论文名称:Visual Object Tracking using Adaptive Correlation Filters
文献地址:https://www.cs.colostate.edu/~vision/publications/bolme_cvpr10.pdf
源码地址:https://github.com/xingqing45678/Mosse_CF
由于基于CNNs深度学习在单目标跟踪方法的参数量和计算量都较大,难以与目标检测算法一起移植到嵌入式中。同时,受CVPR2020 AutoTrack的影响,开始从基于传统CF,DCF思想角度入手,对相关滤波CF的鼻祖MOSSE进行攻读。
本文主要介绍相关滤波系列算法的开篇——MOSSE基本原理及其python代码实现流程。
由于论文中涉及到大量傅里叶变换的公式,可能显得MOSSE晦涩难懂,本篇尽量淡化傅里叶变换的公式内容,突出MOSSE在跟踪过程中所做的工作。
相关滤波
相关滤波(CF)源于信号处理领域,有这么一句话"两个信号越相似,其相关值越高。在跟踪,就是找到与跟踪目标响应最大的项" 。通过后续代码的解读,会体会到相关值越高在MOSSE中的作用。
相关操作
假设有两个信号f和g,则两个信号的相关性(correlation)为:
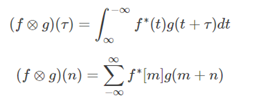
其中,f∗表示f的复共轭...(说好的淡化公式的... 看不明白不要紧,只要明白卷积就可以往下看)
对于图像而言,相关性可以理解为相关核在图像上进行点积操作,如下图所示。图像的相关公式可以表达为g = f ⓧ h,具体而言,对应元素相乘在求和:

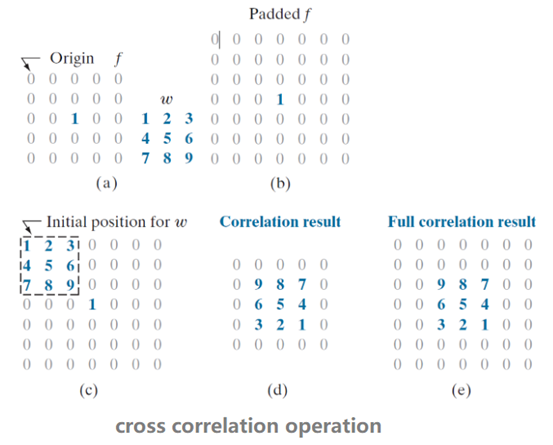
从上图的结果可以看出,输出正好是相关核旋转了180°。
具体步骤:
a. 相关核,中心分别位于输入图像的f(i, j)像素上进行滑动;(会补零)
b. 利用上式进行点积操作,并求和,得到输出图像对应的像素值g(i, j);
c. 在输出图像上进行滑动,重复b的操作,求出输出图像上的所有像素值。
你可能会觉得相关操作和卷积操作一样,但二者实际上是有区别的。
卷积操作
图像卷积操作的公式:g = f ★ h,具体而言,对应到每个像素的表达式如下所示,可以看出,卷积操作满足交换律。

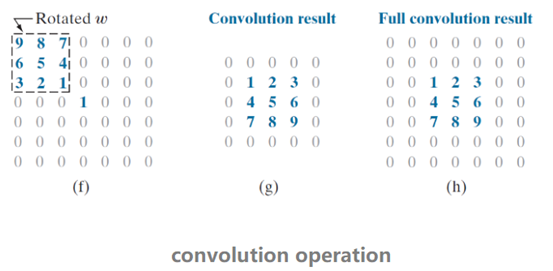
In Convolution operation, the kernel is first flipped by an angle of 180 degrees and is then applied to the image.
