最短路径
APIs
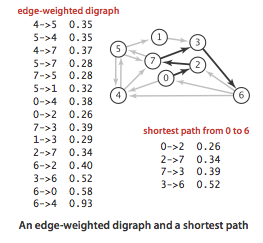
带权有向图中的最短路径,这节讨论从源点(s)到图中其它点的最短路径(single source)。
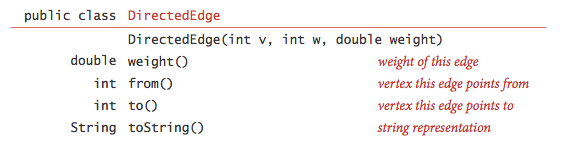
Weighted Directed Edge API
需要新的数据类型来表示带权有向边。
Weighted Directed Edge:implementation
public class DirectedEdge {
private final int v, w;
private final double weight;
public DirectedEdge(int v, int w, double weight) {
this.v = v;
this.w = w;
this.weight = weight;
}
public int from() {
return v;
}
public int to() {
return w;
}
publiv int weight() {
return weight;
}
}
习惯上处理边 e 的时候先获取端点:int v = e.from(), w = e.to();
Edge-weighted Digraph API
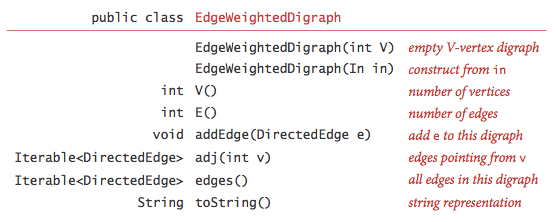
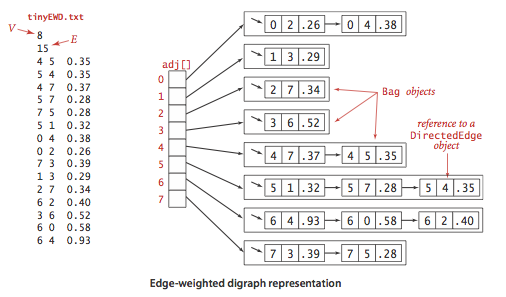
依然是使用邻接表表示,保存的是指向边对象的引用。
Edge-weighted Digraph:implementation
public class EdgeWeightedDigraph {
private final int V;
private final Bag<DirectedEdge>[] adj;
public EdgeWeightedDigraph(int V) {
this.V = V;
adj = (Bag<DirectedEdge>[]) new Bag[V];
for (int v = 0; v < V; v++)
adj[v] = new Bag<DirectedEdge>();
}
public void addEdge(DirectedEdge e) {
int v = e.from();
adj[v].add(e);
}
public Iterable<DirectedEdge> adj(int V) {
return adj[v];
}
}
Single-source Shortest Paths API
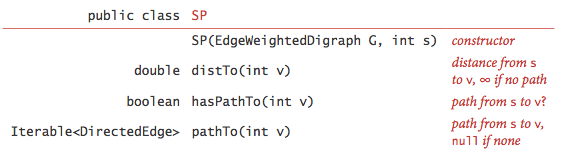
测试用例
SP sp = new SP(G, s);
for (int v = 0; v <G.V(); v++) {
StdOut.printf("%d to %d (%.2f): ", s, v, sp.distTo(v));
for (DirectedEdge e : sp.pathTo(v))
StdOut.print(e + " ");
StdOut.println();
}
运行示例
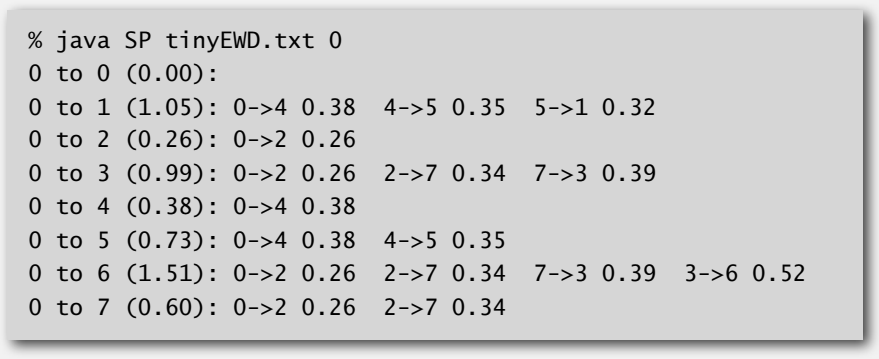
注:上述内容,详细的可以参考 booksite-4.4。
Shortest-paths Properties
Data Stuctures
