一 H.264句法
1.1元素分层结构
H.264编码器输出的Bit流中,每个Bit都隶属于某个句法元素。句法元素被组织成有层次的结构,分别描述各个层次的信息。
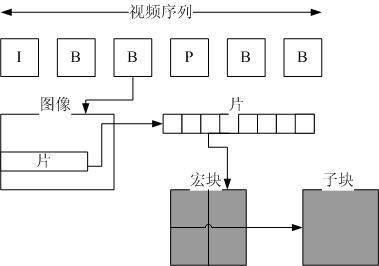
图1
H.264分层结构由五层组成,分别是序列参数集、图像参数集、片(Slice)、和宏块和子块。参数集是一个独立的数据单位,不依赖于参数集外的其它句法元素。图2描述了参数集与参数集外的句法元素之间的关系。

图2
一个参数集不对应某一个特定的图像或序列,同一序列参数集可以被多个图像参数集引用,同理,同一个图像参数集也可以被多个图像引用。只在编码器认为需要更新参数集的内容时,才会发出新的参数集。
在H.264中,图像以序列为单位进行组织。一个序列的第一个图像叫做IDR图像,IDR图像都是I帧,H.264引入IDR图像为了解码的同步,当解码器解码到IDR图像时,立即将参考帧队列清空,将已解码的数据全部输出或抛弃,重新查找参数集,开始一个新的序列。这样,如果前一个序列出现重大错误,在这里可以获得重新同步的机会。IDR图像之后的图像永远不会使用IDR之前的图像的数据来解码。
IDR是I帧,但I帧不一定是IDR。I帧之后的图像有可能会使用I帧之前的图像做运动参考。
1.2描述子
描述子描述从Bit流中取出句法元素的方法。
|
编号 |
语法 |
说明 |
|
1 |
ae(e) |
CABAC |
|
2 |
b(8) |
读进连续的8个Bit |
|
3 |
ce(v) |
CAVLC |
|
4 |
f(n) |
读进连续的n个Bit |
|
5 |
i(n)/i(v) |
读进连续的若干Bit,并把它们解释为有符号整数 |
|
6 |
me(v) |
映射指数Golomb熵编码 |
|
7 |
se(v) |
有符号指数Golomb熵编码 |
|
8 |
te(v) |
截断指数Golomb熵编码 |
|
9 |
u(n)/u(v) |
读进连续的若干Bit,并把它们解释为无符号整数 |
|
10 |
ue(v) |
无符号指数Golomb熵编码 |
表1
1.3句法的表示方法
句法元素的名称由小写字母和一系列下划线组成,变量名称是大小写字母组成,中间没有下划线。
二 句法表
定义了H.264的句法,指明在码流中依次出现的句法元素及它们出现的条件、提取描述子等。句法表是分层嵌套的。
句法表中的C字段表示该句法元素的分类,这是为片区服务,分类的具体含义如下表描述。
|
nal_unit_type |
NAL类型 |
C |
|
0 |
未使用 |
|
|
1 |
不分区、非IDR的片 |
2,3,4 |
|
2 |
片分区A |
2 |
|
3 |
片分区B |
3 |
|
4 |
版分区C |
4 |
|
5 |
IDR图像中的片 |
2,3 |
|
6 |
补充增强信息单元(SEI) |
5 |
|
7 |
序列参数集 |
0 |
|
8 |
图像参数集 |
1 |
|
9 |
分界符 |
6 |
|
10 |
序列结束 |
7 |
|
11 |
码流结束 |
8 |
|
12 |
填充 |
9 |
|
13..23 |
保留 |
|
|
24..31 |
不保留 |
|
表2
2.1 NAL语法
编码器将每个NAL各自独立、完整地放入一个分组,因为分组都有头部,解码器可以方便地检测出NAL的分界,并依次取出NAL进行解码。
每个NAL前有一个起始码 0x000001,解码器检测每个起始码,作为一个NAL的起始标识,当检测到下一个起始码时,当前NAL结束。同时H.264规定,当检测到0x000000时,也可以表征当前NAL的结束。对于NAL中数据出现0x000001或0x000000时,H.264引入了防止竞争机制,如果编码器检测到NAL数据存在0x000001或0x000000时,编码器会在最后个字节前插入一个新的字节0x03,这样:
0x000000->0x00000300
0x000001->0x00000301
0x000002->0x00000302
0x000003->0x00000303
解码器检测到0x000003时,把03抛弃,恢复原始数据。
解码器在解码时,首先逐个字节读取NAL的数据,统计NAL的长度,然后再开始解码。
|
句法 |
C |
Desc |
|
nal_nuit(NumBytesInNALunit){/* NumBytesInNALunit为统计出来的数据长度 */ |
|
|
|
forbidden_zero_bit /* 等于0 */ |
All |
f(1) |
|
nal_ref_idc/* 当前NAL的优先级,取值范围0-3 */ |
All |
u(2) |
|
nal_unit_type /* NAL类型,见表2描述 */ |
All |
u(5) |
|
NumBytesInRBSP=0 |
|
|
|
for(i=1;i<NumBytesInNALunit;i++){ |
|
|
|
if(i+2<NumBytesInNALunit && next_bits(24)==0x000003{ |
|
|
|
/* 0x000003伪起始码,需要删除0x03这个字节 */ |
|
|
|
rbsp_byte[NumBytesInRBSP++] |
All |
b(8) |
|
rbsp_byte[NumBytesInRBSP++] |
All |
b(8) |
|
i+=2/* 取出前两个0x00后,跳过0x03 */ |
|
|
|
emulation_prevention_three_byte/* equal to 0x03 */ |
All |
f(8) |
|
}else{ |
|
|
|
rbsp_byte[NumBytesInRBSP++] /* 继续读取后面的字节 */ |
All |
b(8) |
|
} |
|
|
|
} |
|
表3
2.2序列参数集(SPS)
|
句法 |
C |
Desc |
|
seq_parameter_set_rbsp(){ |
|
|
|
profile_idc/* 指明所用的Profile */ |
0 |
u(8) |
|
