最近一直在尝试着分布式深度学习的架构,主要的原因一方面是几台机子全是1060卡,利用深度网络在较大数据样本上训练的效率极其低下,所以尝试着将几台机子做成分布式,看看能否提高训练效率;第二方面是有人习惯使用tensorflow,有人习惯使用keras,也有人喜欢使用pytorch等,虽然这些框架各自都有分布式的实现,但总的来说不能统一到一个平台上,造成使用上有不好的体验。在查资料的时候正好看到了horovod这个框架,它是集成了多个深度框架的一个统一平台,搭建和使用起来都比较方便,所以打算尝试基于horovod搭建一个分布式环境,供后期使用。可惜没有使用docker去部署,其中配置的过程中遇到不少坑,还好都解决了。
一.分布式中的ps架构和ring-allreduce架构
1.ps架构
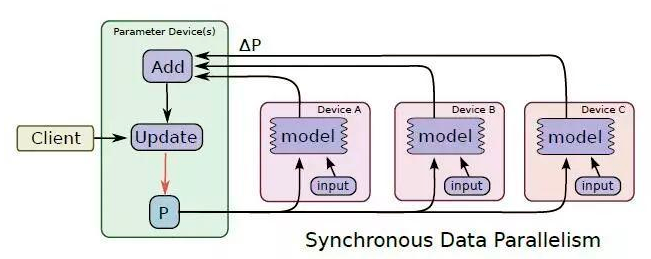
在Parameter server架构(PS架构)中,集群中的节点被分为parameter server和worker两类。其中parameter server收集、更新和存放模型的参数,而worker负责计算模型参 数的梯度。在每个迭代过程中,ps聚合所有worker传回的梯度,然后更新参数,并将新的参数广播给worker。缺点是集群通信不均衡问题,类似木桶效应。
ps架构同步随机梯度下降SGD如下图:

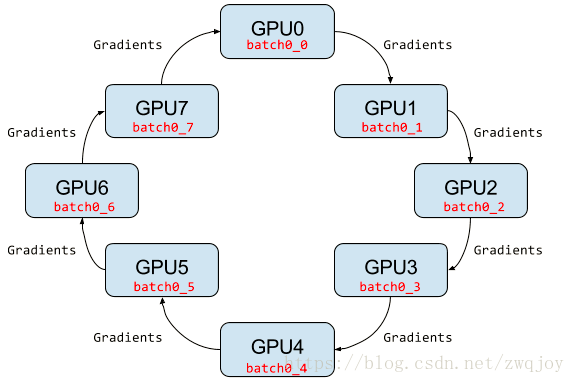
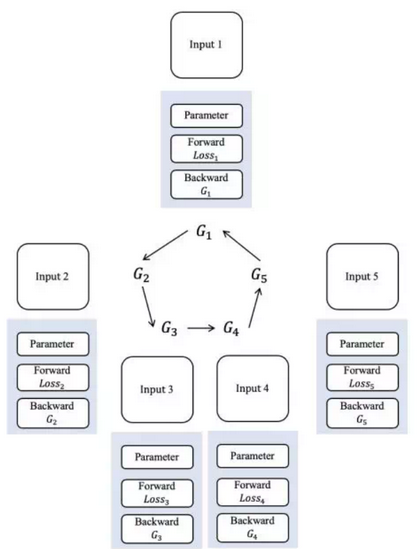
2.ring-allreduce架构
在Ring-allreduce架构中,各个设备都是worker,并且形成一个环,如上图所示,没有中心节点来聚合所有worker计算的梯度。在一个迭代过程,每个worker完成自己的mini- batch训练,计算出梯度,并将梯度传递给环中的下一个worker,同时它也接收从上一个worker的梯度。对于一个包含N个worker的环,各个worker需要收到其它N-1个worker的梯度 后就可以更新模型参数。其实这个过程需要两个部分:scatter-reduce和allgather,百度开发了自己的allreduce框架,并将其用在了深度学习的分布式训练中。如下图。
相比PS架构,Ring-allreduce架构有如下优点:
a. 带宽优化,因为集群中每个节点的带宽都被充分利用。而PS架构,所有的worker计算节点都需要聚合给parameter server,这会造成一种通信瓶颈。parameter server的带宽瓶颈 会影响整个系统性能,随着worker数量的增加,其加速比会迅速的恶化。
b.此外,在深度学习训练过程中,计算梯度采用BP算法,其特点是后面层的梯度先被计算,而前面层的梯度慢于前面层,Ring-allreduce架构可以充分利用这个特点,在前面层梯 度计算的同时进行后面层梯度的传递,从而进一步减少训练时间。在百度的实验中,他们发现训练速度基本上线性正比于GPUs数目(worker数)。
二.准备工作:
1.一开始是利用虚拟机虚拟了三台机子进行了cpu版的成功测试,可惜GPU无法用在虚拟环境上。
2.后来弄了三两台真实的物理机,将原windows都改为linux系统。
a.安装nvidia驱动
b.安装cuda
c.安装cudnn
d.安装pytorch和tf
e.两台机子ssh相互免密码登录
f.nfs共享文件系统(将脚本和样本放在这里),共它机器挂载在此目录下
g.openmpi的安装配置
h.nccl的安装配置
i.horovod的安装配置
(我这里使用的版本是:ubuntu16.0.4、nvidia384.130、cuda9.0、cudnn7.6.4、pytorch1.1.0、tf1.12、nccl2(nccl2.x版本为多机多卡)、openmpi4.0.0...)