这里讨论单点最短路径,我们用两个以点为索引的数组来表示最短路径树(SPT)。
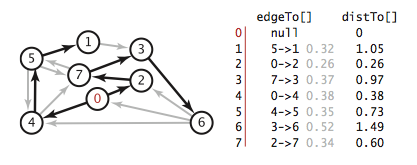
edgeTo[i] 表示从点 0 到点 i 的最短路径上的最后一条边,用来还原最短路径,edgeTo[0] 记为 null。distTo[i] 即表示从点 0 到点 i 的最短路径长度,distTo[0] 为 0。
public double distTo(int v) {
return distTo[v];
}
public Iterable<DirectedEdge> pathTo(int V) {
Stack<DirectedEdge> path = new Stack<DirectedEdge>();
for (DirectedEdge e = edgeTo[v]; e != null; e = edgeTo[e.from])
path.push(e);
return path;
}
Relaxation
我们的最短路径 API 的实现都基于一个被称为松弛(relaxation)的简单操作。想象把一根橡皮筋沿最短路径拉长,找到更短的路径,也就“松弛”了这根橡皮筋。
Edge
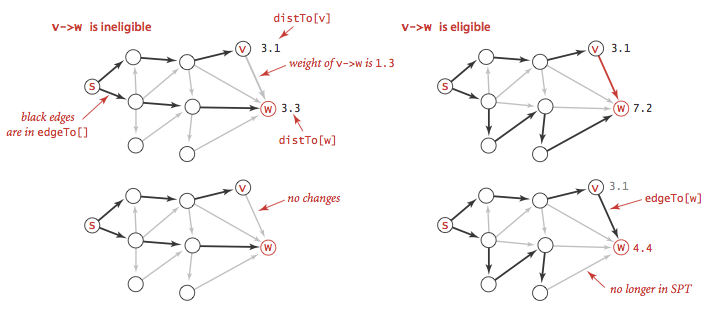
放松边 v->w 就是要检查源点 s 到点 w 经过这条边是否会更短。
private void relax(DirectedEdge e) {
int v = e.from(), w = e.to();
if (distTo[w] > distTo[v] + e.weight()) {
distTo[w] = distTo[v] + e.weight();
edgeTo[w] = e;
}
}
下图中,左边例子称为边失效,右边则说放松是成功的。
Vertex
点的松弛即放松由其发出的所有边。
private void relax(EdgeWeightedDigraph G, int v) {
for (DirectedEdge e : G.adj(v)) {
int w = e.to();
if (distTo[w] > distTo[v] + e.weight()) {
distTo[w] = distTo[v] + e.weight();
edgeTo[w] = e;
}
}
}
Shortest-paths Optimality Conditions
最优性条件:当且仅当对于任意从点 v 到点 w 的边 e,满足 distTo[w](leqslant)distTo[v]+e.weight()(没有可以放松的有效边),那么 distTo[w] 是从 s 到 w 的最短路径长度。
证明
-
必要性
假设 distTo[w] 是 s 到 w 的最短路径。若存在边 e(v->w) 有 distTo[v]+e.weight()<distTo[w],显然从 s 到 v 再经 e 到 w 更短,矛盾。
-
充分性
假设 s=(v_{0})->(v_{1})->(v_{2})->...->(v_{k})=w 是 s 到 w 的最短路径,其权重记为 (OPT_{sw}),(e_{i}) 表示路径上的第 i 条边,有:
distTo[(v_{1})] (leqslant) distTo[(v_{0})] + (e_{1}).weight()
distTo[(v_{2})] (leqslant) distTo[(v_{1})] + (e_{2}).weight()
...