也就是说, 卷积操作与相关操作的差异在于卷积将核kernel旋转了180度(顺逆都一样);相关可以反应两个信号的相似度,卷积不可以;卷积满足交换律,相关不可以;卷积可以直接通过卷积定理(时域上的卷积等于频域上的乘积)来加速运算,相关不可以。
参考文章:https://towardsdatascience.com/convolution-vs-correlation-af868b6b4fb5
MOSSE
基本思想
MOSSE的基本思想:以上一帧目标位置为bbox,在当前帧图像上截取目标,使用相关核找到当前截取图像上的最大响应,这里的最大响应就是当前目标的中心,然后更新当前帧目标的中心,并通过第一帧给出的bbox的宽高为宽高,生成此时物体的框体。(这里有一个假设,就是相邻帧物体不会发生过大的位移,即使用上一帧的bbox截取当前帧的图像,仍可以获得到目标的中心) --- 可以看出,MOSSE对于物体大小的变化,以及物体的消失没有丝毫抵抗能力。
具体操作流程
通过基本思想可以看出,需要首先获得一个可以在目标中心获得最大响应的相关核h。即下述公式操作后,g中最大值是物体的中心。
![]()
由于上式在计算机中计算量较大,作者对上式采用快速傅里叶变换(FFT):
![]()
便得到论文中给出的
因此,跟踪的任务便是找到相应的H*

在实际跟踪中,需要考虑目标外观的变化等因素的影响,需要进行一个优化的求解,即输出的响应与期望的响应越接近越好:
该优化的求解可以根据偏导数进行求取,求取结果可以直接表达为:
以上的操作均是在跟踪第一帧完成的。也就是说,相关核H的确定是通过第一帧标出的目标在线得出的。而上式中的i,对应到代码中即为若干次图像的仿射变换。而对应的输出响应的期望G*是高斯核,后续会结合代码具体解读。
为了提升算法的鲁棒性,应对目标在跟踪过程中的外观变换,需要对核进行在线的更新,更新策略如下所示:
值得一提的是,F、G、H的尺寸都是一致的。并且,在工程实践中确实将H分解为A,B两部分,并进行迭代更新。
代码解读
初始化
初始化应用于第一帧的功能实现,包括初始bbox信息的获取(中心点、宽、高、特征),以及核的生成。其中,包含图像的预处理和准备工作:
- 灰度化(输入特征为灰度,特征表达能力有限)
- 归一化
- 余弦窗的生成
- 期望输出响应G的生成(高斯核,同时让图片的左边缘与右边缘连接,上边缘与下边缘连接)
之后,便是最终要的核的生成。代码如下:
1 def init(self,first_frame,bbox): 2 if len(first_frame.shape)!=2: 3 assert first_frame.shape[2] == 3 4 first_frame=cv2.cvtColor(first_frame, cv2.COLOR_BGR2GRAY) 5 first_frame=first_frame.astype(np.float32)/255 # 归一化 6 x,y,w,h=tuple(bbox) # x,y为bbox的左下角点,和宽高 7 self._center=(x+w/2, y+h/2) # 中心点坐标 8 self.w,self.h=w,h 9 w,h=int(round(w)), int(round(h)) # 取整 10 self.cos_window=cos_window((w,h)) # 生成宽高的一维hanning窗 后再进行矩阵乘法 形成h*w的hanning矩阵 11 self._fi=cv2.getRectSubPix(first_frame,(w,h), self._center) # 根据宽高和中心点的位置截取图像/特征 12 self._G=np.fft.fft2(gaussian2d_labels((w,h), self.sigma)) # 高斯相应图 13 self.crop_size=(w,h) # 裁剪尺寸 14 self._Ai=np.zeros_like(self._G) 15 self._Bi=np.zeros_like(self._G) 16 for _ in range(8): 17 fi=self._rand_warp(self._fi) # 对裁剪的图像进行8次仿射变化(旋转),从而求得H* 18 Fi=np.fft.fft2(self._preprocessing(fi,self.cos_window)) # 进行余弦窗处理 19 self._Ai += self._G*np.conj(Fi) # conj共轭负数 20 self._Bi += Fi*np.conj(Fi) # 求解H*所需
其中,代码第4-5行:图像转化为灰度图;
代码第6-9行:获取第一帧图像的信息,将左下角点,宽高信息转化为中心点坐标。(bbox是 通过cv2.selectROI()获得到目标的左下角点坐标和宽高信息。)
代码第10行:获取余弦窗;
代码第11行:通过中心点坐标和宽高在第一帧图像上截取目标图像;
代码第12行:获得高斯响应作为期望输出G。
代码第16-20行:通过8次仿射变换,获取相关核H。
余弦窗的生成
余弦窗通过汉宁窗生成。
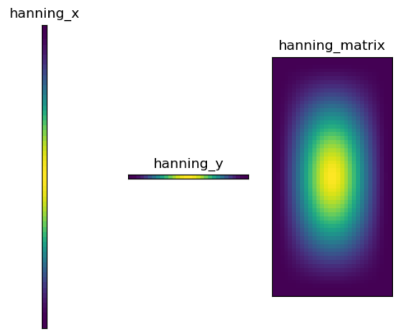
1 def cos_window(sz): 2 cos_window = np.hanning(int(sz[1]))[:, np.newaxis].dot(np.hanning(int(sz[0]))[np.newaxis, :]) 3 return cos_window
汉宁窗的模样
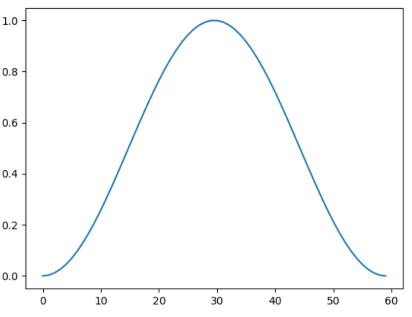
