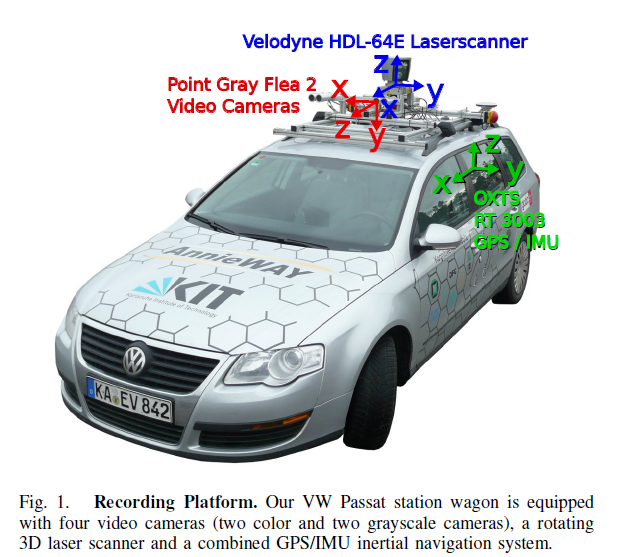
数据采集传感器:
- 彩色和灰度立体相机(x = right, y = down, z = forward);
- 激光雷达(x = forward, y = left, z = up);
- 惯性导航系统(GPS/IMU)x = forward, y = left, z = up。
1、图片
保存为png格式,将天空和汽车引擎裁剪了;并且对图片进行了矫正,矫正后图片依赖提供的校准(calibration)文件
2、激光雷达
保存为二进制浮点数,点云每个点包含(x,y,z)坐标和反射值(r);每一帧大约包含120000个3D坐标和反射值
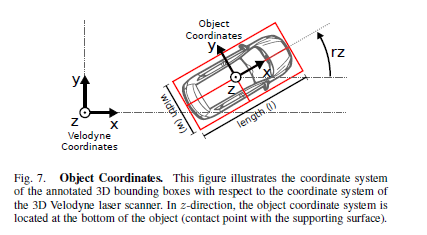
标注
- 提供3D box标注(在激光雷达坐标系下);
- 预定义类别:’Car’, ’Van’, ’Truck’, ’Pedestrian’, ’Person (sitting)’, ’Cyclist’, ’Tram’ and ’Misc’
每个对象被分配一个类别和三维尺寸(高、宽、长)、坐标、方向角
传感器同步:
我们在连续旋转的扫描仪底部安装了一个簧片触点,当面向前方时触发摄像头。这将使动态对象引起的范围和图像观察的差异最小化。