distTo[(v_{k})] (leqslant) distTo[(v_{k-1})] + (e_{k}).weight()
综合这些不等式并去掉 distTo[(v_{0})] = distTo[s] = 0:
distTo[w] = distTo[(v_{k})] (leqslant) (e_{1}).weight() + (e_{2}).weight() + ... + (e_{k}).weight() = (OPT_{sw})
又因为 distTo[w] 是从 s 到 w 的某条路径的长度,不会比最短路径更短,所以下列式子成立。
(OPT_{sw} leqslant) distTo[w] (leqslant OPT_{sw})
Generic Shortest-paths Algorithm
由上述最优性条件马上可以得到一个计算单点最短路径问题的 SPT 的通用算法:
- 将 distTo[s] 初始化为 0,其它 distTo[] 元素初始化为无穷大。
- 重复放松图 G 中的任意边,直到不存在有效边为止(满足最优性条件)。
Pf
- 算法会把 distTo[v] 赋值成某条从 s 到 v 的路径长,且 edgeTo[v] 是该路径的最后一条边。
- 对于 s 可到达的点 v,distTo[v]初始为无穷大,肯定存在有效边。
- 每次成功的放松都会减少某些 distTo[v],distTo[v] 减少的次数是有限的。
注:暂时不考虑负权重。
通用算法没有指定边放松的顺序,它为我们提供了证明算法可以计算 SPT 的方式:证明算法会放松所有边直到没有有效边。
Dijkstra's Algorithm
Dijkstra 算法采用和 Prim 算法构建 MST 类似的策略来构建 SPT:每次添加的都是离起点最近的非树顶点。

从起点 s(0) 开始,维护两个数组 distTo 和 edgeTo 来表示 SPT,先把 distTo[0] 置为 0.0,其它 distTo 元素置为无穷大,edgeTo[0] 置为 null。
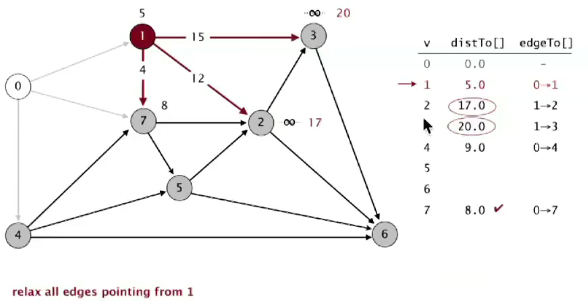
最初 distTo 数组中最小的非树点(离 SPT 最近的非树顶点)即是 distTo[0],把点 0 加入 SPT 并进行放松操作。其它 distTo 被初始化为无穷大,点 0 发出的都是有效边,更新对应的 distTo 和 edgeTo 元素。
