lidar、深度相机与imu相对位姿标定
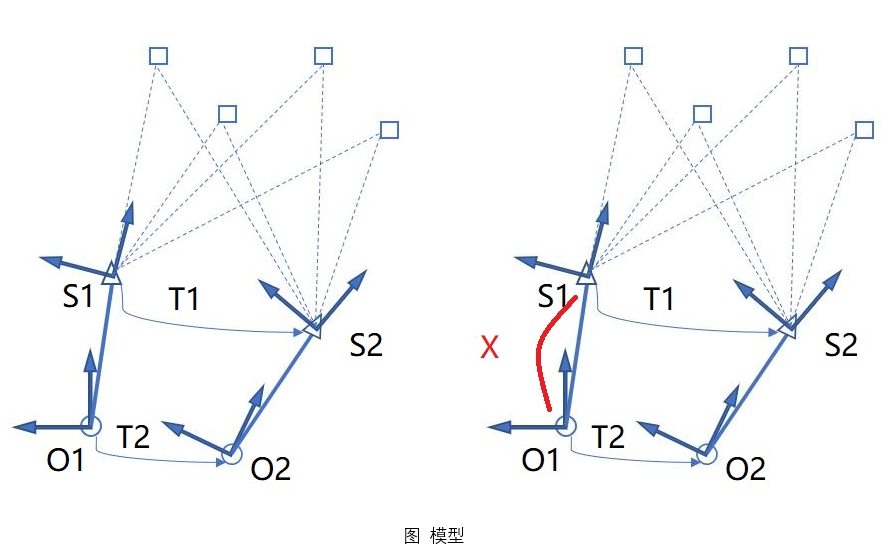
如图所示, O1、O2为IMU的传感器或者旋转平台定义的坐标系统,O1经过T2 变换到O2;S1、S2为深度相机或激光lidar的坐标系,S1经过T1 变换到S2;其中T1为寻找两次观测同名点解算得到,T2为IMU的传感器,或者编码器测量得到。
原理
首先根据几何关系很容易得到一下四个公式:

将(3)(4)代入(2)中,再将(1)代入得到: ![]() 所以重点是如何求解方程(5)中的X,这个问题可看成是求解最小二乘问题:
所以重点是如何求解方程(5)中的X,这个问题可看成是求解最小二乘问题:
![]()
求解求使误差平方和达到极小的X。当然这个最小二乘问题也是比较容易求解的,我们可以做如下转化:
![]()
所以AY=0就属于齐次坐标的最小二乘问题,对A做SVD分解,就可以的得到Y。
代码(略)