通过下图余弦矩阵的颜色分布可以看出,余弦窗具有两边小中间大的特性,并且四周的值趋近于零,有利于突出靠近中心的目标。
期望响应输出G的生成
G相当于是真值,但此处不需要人为的标注。而是通过高斯函数生成即可。高斯函数产生的最大值在图像的中心。生成后,需要进行傅里叶变换转化到频域。
1 def gaussian2d_labels(sz,sigma): 2 w, h=sz 3 xs, ys = np.meshgrid(np.arange(w), np.arange(h)) # 生成两个矩阵 一个矩阵各行是0-w-1 一个矩阵各列是0-h-1 4 center_x, center_y = w / 2, h / 2 5 dist = ((xs - center_x) ** 2 + (ys - center_y) ** 2) / (sigma**2) 6 labels = np.exp(-0.5*dist) 7 return labels
为什么可以用高斯函数产生的值来作为期望的响应输出呢?这是由于高斯函数自带中间大两边小的特性,十分符合物体中心是最大值的要求。并且在第一帧框定目标时,也会标出十分贴合的bbox,bbox的中心可以近似为物体的中心。
随机仿射变换
通过随机数的生成控制仿射变换的力度。
1 def _rand_warp(self,img): # 输入是裁剪下的图形 2 h, w = img.shape[:2] 3 C = .1 4 ang = np.random.uniform(-C, C) 5 c, s = np.cos(ang), np.sin(ang) 6 W = np.array([[c + np.random.uniform(-C, C), -s + np.random.uniform(-C, C), 0], 7 [s + np.random.uniform(-C, C), c + np.random.uniform(-C, C), 0]]) 8 center_warp = np.array([[w / 2], [h / 2]]) 9 tmp = np.sum(W[:, :2], axis=1).reshape((2, 1)) 10 W[:, 2:] = center_warp - center_warp * tmp # 仿射矩阵 11 warped = cv2.warpAffine(img, W, (w, h), cv2.BORDER_REFLECT) # 进行仿射变换 W是仿射矩阵 12 return warped
在线更新
在线更新核心操作在于相关核的更新(下述代码第6行)以及影响相关核的两个因素的更新(下述代码22-23行)。
从代码14-18行以及返回值可以看出,在线更新的过程只有中心点位置的更新,宽高不更新,如果物体的大小发生明显的变化,很难自适应。
1 def update(self,current_frame,vis=False): 2 if len(current_frame.shape)!=2: 3 assert current_frame.shape[2]==3 4 current_frame=cv2.cvtColor(current_frame,cv2.COLOR_BGR2GRAY) 5 current_frame=current_frame.astype(np.float32)/255 6 Hi=self._Ai/self._Bi # Ht kernel 7 fi=cv2.getRectSubPix(current_frame,(int(round(self.w)),int(round(self.h))),self._center) # 裁剪 8 fi=self._preprocessing(fi,self.cos_window) 9 Gi=Hi*np.fft.fft2(fi) # fft 10 gi=np.real(np.fft.ifft2(Gi)) # 返回负数类型参数的实部, 以及二维傅里叶反变换 11 if vis is True: 12 self.score=gi 13 curr=np.unravel_index(np.argmax(gi, axis=None),gi.shape) # 找到最大那个相应的位置 14 dy,dx=curr[0]-(self.h/2),curr[1]-(self.w/2) # 中心点位置移动量 15 x_c,y_c=self._center 16 x_c+=dx 17 y_c+=dy # 中心点更新 18 self._center=(x_c,y_c) 19 fi=cv2.getRectSubPix(current_frame,(int(round(self.w)),int(round(self.h))),self._center) 20 fi=self._preprocessing(fi,self.cos_window) 21 Fi=np.fft.fft2(fi) 22 self._Ai=self.interp_factor*(self._G*np.conj(Fi))+(1-self.interp_factor)*self._Ai 23 self._Bi=self.interp_factor*(Fi*np.conj(Fi))+(1-self.interp_factor)*self._Bi 24 return [self._center[0]-self.w/2,self._center[1]-self.h/2,self.w,self.h]
缺点
- 输入的特征为单通道灰度图像,特征表达能力有限
- 没有尺度更新,对于尺度变化的跟踪目标不敏感