现在 distTo 数组中最小的是非树顶点是 distTo[1](显然还需要索引优先队列来帮我们快速获取离 SPT 最近的非树顶点),加入 SPT 并放松点 1。distTo[2] 和 distTo[3] 初始更新,边 1-7 无效。
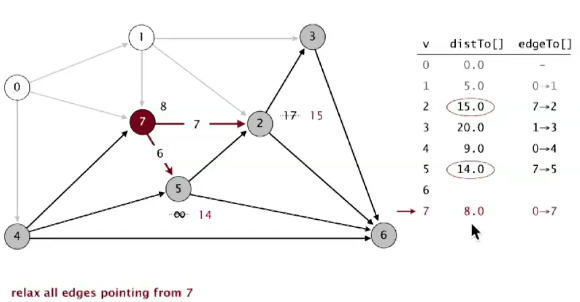
现在点 7 是离 SPT 最近的非树点,加入 SPT 并放松,边 2-7 有效,更新 distTo[2],edgeTo[2] 变为 7->2。
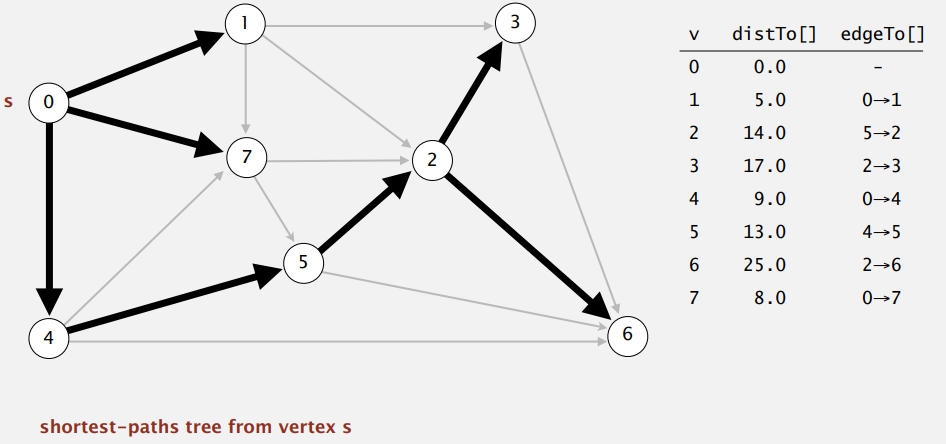
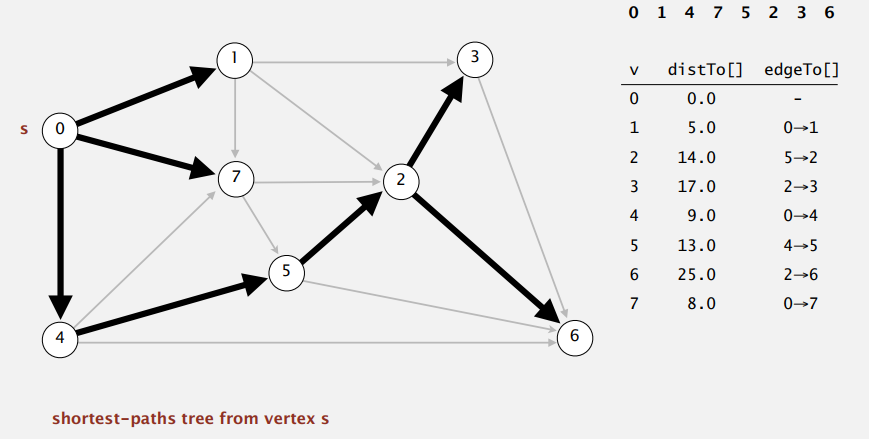
每次挑离 SPT 最近的非树点加入 SPT 并进行放松操作,直到可到达的点都被加入 SPT,也就完成了计算。
s 可到达的点都只会被放松一次,当 v 被放松时,有 distTo[w](leqslant)distTo[v]+e.weight(),而且该不等式在算法结束前都会成立,因为:
- distTo[w] 不会增加。因为放松操作只有可能减少 distTo[w]。
- distTo[v] 不会改变。边的权重非负,我们每次选择的又都是最小的 distTo[] 值,后面的放松操作不可能使任何 distTo[] 的值小于 distTo[v]。
满足最优性条件,所以 Dijkstra 算法可以解决边权重非负的加权有向图的单点最短路径问题。
Dijkstra: Java Implementation
public class DijkstraSP {
private DirectedEdge[] edgeTo;
private double[] distTo;
private IndexMinPQ<Double> pq;
public DijkstraSP(EdgeWeightedDigraph G, int s) {
edgeTo = new DirectedEdge[G.V()];
distTo = new double[G.V()];
pq = new IndexMinPQ<Double>(G.V());
for (int v = 0; v < G.V(); v++)
