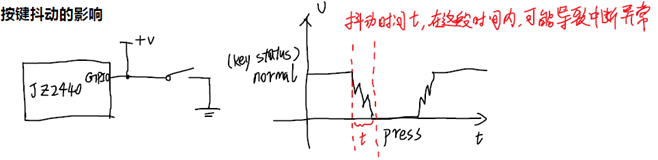
消除抖动的实现方法
在发生中断后,延时一段时间(抖动时间t),再去读取按键值;
这里实现这段延时的方法就是使用定时器;
当按键发生中断时,启动定时器,定时器延时t秒后,再读取键值。
实例
driver.c
1 #include <linux/module.h>
2 #include <linux/kernel.h>
3 #include <linux/fs.h>
4 #include <linux/init.h>
5 #include <linux/delay.h>
6 #include <linux/irq.h>
7 #include <asm/uaccess.h>
8 #include <asm/irq.h>
9 #include <asm/io.h>
10 #include <asm/arch/regs-gpio.h>
11 #include <asm/hardware.h>
12
13
14 static int major;
15
16 static struct class *myKey_class;
17 static struct class_device *myKey_class_dev;
18
19 volatile unsigned long *gpfcon;
20 volatile unsigned long *gpfdat;
21
22 volatile unsigned long *gpgcon;
23 volatile unsigned long *gpgdat;
24
25 //static DECLARE_WAIT_QUEUE_HEAD(button_waitq);
26 //static volatile int ev_press = 0;
27
28 static struct fasync_struct *button_fasyncq;
29
30 //定义原子变量,并初始化为1
31 static atomic_t
canOpen = ATOMIC_INIT(1);
32
33 //定义一个定时器
34 static struct timer_list buttons_timer;
35
36 //normal:1; press:0;
37 static unsigned char keyVal = 0;
38
39 struct pin_desc {
40 unsigned int pin;
41 unsigned int key_val;
42 };
43
44 /*
45 * 按键按下键值为0x01,...; 松开键值为0x81,...
46 */
47 struct pin_desc pins_desc[3] = {
48 {S3C2410_GPF0, 0x01},
49 {S3C2410_GPF2, 0x02},
50 {S3C2410_GPG11, 0x03},
51 };
52
53 struct pin_desc *irq_pd;
54
55 static int myKey_open(struct inode *inode, struct file
*file);
56 static int myKey_close(struct inode *inode, struct file *file);
57 static ssize_t myKey_read(struct file *file, char __user *buf, size_t size, loff_t *ppos);
58 static int myKey_fasync(int fd, struct file *filp, int on);
59
60
61 static struct file_operations myKey_fops = {
62 .open = myKey_open,
63 .read = myKey_read,
64 .owner = THIS_MODULE,
65 .release = myKey_close,
66 .fasync = myKey_fasync,
67 };
68
69
70 static irqreturn_t handle_buttons(int irq, void *pin_dc)
71 {
72 /* 每次发生中断,10ms后启动定时器,定时器超时,再读取键值,实现按键消抖 */
73 irq_pd = (struct pin_desc*)pin_dc;
74 mod_timer(&buttons_timer, jiffies+HZ/100); //修改定时器超时时间,启动定时器
75
76 return IRQ_RETVAL(IRQ_HANDLED);
77 }
78
79
80 static int myKey_open(struct inode *inode, struct file *file)
81 {
82 /*
83 *当原子变量为1时,驱动程序处于空闲状态,可被打开,否则打开失败并返回
84 */
85 if (!atomic_dec_and_test(&canOpen)) //atomic_dec_and_test――原子变量自减,结果为0返回ture,否则返回false
86 {
87 //atomic_inc――原子变量自加
88 atomic_inc(&canOpen); //恢复原子变量为原来值
89 return -EBUSY;
90 }
91
92 request_irq(IRQ_EINT0, handle_buttons, IRQT_BOTHEDGE, "S2", &pins_desc[0]);
93 request_irq(IRQ_EINT2, handle_buttons, IRQT_BOTHEDGE, "S3", &pins_desc[1]);
94 request_irq(IRQ_EINT19, handle_buttons, IRQT_BOTHEDGE, "S5", &pins_desc[2]);
95
96 return 0;
97 }
98
99
100 static int myKey_close(struct inode *inode, struct file *file)
101 {
102 atomic_inc(&canOpen); //关闭驱动,恢复原子变量默认值
103
104 free_irq(IRQ_EINT0, &pins_desc[0]);
105 free_irq(IRQ_EINT2, &pins_desc[1]);
106 free_irq(IRQ_EINT19, &pins_desc[2]);
