-
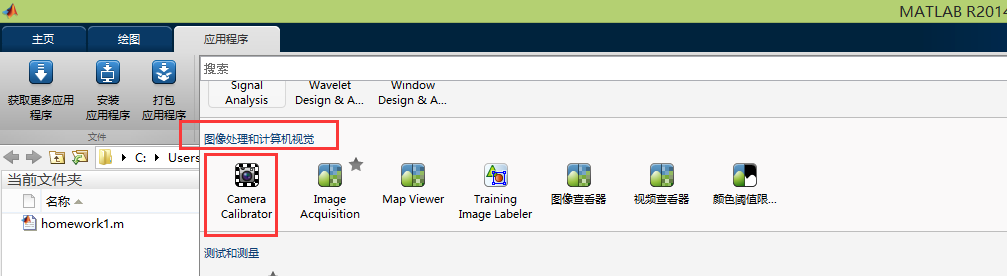
应用程序下找到Camera Calibration工具箱
-
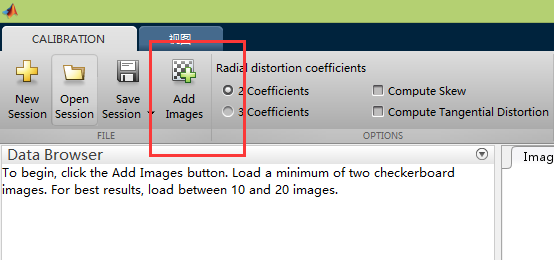
加载待标定的图像
-
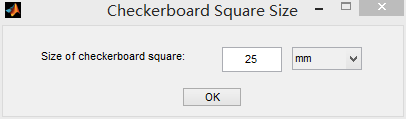
填写棋盘格每个格子边长的真实值
-
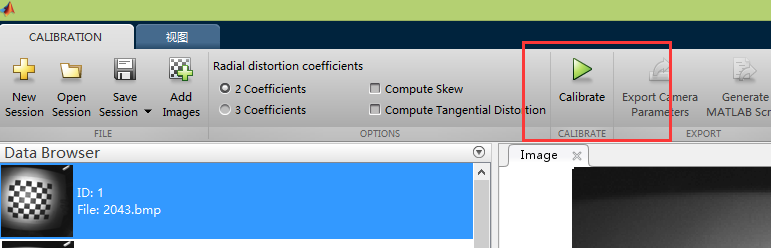
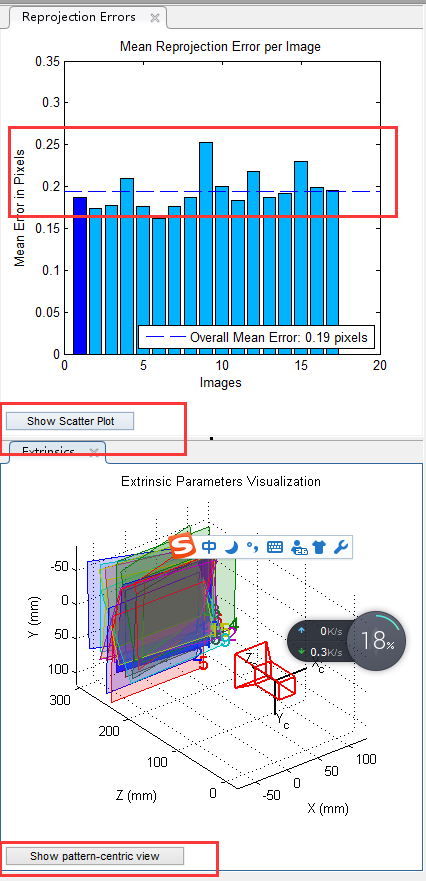
可以预览成功检测出棋盘格的图像,然后开始标定,点击Calibrate
-
平均误差小于0.5即可
-
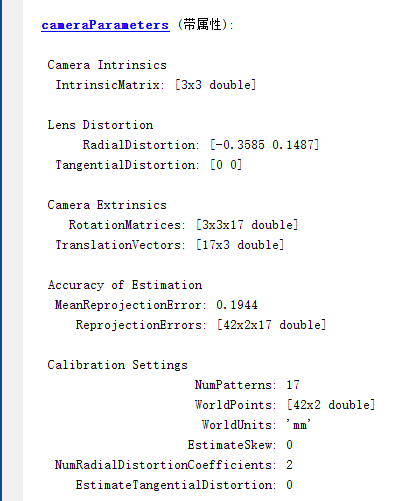
导出相机标定参数
-
在matlab工作空间里可以看到相机参数的属性
-
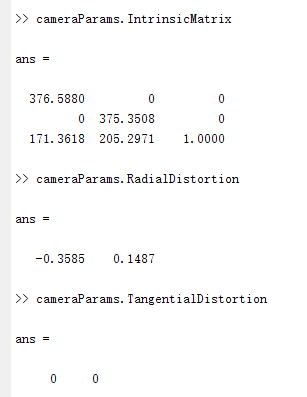
查看相机的内参矩阵,径向畸变和切向畸变。
应用程序下找到Camera Calibration工具箱
加载待标定的图像
填写棋盘格每个格子边长的真实值
可以预览成功检测出棋盘格的图像,然后开始标定,点击Calibrate
平均误差小于0.5即可
导出相机标定参数
在matlab工作空间里可以看到相机参数的属性
查看相机的内参矩阵,径向畸变和切向畸变。