distTo[v] = Double.POSITIVE_INFINITY;
distTo[s] = 0.0;
pq.insert(s, 0.0);
while (!pq.isEmpty()) {
int v = pq.delMin();
for (DirectedEdge e : G.adj(v))
relax(e);
}
}
private void relax(DirectedEdge e) {
int v = e.from(), w = e.to();
if (distTo[w] > distTo[v] + e.weight()) {
distTo[w] = distTo[v] + e.weight();
edgeTo[w] = e;
if (pq.contains(w)) {
pq.decreaseKey(w, distTo[w]);
} else {
pq.insert(w, distTo[w]);
}
}
}
}
时间复杂度取决于优先队列的实现,二叉堆的话是 (ElogV) 级别。
Edge-weighted DAGs
对于带权无环有向图(DAG)我们有比 Dijkstra 更简单的算法:按图的拓扑排序来放松点,它能在线性时间内计算 SPT,能处理负权重,还可以用来找出最长路径。
直接按拓扑排序放松点,最终的 SPT 和 Dijkstra 算法跑的一样,还不需要优先队列,时间复杂度是 (E+V) 级别。
证明其正确性也和 Dijkstra 类似,它也会满足最优性条件:
-
每条边 e(v->w) 只会被放松一次(放松点 v 时),然后有不等式:distTo[w](leqslant)distTo[v]+e.weight()。
-
不等式在算法结束前都会成立,因为:
- distTo[w] 不会增加,因为放松只可能减少 distTo[] 的值。
- distTo[v] 不会改变,因为按拓扑顺序放松,指向点 v 的边不会在点 v 被放松之后放松。
-
因此,算法结束时满足最短路径的最优性条件,可以正确计算 SPT。
public class AcyclicSP {
private DirectedEdge[] edgeTo;
private double[] distTo;
public AcylicSP(EdgeWeightedDigraph G, int s) {
