runxinzhi.com
首页
百度搜索
深度相机
深度相机哪家强?https://blog.csdn.net/electech6/article/details/78907463
深度相机哪家强?https://zhuanlan.zhihu.com/p/28274727
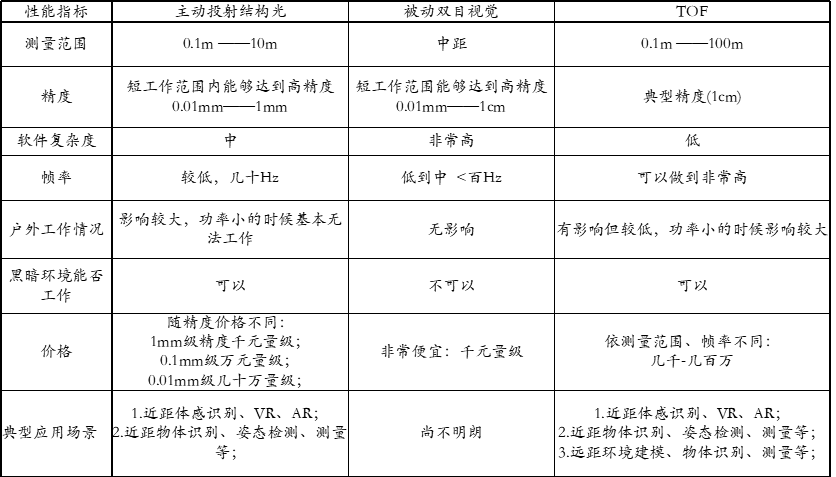
【相机】3D相机原理—结构光、双目视觉和光飞行时间法 https://zhuanlan.zhihu.com/p/48129306
深度/RGB-D相机简介
转载请注明出处 http://www.cnblogs.com/mashuai-191/
相关阅读:
oracle 与mysql 的当前时间比较
easyui 时间定格为 时分
date类型数据插入
mac 获取idea&&datagrip激活码
静态代码块
nginx mac 下启动 停止 重启,查看安装位置
定时任务的时间规则
雅酷帮微信公众平台操作手册
微信公众平台中通过网页增加好友
微信公众平台消息接口开发之微信浏览器HTTP_USER_AGENT判断
原文地址:https://www.cnblogs.com/mashuai-191/p/14584561.html
最新文章
ASP.NET Web API实现微信公众平台开发(二)access_token与定时任务
ASP.NET Web API实现微信公众平台开发(一)服务器验证
LeetCode手记-Add Binary
Windows10开发手记-Windows App Certification Kit使用教程
.NET手记-友盟消息推送服务器端加密算法的实现
Windows10开发手记-RelativePanel使用详解
.NET手记-HttpClient解析GB2312乱码问题
iOS开发笔记-Xcode添加pch文件
惊闻!SOIC 和 SOP 竟然是有区别的
正则笔记:括号后面的问号
热门文章
KiCad EDA 过孔是否可以开窗?
FastAdmin CMS 内容管理插件标签文档
通过 FastAdmin 理解开源软件
odoo 内置协议说明列表
KiCad EDA 镜像目录说明
使用 VSCODE 在 Windows 10 WSL 中远程开发
使用 git 来管理 PCB 版本
笔记:在 Windows 10 WSL Ubuntu 18.04 安装 Odoo12 (2019-06-09)
es5.0 安装head插件
git 提交代码出现git Permission to Xx denied to Xx 错误
Copyright © 2020-2023
润新知