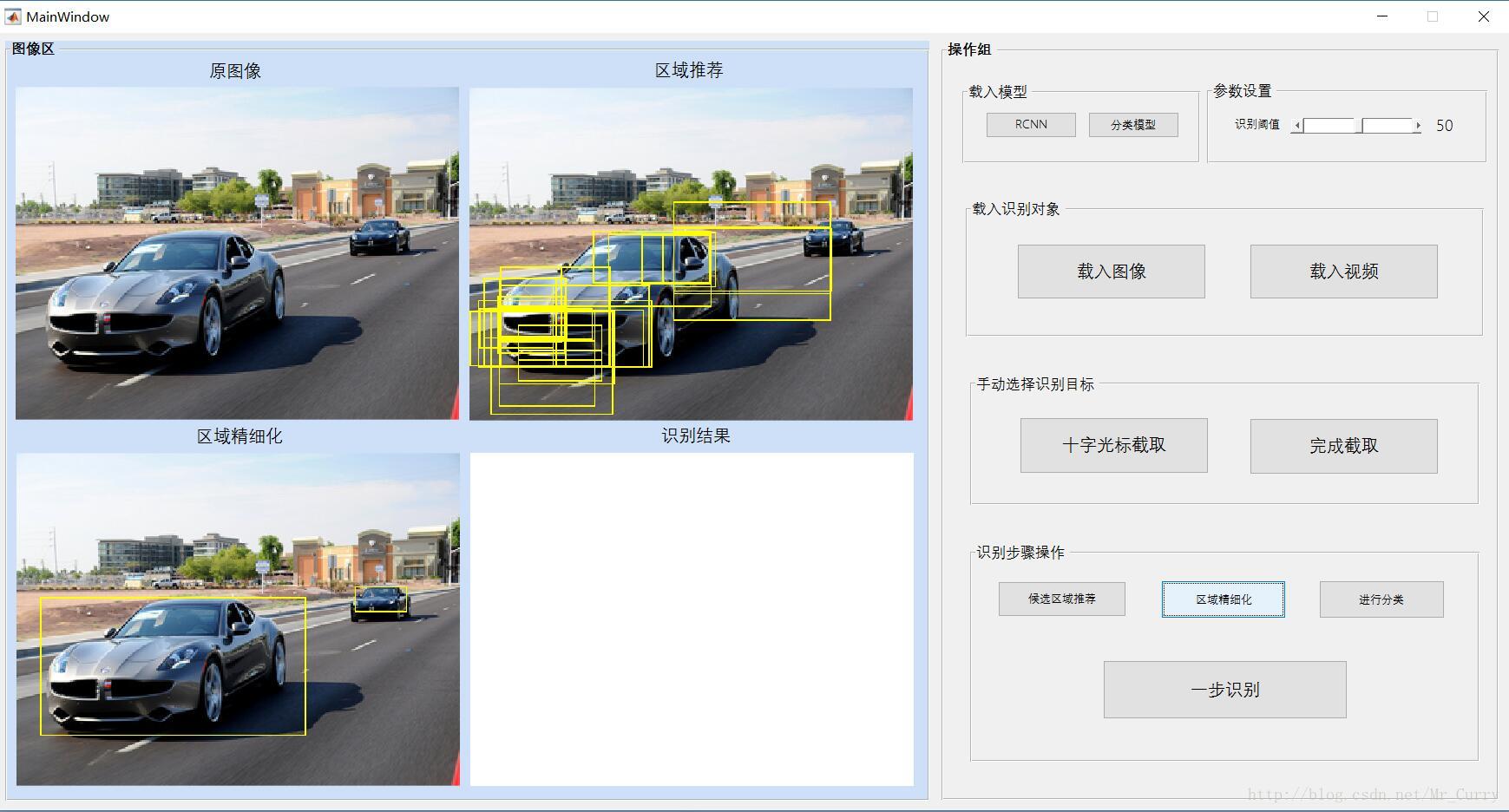
区域精细化:
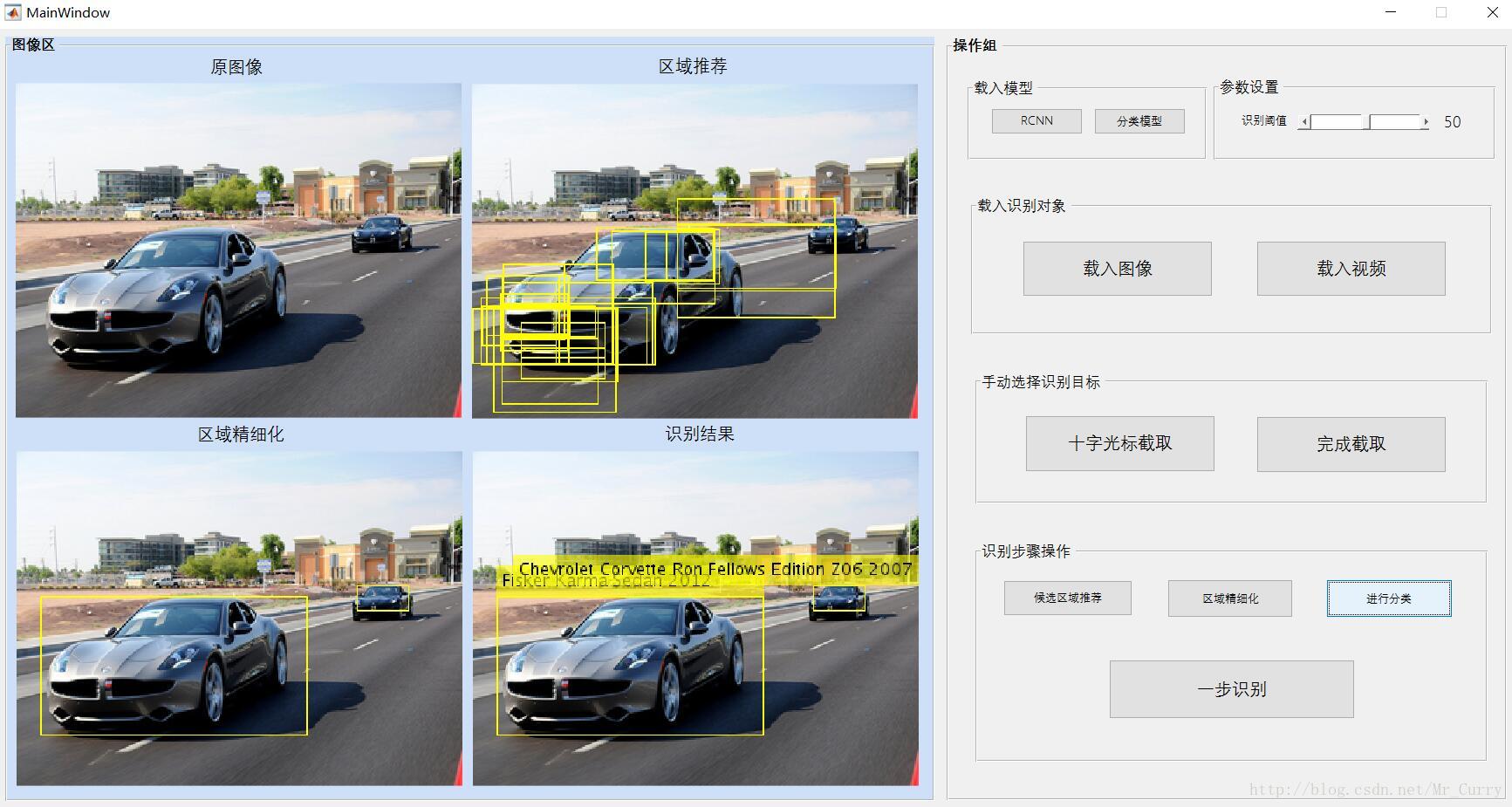
分类:
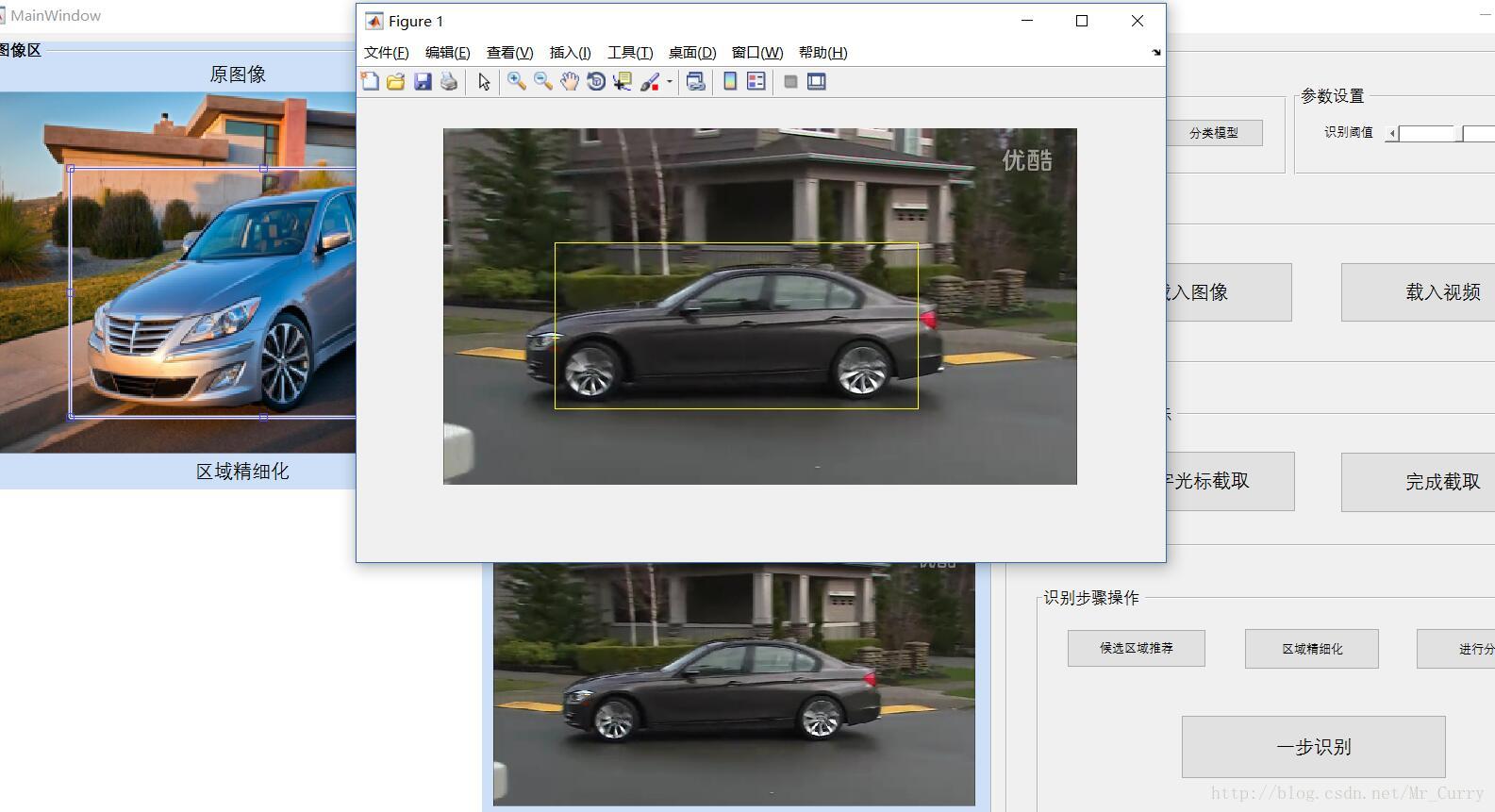
2、可以直接截取车辆区域:

3、视频中的检测与识别:
4、支持自己载入模型:
程序设计
采用CarProphet类进行接口设计,供GUI中不同的回调函数调用。
声明
global Predictor;
Predictor=CarProphet('Model/cifar10NetRCNN.mat','Model/AlexNet_New.mat','Model/cars_meta.mat');采用全局变量的形式,让GUI能够调用其中的成员变量和函数。
三个关键函数:
function [Proposal,Scores]=selective_search(Predictor)
[Proposal,Scores]=Predictor.RCNNModel.cifar10NetRCNN.RegionProposalFcn(Predictor.Mat);
end
function RealRegion=rcnn_forward(Predictor)
[bboxes, scores, ~]= Predictor.RCNNModel.cifar10NetRCNN.detect(Predictor.Mat);
CarScores=scores(:,1);
HighProbROI_Index=find(CarScores>Predictor.Threshold);