edgeTo = new DirectedEdge[G.V()];
distTo = new double[G.V()];
for (int v = 0; v < G.V(); v++)
distTo[v] = Double.POSITIVE_INFINITY;
distTo[s] = 0.0;
Topological topological = new Topological(G);
for (int v : topo;ogical.order())
for (DirectedEdge e : G.adj(v))
relax(e);
}
}
这种处理无环有向图最短路径问题的算法,可以被用于调整图片大小,且图片不会失真。
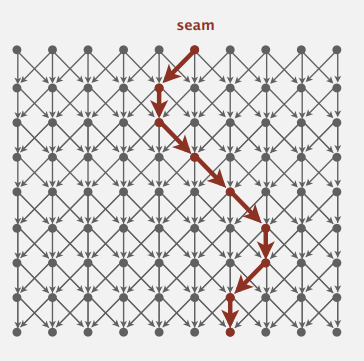
把图片的像素点当做图的点,每个点和下层的三个临近点相连,能量函数根据像素点周围的八个点计算其权重,调整大小时就把最短路径(路径上点权重总和最小)上的像素点去掉。
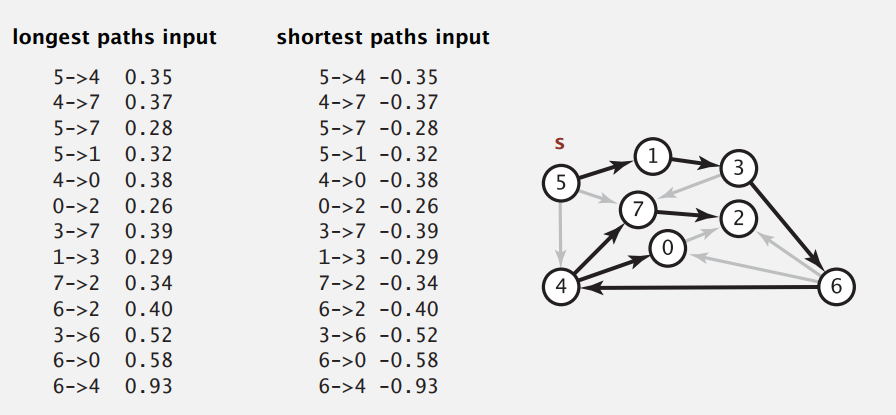
Longest Paths
拓扑排序算法可以处理负权重边(Dijkstra 要非负才能满足最优性条件),那么我们把边权重取负后再跑,得到的就是最长路径。
最长路径可以应用于平行任务调度问题。
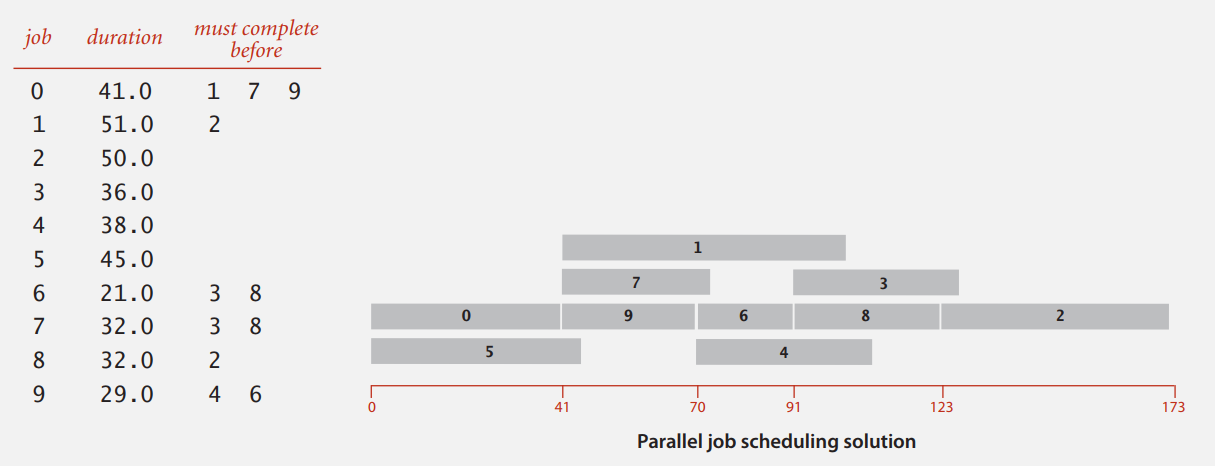
这个并行任务调度有优先级的限制,比如任务 0 必须在任务 1 之前完成,实际应用中很常见,像你要装好车门才能喷漆。
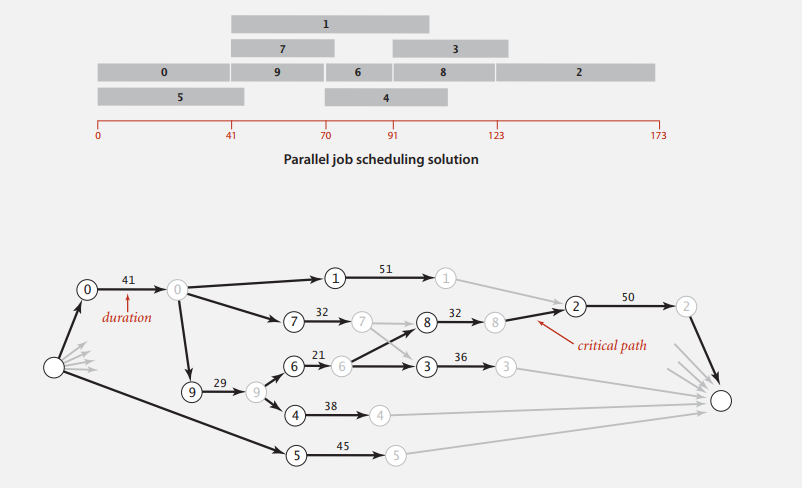
将任务调度抽象成带权无环有向图,每个任务预计开始时间即为从起点到它的起始顶点的最长距离,而图的最长路径 0->9->6->8->2 即并行任务调度问题的关键路径(完成所有任务的最早可能时间)。
Negative Weights
Dijkstra 算法不能处理负权重边,它会直接选择当前最短的边,而不会绕远路去走负权重的边。所以下图到点 3 的最短距离直接会是边 0->3 的权重 2,而不是实际上的 0->1->2->3 的总权重 1。
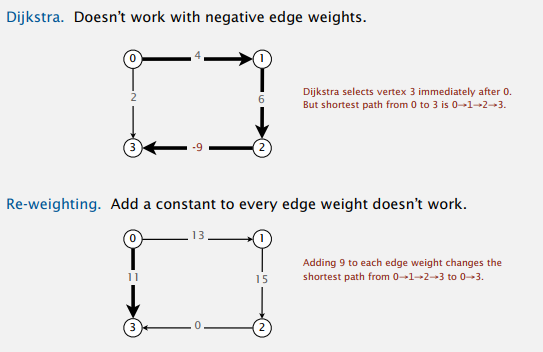
一个可能的尝试是把边权重都加上同一常数,让权重非负,但这样还是会改变最短路径,像上图那样。