107
108 return 0;
109 }
110
111 int myKey_fasync(int fd, struct file *filp, int on)
112 {
113 printk("driver: fasync_init
");
114 fasync_helper(fd, filp, on, &button_fasyncq);
115
116 return 0;
117 }
118
119 static ssize_t myKey_read(struct file *file, char __user *buf, size_t size, loff_t *ppos)
120 {
121 //无中断进入休眠
122 //wait_event_interruptible(button_waitq, ev_press);
123
124 //ev_press = 0; //清除中断发生标志
125 copy_to_user(buf, &keyVal, 1);
126 return 0;
127 }
128
129
130 void handle_buttons_timer(unsigned long data)
131 {
132 unsigned int kval;
133 struct pin_desc *pinDesc = irq_pd;
134
135 //定时器初次初始化完成,超时处理,此时并未发生过按键中断
136 if (!pinDesc)
137 {
138 return;
139 }
140
141 kval = s3c2410_gpio_getpin(pinDesc->pin);
142 if (kval) //松开
143 {
144 keyVal = 0x80 | pinDesc->key_val;
145 }
146 else { //按下
147 keyVal = pinDesc->key_val;
148 }
149
150 //唤醒休眠进程
151 //ev_press = 1; //中断发生标志
152 //wake_up_interruptible(&button_waitq);
153
154 kill_fasync(&button_fasyncq, SIGIO, POLL_IN);
155 }
156
157
158 static int __init myKey_init(void)
159 {
160 /* 初始化定时器 */
161 init_timer(&buttons_timer);
162 buttons_timer.expires = 0; //设置定时器超时,默认初始化完成后进入休眠
163 buttons_timer.function = handle_buttons_timer; //注册定时器超时处理函数
164 add_timer(&buttons_timer);
165
166 /* 物理地址映射成虚拟地址 */
167 gpfcon = (volatile unsigned long*)ioremap(0x56000050, 16);
168 gpfdat = gpfcon + 1;
169
170 gpgcon = (volatile unsigned long*)ioremap(0x56000060, 16);
171 gpgdat = gpgcon + 1;
172
173 major = register_chrdev(0, "myKey", &myKey_fops);
174
175 myKey_class = class_create(THIS_MODULE, "myKeyclass");
176 myKey_class_dev = class_device_create(myKey_class, NULL, MKDEV(major, 0), NULL, "myKey");
177
178 return 0;
179 }
180
181 static void __exit myKey_exit(void)
182 {
183 /* 释放虚拟地址映射 */
184 iounmap(0x56000050);
185 iounmap(0x56000060);
186
187 unregister_chrdev(major, "myKey");
188
189 class_device_unregister(myKey_class_dev);
190 class_destroy(myKey_class);
191 return;
192 }
app.c
1 #include <sys/types.h>
2 #include <sys/stat.h>
3 #include <fcntl.h>
4 #include <stdio.h>
5 #include <signal.h>
6 #include <unistd.h>
7
8 int fd;
9
10 void handle_signal(int signum)
11 {
12 unsigned char keyVal;
13
14 read(fd, &keyVal, 1);
15 printf("keyVal: 0x%x
", keyVal);
16
17 return;
18 }
19
20
21 int main (void)
22 {
23 int oflag = 0;
24
25 printf("test app!
");
26
27 fd = open("/dev/myKey", O_RDWR);
28 if(fd < 0)
29 {
30 printf("open failed! %d
", fd);
31 return -1;
32 }
33
34 signal(SIGIO, handle_signal);
35
36 fcntl(fd, F_SETOWN, getpid());
37 oflag = fcntl(fd, F_GETFL);
38 fcntl(fd, F_SETFL, oflag | O_ASYNC);
39
40 while(1)
41 {
42 sleep(5);
43 }
44 return 0;
45 }
Makefile
1 KERN_DIR = /work/system/linux-2.6.22.6
2
3 all:
4 make -C $(KERN_DIR) M=`pwd` modules
5
6 clean:
7 make -C $(KERN_DIR) M=`pwd` modules clean
8 rm -rf modules.order
9
10 obj-m += myKey_all.o