霍夫圆变换的基本思路是认为图像上每一个非零像素点都有可能是一个潜在的圆上的一点,跟霍夫线变换一样,也是通过投票,生成累积坐标平面,设置一个累积权重来定位圆。
在笛卡尔坐标系中圆的方程为:

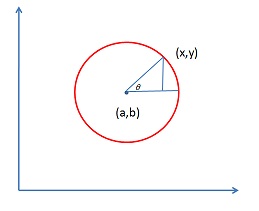
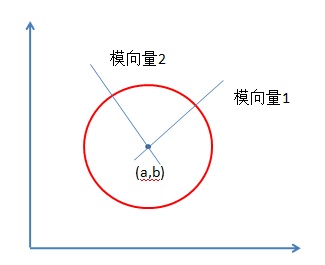
其中(a,b)是圆心,r是半径,也可以表述为:
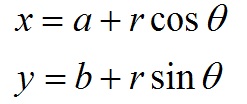
即
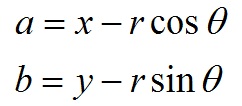
所以在abr组成的三维坐标系中,一个点可以唯一确定一个圆。
而在笛卡尔的xy坐标系中经过某一点的所有圆映射到abr坐标系中就是一条三维的曲线:
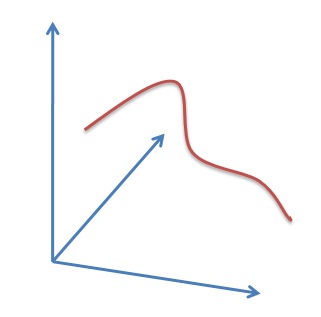
经过xy坐标系中所有的非零像素点的所有圆就构成了abr坐标系中很多条三维的曲线。
在xy坐标系中同一个圆上的所有点的圆方程是一样的,它们映射到abr坐标系中的是同一个点,所以在abr坐标系中该点就应该有圆的总像素N0个曲线相交。通过判断abr中每一点的相交(累积)数量,大于一定阈值的点就认为是圆。
以上是标准霍夫圆变换实现算法,问题是它的累加面试一个三维的空间,意味着比霍夫线变换需要更多的计算消耗。Opencv霍夫圆变换对标准霍夫圆变换做了运算上的优化。它采用的是“霍夫梯度法”。它的检测思路是去遍历累加所有非零点对应的圆心,对圆心进行考量。如何定位圆心呢?圆心一定是在圆上的每个点的模向量上,即在垂直于该点并且经过该点的切线的垂直线上,这些圆上的模向量的交点就是圆心。
霍夫梯度法就是要去查找这些圆心,根据该“圆心”上模向量相交数量的多少,根据阈值进行最终的判断。
以下是Opencv中霍夫圆变换的实现:
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
using namespace cv;
using namespace std;
int main( int argc, char* argv[] )
{
Mat image=imread(argv[1]);
Mat imageGray;
cvtColor(image,imageGray,CV_RGB2GRAY);
GaussianBlur(imageGray,imageGray,Size(3,3),1,2);
imshow("Gaussian Image",imageGray);
vector<Vec3f>circles;
HoughCircles(imageGray,circles,CV_HOUGH_GRADIENT,1,1,200,160,0);
for(int i=0;i<circles.size();i++)
{
Point circleCenter(circles[i][0],circles[i][1]);
int radius=circles[i][2];
circle(image,circleCenter,radius,Scalar(0,0,255),3); //做圆
circle(image,circleCenter,3,Scalar(255,0,0),3); //圆心
}
imshow("Circle Image",image);
waitKey();
}在当前参数下只有一个圆被检测出来,检测效果:
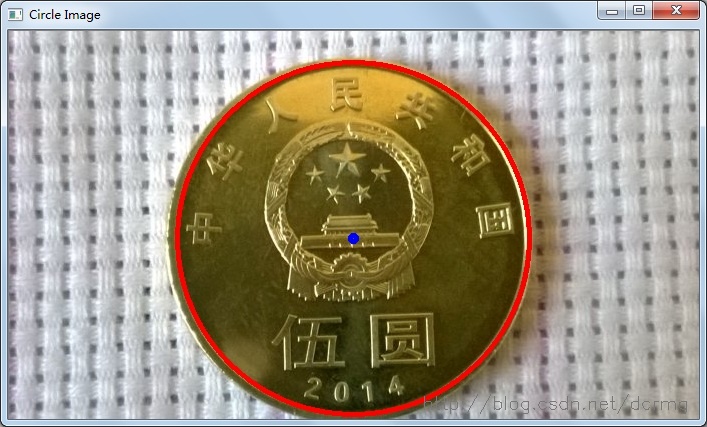
HoughCircles方法对参数比较敏感,很小的改动就可能导致差别很大的检测效果,需要针对不同图像的不同检测用途进行调试。
函数原型:
void HoughCircles( InputArray image, OutputArray circles,
int method, double dp, double minDist,
double param1=100, double param2=100,
int minRadius=0, int maxRadius=0 );第一个参数image是输入图像矩阵,要求是灰度图像;
第二个参数 circles是一个包含检测到的圆的信息的向量,向量内第一个元素是圆的横坐标,第二个是纵坐标,第三个是半径大小;
第三个参数 methodmethod是所使用的圆检测算法,目前只有CV_HOUGH_GRADIENT一个可选;
第四个参数 dp是累加面与原始图像相比的分辨率的反比参数,dp=2时累计面分辨率是元素图像的一半,宽高都缩减为原来的一半,dp=1时,两者相同。(关于这个分辨率的概念没有理解透,按道理低分辨率应该意味着更快的检测速度,然而实测恰恰相反)
第五个参数 minDist定义了两个圆心之间的最小距离;
第六个参数param1是Canny边缘检测的高阈值,低阈值被自动置为高阈值的一半;
第七个参数param2是累加平面对是否是圆的判定阈值;
第八和第九个参数定义了检测到的圆的半径的最大值和最小值;