介绍能处理负权重边的算法之前,要有个概念:当且仅当图不存在负权重环(环的总权重小于 0)时,SPT 存在。
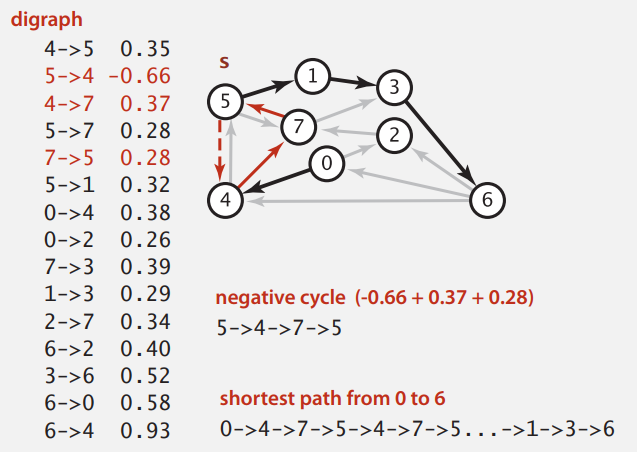
存在负权重环,最短路径可能一直减少下去。
Bellman-Ford
算法步骤:
- 将 distTo[s] 初始化为 0,其它 distTo[] 元素初始化为无穷大。
- 重复 V 次:
- 放松每条边。
for (int i = 0; i < G.V(); i++)
for (int v = 0; v < G.V(); v++)
for (DirectedEdge e : G.adj(v))
relax(e);
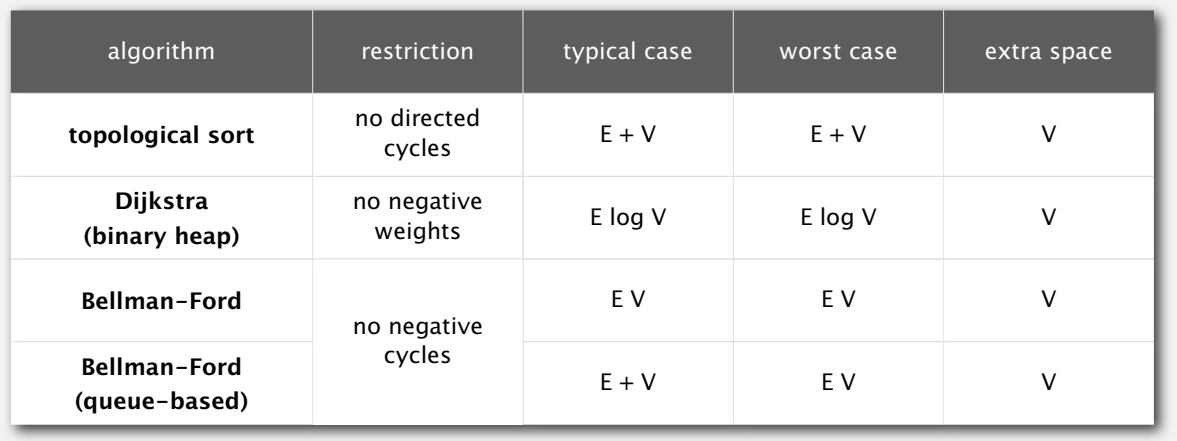
Bellman-Ford 算法能够计算任意不含负权重环的带权有向图的 SPT,所需时间正比于 (E imes V)。
证明:
在没有负权重环的带权有向图中,对于源点 s 可到达的点 t,会存在最短路径,不妨记为:s=(v_{0})->(v_{1})->...->(v_{k})=t,显然 k (leqslant)V-1。证明算法正确性的等价命题:算法在第 i 轮之后能得到 s 到 (v_{i}) 的最短路径 (v_{0})->(v_{1})->...->(v_{i})。
-
对于 i=0,显然成立。
-
假设算法在第 i 轮之后能得到 s 到 (v_{i}) 的最短路径,即为 distTo[(v_{i}])。
-
第 i+1 轮放松后,distTo[(v_{i+1})]=distTo[(v_{i})]+((v_{i})->(v_{i+1})).weight(),因为:
- 每轮放松所有点,(v_{i}) 被放松后,distTo[(v_{i+1})] 不会大于等式右边。
- 右边即最短路径 (v_{0})->(v_{1})->...->(v_{i+1}) 长度,也不会比它还小。
所以在第 i+1 轮放松后,算法能够得到从 s 到 (v_{i+1}) 的最短路径。
改进:
如果 distTo[v] 在第 i 轮放松中没有改变,那么在第 i+1 轮中也就没有必要放松点 v。于是我们可以维护一个队列,保存 distTo[] 发生改变的那些点,下一轮只放松它们就好。为了防止重复放入,再来个布尔数组表示点是否已经在队列中。所以 Bellman-Ford 算法最坏情况下需要正比于 (E imes V) 的时间,但实际使用时一般会快很多。