注意:在安装这些工具的时候,需要注意各自匹配的版本以及环境的配置,否则安装不成功,需要耐心。
环境在配置好后,进行了测试。有个问题是在指定命令运行的时候,多机多gpu会出现bash: orted: command not found,单机可以运行。这里解决的办法有2种:第一 是在安装 openmpi时指定--prefix=openmpi安装目录;第二种是在运行时指定命令--prefix openmpi安装目录。
三. 利用mnist数字识别进行分布式测试,将测试脚本放在nfs共享目录里,mnist会自动下载训练样本
import argparse import torch.nn as nn import torch.nn.functional as F import torch.optim as optim from torch.utils.tensorboard import SummaryWriter from torchvision import datasets,transforms import torch.utils.data.distributed import horovod.torch as hvd # Training settings parser = argparse.ArgumentParser(description='PyTorch MNIST Example') parser.add_argument('--batch-size', type=int, default=64, metavar='N', help='input batch size for training (default: 64)') parser.add_argument('--test-batch-size', type=int, default=1000, metavar='N', help='input batch size for testing (default: 1000)') parser.add_argument('--epochs', type=int, default=10, metavar='N', help='number of epochs to train (default: 10)') parser.add_argument('--lr', type=float, default=0.01, metavar='LR', help='learning rate (default: 0.01)') parser.add_argument('--momentum', type=float, default=0.5, metavar='M', help='SGD momentum (default: 0.5)') parser.add_argument('--no-cuda', action='store_true', default=False, help='disables CUDA training') parser.add_argument('--seed', type=int, default=42, metavar='S', help='random seed (default: 42)') parser.add_argument('--log-interval', type=int, default=10, metavar='N', help='how many batches to wait before logging training status') parser.add_argument('--fp16-allreduce', action='store_true', default=False, help='use fp16 compression during allreduce') args = parser.parse_args() args.cuda = not args.no_cuda and torch.cuda.is_available() # Horovod: initialize library. hvd.init() torch.manual_seed(args.seed) if args.cuda: # horovod: pin GPU to local rank. torch.cuda.set_device(hvd.local_rank()) torch.cuda.manual_seed(args.seed) #用来记录训练的loss情况,利用tensorboard可视化loss if hvd.rank() == 0: writer = SummaryWriter('/home/user/share/log/mnist_test') # horovod: limit # of cpu threads to be used per worker. torch.set_num_threads(1) kwargs = {'num_workers' : 1, 'pin_memory' : True} if args.cuda else {} train_dataset = datasets.MNIST('/home/user/share/data/', train=True, download=True, transform=transforms.Compose([ transforms.ToTensor(), transforms.Normalize((0.1307,), (0.3081,)) ])) # Horovod: use DistributedSampler to partition the training data. train_sampler = torch.utils.data.distributed.DistributedSampler(train_dataset, num_replicas=hvd.size(), rank=hvd.rank()) train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=args.batch_size, sampler=train_sampler, **kwargs) test_dataset = datasets.MNIST('/home/user/share/data/', train=False, download=True,transform=transforms.Compose([ transforms.ToTensor(), transforms.Normalize((0.1307,), (0.3081,)) ])) # Horovod: use DistributedSampler to partition the test data. test_sampler = torch.utils.data.distributed.DistributedSampler(test_dataset, num_replicas=hvd.size(), rank=hvd.rank()) test_loader = torch.utils.data.DataLoader(test_dataset, batch_size=args.test_batch_size, sampler=test_sampler, **kwargs) class Net(nn.Module): def __init__(self): super(Net,self).