首先需要得硬件都准备好:树莓派,sd卡,显示器和网线(最好有方便装桌面)
1.先下载镜像文件
先从ubunut官网下载镜像文件,我这里下载得Ubuntu18.04.5 64bit
https://ubuntu.com/download/raspberry-pi/thank-you?version=18.04.5&architecture=arm64+raspi4
然后解压一下
2.系统烧录
在windows下载Win32 Disk Imager
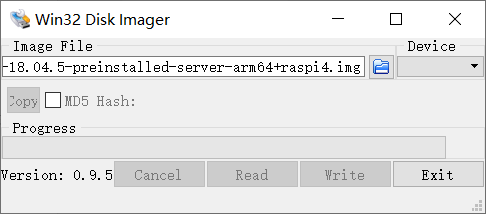
选择镜像文件和sd卡开始写入
3.sd卡插入树莓派上电开机
开机会进入tty 然后输入密码ubuntu系统会让修改密码 最后长点 不然会让重新设置新密码
设置完成后就可以登陆这时还没有桌面 需要下载
不推荐安装Gnome桌面环境的ubuntu
Xubuntu采用Xfce桌面环境,xfce属于比较轻量级的桌面环境,比标准版资源占用率低一些。具备基本完整可用的桌面环境
这个更适合树莓派
sudo apt install xubuntu-desktop
4.配置语言
开机之后将地区改为上海,语言也改下
5。改源
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial-updates main restricted universe multiverse deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial-updates main restricted universe multiverse deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial-security main restricted universe multiverse deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial-security main restricted universe multiverse deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial-backports main restricted universe multiverse deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial-backports main restricted universe multiverse deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial main universe restricted deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial main universe restricted
之前试过别的源 更新时都会出错,只有这个可以
然后进入软件和更新将这两个地方全打勾,否则后续安装ros会出错
例如
下列软件包有未满足的依赖关系: ros-kinetic-desktop-full : 依赖: ros-kinetic-desktop 但是它将不会被安装 依赖: ros-kinetic-perception 但是它将不会被安装 依赖: ros-kinetic-simulators 但是它将不会被安装 E: 无法修正错误,因为您要求某些软件包保持现状,就是它们破坏了软件包间的依赖关
6.然后就可以下载了
rosdep init ERROR: cannot download default sources list from:解决方法http://wiki.ros.org/melodic/Installation/Ubuntu
rosdep init ERROR: cannot download default sources list from 解决方法:
sudo vim /etc/apt/source.list
在打开的文件末尾一行添加: 151.101.84.133 raw.githubusercontent.com