Cost Summary
Find A Negative Cycle
如果存在负权重环的话,基于队列实现的 Bellman-Ford 算法会陷入死循环,因为第 i 轮放松后找到的最短路径最多只有 i 条边,所以有必要实现检测负权重环的方法。

如果图有负权重环,那么 edgeTo[] 还原出来的 SPT 就会有环,于是每一轮放松之后,就检测一下 SPT 是否有环。
private void findNegativeCycle() {
int V = edgeTo.length;
EdgeWeightedDigraph spt = new EdgeWeightedDigraph(V);
for (int v = 0; v < V; v++)
if (edgeTo[v] != null)
spt.addEdge(edgeTo[v]);
EdgeWeightedDirectedCycle cf = new EdgeWeightedDirectedCycle(spt);
cycle = cf.cycle();
}
public boolean hasNegativeCycle() {
return cycle != null;
}
public Iterable<Edge> negativeCycle() {
return cycle;
}
实现用到了之前课程里检测环的类,详细的参见:BellmanFordSP.java,或是 booksite-4.4,不提。
Application
负权重环检测可以被应用于套汇。
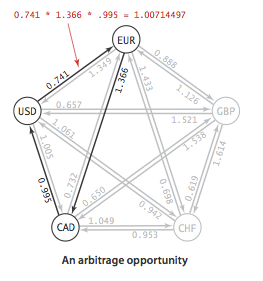
1000 美元可以换 741 欧元,后者再换成 1012.206 = 741 ( imes) 1.366 加元,加元再换回美元变成 1012.206 ( imes) 0.995 = 1007.14497,也就赚了 7.14497 美元。
在这样的图里寻找权重乘积((w_{1}w_{2}...w_{k}))大于 1 的路径,等价于 -ln((w_{1}))-ln((w_{2}))-...-ln((w_{k})) 小于零,于是我们把权重取对数再取反,找到的负权重环即目标路径。