__init__() self.conv1 = nn.Conv2d(1, 10, kernel_size=5) self.conv2 = nn.Conv2d(10, 20, kernel_size=5) self.conv2_drop = nn.Dropout2d() self.fc1 = nn.Linear(320, 50) self.fc2 = nn.Linear(50, 10) def forward(self,x): x = F.relu(F.max_pool2d(self.conv1(x), 2)) x = F.relu(F.max_pool2d(self.conv2_drop(self.conv2(x)),2)) x = x.view(-1, 320) x = F.relu(self.fc1(x)) x = F.dropout(x, training=self.training) x = self.fc2(x) return F.log_softmax(x) model = Net() if args.cuda: #move model to GPU model.cuda() # Horovod: scale learning rate by the number of GPUs.由于是多机运行,batch较大,所以这里将学习率增大 optimizer = optim.SGD(model.parameters(), lr=args.lr*hvd.size(), momentum=args.momentum) # Horovod: 广播初始化参数和优化器状态 hvd.broadcast_parameters(model.state_dict(), root_rank=0) hvd.broadcast_optimizer_state(optimizer, root_rank=0) # Horovod: (optional) compression algorithm. compression = hvd.Compression.fp16 if args.fp16_allreduce else hvd.Compression.none # Horovod: wrap optimizer with DistributedOptimizer optimizer = hvd.DistributedOptimizer(optimizer, named_parameters=model.named_parameters(), compression=compression) def train(epoch): model.train() # Horovod: set epoch to sampler for shuffling. train_sampler.set_epoch(epoch) for batch_idx, (data, target) in enumerate(train_loader): if args.cuda: data, target = data.cuda(), target.cuda() optimizer.zero_grad() output = model(data) loss = F.nll_loss(output, target) loss.backward() optimizer.step() if (batch_idx % args.log_interval == 0) and (hvd.rank() == 0): # Horovod: use train_sampler to determine the number of examples in # this worker's partition. print('Train Epoch: {} [{}/{} ({:.0f}%)] Loss: {:.6f}'.format( epoch, batch_idx * len(data), len(train_sampler), 100. * batch_idx / len(train_loader), loss.item())) niter = epoch * len(train_loader) + batch_idx writer.add_scalar('Train/Loss',loss.item(),niter) def metric_average(val, name): tensor = torch.tensor(val) avg_tensor = hvd.allreduce(tensor, name=name) return avg_tensor.item() def test(): model.eval() test_loss = 0. test_accuracy = 0. for data, target in test_loader: if args.cuda: data, target = data.cuda(), target.cuda() output = model(data) # sum up batch loss test_loss += F.nll_loss(output, target, size_average=False).item() # get the index of the max log-probability pred = output.data.max(1, keepdim=True)[1] test_accuracy += pred.eq(target.data.view_as(pred)).cpu().float().sum() # Horovod: use test_sampler to determine the number of examples in # this worker's partition. test_loss /= len(test_sampler) test_accuracy /= len(test_sampler) # Horovod: average metric values across workers. test_loss = metric_average(test_loss, 'avg_loss') test_accuracy = metric_average(test_accuracy, 'avg_accuracy') # Horovod: 在first rank上打印输出 if hvd.rank() == 0: print(' Test set: Average loss: {:.4f}, Accuracy: {:.2f}% '.format( test_loss, 100. * test_accuracy)) for epoch in range(1, args.epochs + 1): train(epoch) test() if hvd.rank() == 0: print('hvd.rank:{}'.format(hvd.rank())) save_path = '/home/user/model/mnist_model.pkl' # 将模型保存在rank为0的机子上 torch.save(model.state_dict(), save_path) print('model save success! path = {}'.format(save_path))
在linux中执行以上脚本的命令是:
nohup mpirun -np 2 -H work_1:1,work_2:1 -bind-to none -map-by slot -x NCCL_DEBUG=INFO -x LD_LIBRARY_PATH -x PATH -mca pml ob1 -mca btl ^openib -prefix /home/user/openmpi python -u /home/user/share/torch/test_mnist.py > /home/user/share/log/test_mnist.log 2>&1 &
其中两台机器为work_1和work_2,分别使用一个GPU;脚本名为test_mnist.py;test_mnist.log为日志。
参考:
1.https://blog.csdn.net/zwqjoy/article/details/81013527
2.https://www.cnblogs.com/goya/p/11790387.html