RealRegion=bboxes(HighProbROI_Index,:);
end
function [rois,classes]=classify(Predictor)
size_=size(Predictor.RealRegion);
length_=size_(1);
img_batch4d=zeros(227,227,3,length_);
for i=1:length_
crop_roi=Predictor.RealRegion(i,:);
img_single=imcrop(Predictor.Mat,crop_roi);
img_single=imresize(img_single,[227 227]);
img_batch4d(:,:,:,i)=img_single; % Constructing 4d-array images
end
if(~isempty(img_batch4d))
label_nums=Predictor.ClassifyModel.AlexNet_New.classify(img_batch4d);
%draw labels in picture
classes=Predictor.class_array.class_names(label_nums);
rois=Predictor.RealRegion;
end
end用于显示的:
core_func文件夹下:
function DrawMat=draw(DrawMat,HighScoreProposals)
%draw box
size_=size(HighScoreProposals);
length_=size_(1);
for i=1:length_
SingleBox_=HighScoreProposals(i,:);
DrawMat=insertObjectAnnotation(DrawMat, 'rectangle', SingleBox_, '','LineWidth',1);
end
end
function DrawMat=draw_roi_class(DrawMat,rois,classes)
%draw box
size_=size(rois);
length_=size_(1);
for i=1:length_
SingleBox_=rois(i,:);
DrawMat=insertObjectAnnotation(DrawMat, 'rectangle', SingleBox_, classes{i},'LineWidth',1);
end
end
function HighScoreProposals=get_highscore_proposals(Proposals,Scores)
%score 归一化
score_0_1_=mapminmax(Scores',0,1);
%选择阈值
score_more_index=find(score_0_1_>0.5);
%得到得分高的proposals
HighScoreProposals=Proposals(score_more_index,:);
end 直接在https://github.com/ChenJoya/Vehicle_Detection_Recognitionx下载吧!
注意:模型没有重新训练。有时间我再训练新的:)