
在HDevelop中
read_image (Image9, 'D:/bb/tu/9.jpg')
rgb1_to_gray (Image9, GrayImage)
threshold (GrayImage, Region, 200, 255)
connection (Region, ConnectedRegions)
select_shape (ConnectedRegions, SelectedRegions, 'area', 'and', 15400, 15500)
smallest_rectangle1 (SelectedRegions, Row1, Column1, Row2, Column2)
*返回最小外接正矩形数据
gen_rectangle1 (Rectangle, Row1+10, Column1-10, Row2-10, Column2+10)
*创建一个平行于坐标轴的矩形区域
*说明:行往里缩小的目的:亚像素边缘时可以去掉上下的边
reduce_domain (GrayImage, Rectangle, ImageReduced)
**获取区域图像
edges_sub_pix (ImageReduced, Edges, 'canny', 1, 20, 40)
*亚像素边缘
sort_contours_xld (Edges, SortedContours, 'upper_left', 'true', 'column')
select_obj (Edges, ObjectSelected, 1)
select_obj (Edges, ObjectSelected1, 2)
get_contour_xld (ObjectSelected, Row, Col)
get_contour_xld (ObjectSelected1, Row3, Col1)
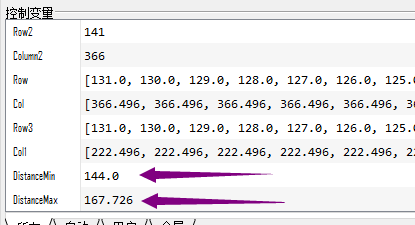
distance_cc (ObjectSelected, ObjectSelected1, 'point_to_point', DistanceMin, DistanceMax)
*计算两个轮廓之间最小和最大的距离
*参数1:第一个轮廓
*参数2:第二个输入轮廓
*参数3:距离计算模式
* 'point_to_point' 确定轮廓线之间的最小和最大距离
* 'point_to_segment' 轮廓线段之间的实际最小距离
*参数4:返回两个轮廓之间的最小距离
*参数5:两个轮廓之间的最大距离
在QtCreator中
HObject ho_Image9, ho_GrayImage, ho_Region, ho_ConnectedRegions;
HObject ho_SelectedRegions, ho_Rectangle, ho_ImageReduced;
HObject ho_Edges, ho_SortedContours, ho_ObjectSelected;
HObject ho_ObjectSelected1;
HTuple hv_Row1, hv_Column1, hv_Row2, hv_Column2;
HTuple hv_Row, hv_Col, hv_Row3, hv_Col1, hv_DistanceMin;
HTuple hv_DistanceMax;
ReadImage(&ho_Image9, "D:/bb/tu/9.jpg");
Rgb1ToGray(ho_Image9, &ho_GrayImage);
Threshold(ho_GrayImage, &ho_Region, 200, 255);
Connection(ho_Region, &ho_ConnectedRegions);
SelectShape(ho_ConnectedRegions, &ho_SelectedRegions, "area", "and", 15400, 15500);
SmallestRectangle1(ho_SelectedRegions, &hv_Row1, &hv_Column1, &hv_Row2, &hv_Column2);
//返回最小外接正矩形数据
GenRectangle1(&ho_Rectangle, hv_Row1+10, hv_Column1-10, hv_Row2-10, hv_Column2+10);
//创建一个平行于坐标轴的矩形区域
//说明:行往里缩小的目的:亚像素边缘时可以去掉上下的边
ReduceDomain(ho_GrayImage, ho_Rectangle, &ho_ImageReduced);
//*获取区域图像
EdgesSubPix(ho_ImageReduced, &ho_Edges, "canny", 1, 20, 40);
//亚像素边缘
SortContoursXld(ho_Edges, &ho_SortedContours, "upper_left", "true", "column");
SelectObj(ho_Edges, &ho_ObjectSelected, 1);
SelectObj(ho_Edges, &ho_ObjectSelected1, 2);
GetContourXld(ho_ObjectSelected, &hv_Row, &hv_Col);
GetContourXld(ho_ObjectSelected1, &hv_Row3, &hv_Col1);
DistanceCc(ho_ObjectSelected, ho_ObjectSelected1, "point_to_point", &hv_DistanceMin,
&hv_DistanceMax);
//计算两个轮廓之间最小和最大的距离
//参数1:第一个轮廓
//参数2:第二个输入轮廓
//参数3:距离计算模式
// 'point_to_point' 确定轮廓线之间的最小和最大距离
// 'point_to_segment' 轮廓线段之间的实际最小距离
//参数4:返回两个轮廓之间的最小距离
//参数5:两个轮廓之间的最大距离