constraint_set0_flag |
0 |
u(1) |
|
constraint_set1_flag |
0 |
u(1) |
|
constraint_set1_flag |
0 |
u(1) |
|
reserved_zero_5bits /* equal to 0 */ |
0 |
u(5) |
|
level_idc /* 指明所用的Level */ |
0 |
u(8) |
|
seq_parameter_set_id /* 指明本序列参数集的id号,0-31,被图像集引用,编码需要产生新的序列集时,使用新的id,而不是改变原来参数集的内容 */ |
0 |
ue(v) |
|
log2_max_frame_num_minus4/* 为读取元素frame_num服务,frame_num标识图像的解码顺序,frame_num的解码函数是ue(v),其中v=log2_max_frame_num_minus4+4,该元素同时指明frame_num的最大值MaxFrameNum=2( log2_max_frame_num_minus4+4)*/ |
0 |
ue(v) |
|
pic_order_cnt_type /* 指明poc的编码方法,poc标识图像的播放顺序,poc可以由frame_num计算,也可以显示传送。poc共三种计算方式 */ |
0 |
ue(v) |
|
if(pic_order_cnt_type==0) |
|
|
|
log2_max_pic_order_cnt_lsb_minus4 /* 指明变量MaxPicOrderCntLsb的值,MaxPicOrderCntLsb=2(log2_max_pic_order_cnt_lsb_minus4+4) */ |
0 |
ue(v) |
|
else if(pic_order_cnt_type==1){ |
|
|
|
delta_pic_order_always_zero_flag /* 等于1时,元素delta_pic_order_cnt[0]和delta_pic_order_cnt[1]不在片头中出现,并且它们的默认值是0,等于0时,上述两元素出现的片头中 */ |
0 |
u(1) |
|
offset_for_non_ref_pic /* 用来计算非参考帧或场的poc,[-231,231-1] */ |
0 |
se(v) |
|
offset_for_top_to_bottom_field/* 计算帧的底场的poc */ |
0 |
se(v) |
|
num_ref_frames_inpic_order_cnt_cycle /* 用来解码poc,[0.255] */ |
0 |
ue(v) |
|
for(i=0;i<num_ref_frames_inpic_order_cnt_cycle;i++) |
|
|
|
offset_for_ref_frame[i]/* 用来解码poc,对于循环中的每个元素指定一个偏移 */ |
0 |
se(v) |
|
} |
|
|
|
num_ref_frames /* 参考帧队列可达到的最大长度,[0,16] */ |
0 |
ue(v) |
|
gaps_in_frame_num_value_allowed_flag /* 为1,允许slice header中的frame_num不连续 */ |
0 |
u(1) |
|
pic_width_inmbs_minus1 /* 本元素加1,指明以宏块为单位的图像宽度PicWidthInMbs=pic_width_in_mbs_minus1+1 */ |
0 |
ue(v) |
|
pic_height_in_map_units_minus1 /* 本元素加1,指明以宏块为单位的图像高宽度PicHeightInMapUnitsMbs=pic_height_in_map_units_minus1+1 */ |
0 |
ue(v) |
|
frame_mbs_only_flag /* 等于0表示本序列中所有图像均为帧编码;等于1,表示可能是帧,也可能场或帧场自适应,具体编码方式由其它元素决定。结合前一元素:FrameHeightInMbs=(2-frame_mbs_only_flag)*PicHeightInMapUnits */ |
0 |
ue(v) |
|
if(frame_mbs_only_flag) |
|
|
|
mb_adaptiv_frame_field_flag /* 指明本序列是否是帧场自适应模式: frame_mbs_only_flag=1,全部是帧 frame_mbs_only_flag=0, mb_adaptiv_frame_field_flag=0,帧场共存 frame_mbs_only_flag=0, mb_adaptiv_frame_field_flag=1,帧场自适应和场共存*/ |
0 |
u(1) |
|
direct_8x8_inference_flag /* 用于指明B片的直接和skip模式下的运动矢量的计算方式 */ |
0 |
u(1) |
|
frame_cropping_flag /* 解码器是否要将图像裁剪后输出,如果是,后面为裁剪的左右上下的宽度 */ |
0 |
u(1) |
|
if(frame_cropping_flag){ |
|
|
|
frame_crop_left_offset |
0 |
ue(1) |
|
frame_crop_right_offset |
0 |
ue(1) |
|
frame_crop_top_offset |
0 |
ue(1) |
|
frame_crop_bottom_offset |
0 |
ue(1) |
|
} |
|
|
|
vui_parameters_present_flag /* 指明vui子结构是否出现在码流中,vui子结构在附录中指明,用于表征视频格式的信息 */ |
0 |
u(1) |
|
if(vui_parameters_present_flag) |
|
|
|
vui_parameters() |
0 |
|
|
rbsp_trailing_bits() |
0 |
|
|
} |
|
表4