2014 ICLR
纽约大学 LeCun团队
Pierre Sermanet, David Eigen, Xiang Zhang, Michael Mathieu, Rob Fergus, Yann LeCun
简单介绍(What)
Ovefeat是2013年ImageNet定位任务的冠军,同时在分类和检测任务也取得了不错的结果。
- 它用一个共享的CNN来同时处理图像分类,定位,检测三个任务,可以提升三个任务的表现。
- 它用CNN有效地实现了一个多尺度的,滑动窗口的方法,来处理任务。
- 提出了一种方法,通过累积预测来求bounding boxes(而不是传统的非极大值抑制)。
论文动机(Why)
虽然ImageNet的数据包含一个大致充满图像的中心目标,但是目标在图像中的大小和位置有着显著差异。解决这个问题有几个做法。
- 使用多个固定大小的滑动窗口移动,对每个扫过的窗口图像做CNN预测。该方法的缺点在于窗口没有包含整个目标,甚至中心也没有,只是包含了一部分(比如狗狗的头),虽然适合做分类,但是定位和检测效果很差。
- 训练一个卷积网络,不仅产生分类的分布,还产生预测框bouding box(预测目标的大小和位置)。
- 累积每个位置和尺寸对应类别的置信度。
AlexNet展示了CNN可在图像分类和定位任务上取得了优秀的表现,但是并没有公开描述他们的定位方法。
这篇论文是第一次清晰地解释CNN如何用于定位和检测。
视觉任务(How)
论文探索了图像处理的三大任务,按难度上升的顺序分别是:
- 分类(classification),给每一张图像打标签,表示是什么物体。只要概率最大的前5个中有一个是正确的就认为是正确(top5)。
- 定位(localization),除了打标签,还需要给出目标的位置大小,而且bounding box和真实框的相似度必须达到阈值(比如交并比至少要为0.5)。也有top5指标,5个标签必须有一个标签,分类正确且边框符合条件,才算正确。
- 检测(detection),一张图像有很多个目标物体,需要全部找出来(分类并定位)。分类和定位使用同一个数据集,而检测使用另外的数据集,里面的物体会更小一些。
- 下面分为三个部分来讲讲论文是怎么做的(分类,定位和检测),重点主要是讲述分类任务,然后是定位任务,至于最后的检测任务论文没怎么提具体做法,就稍微提了一下。
分类任务
-
论文的网络结构和alexNet很类似,在网络设计和测试阶段的做法上做了一些改进。论文的网络分为两个版本,一个快速版,一个精确版。下图是精确版的网络结构图。

-
该网络和alexNet类似,有几点不同,一是没有使用对比归一化,二是没有使用重叠的池化,三是stride的超参用2代替了4,大stride可以提升速度,减小精度。
-
该网络和alexNet最大的不同之处在于测试阶段使用了不同的方法来预测。
-
alexNet在测试阶段对256*256的图像做裁剪(四个角落和中间)和水平翻转,得到5*2也就是10张227*227的图像,然后送进网络里面得到10个结果求平均来进行预测。这样的做法有两个问题,裁剪时可能忽略了图像的一些区域,以及10张图像有很多重叠部分导致了冗余计算。
-
该网络的测试阶段,用到了多尺度的,滑动窗口的方法(实验最多输入了6个不同尺度的图像)。这也是论文最大的创新点。
多尺度分类——全卷积(全卷积意为全部都是卷积层)
- 上图中各层的输入大小是训练时的,由于在测试时会输入6张不同尺寸的图,所以大小肯定都不一样的。
- 全卷积是什么:上图中后三层的全连接层实际上使用的是全卷积,全连接层是可以转为全卷积的,举例来说,全连接层的输入shape为5*5*1024的feature map,输出为4096的话,参数个数就是5*5*1024*4096,这个时候转为全卷积层,那么卷积的参数就是,卷积核大小为5*5*1024,卷积核个数为4096,二者的参数量是一样的。
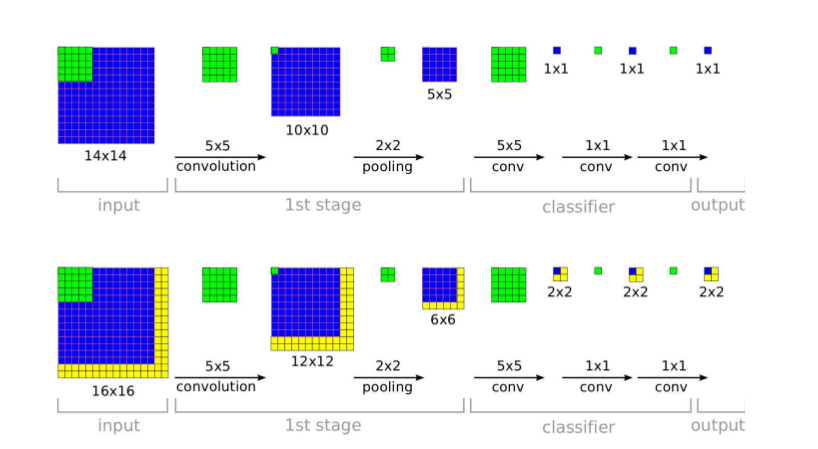
- 全卷积导致了什么:如下图所示,对14*14的图像进行卷积操作,在得到5*5的feature map后的这一步,如果使用全连接,就会把它压平再全连接,这样就破坏了feature map的图像位置关系,直接转为一列特征。但是如果使用的是全卷积,最后会得到1*1*C的feature map,C是channel数,也是类别的大小。这个时候如果来了一张16*16的图像,经过全卷积后就会得到2*2*C的feature map,这个时候可以对这个2*2的4个值做一个取最大或平均,就会变成一个值了,以此类推,来了更大的图像,最后得到的feature map就是3*3*C,4*4*C,5*5*C的大小,输出的大小和输入的大小相关,但总是可以对这个输出map池化(取最大)来得到这个类别的值。
- 全卷积的好处:下图中第一个图是训练时用14*14的图像,最后产生一个输出,下面的图是测试时,可以用16*16的图像产生了“2*2”个输出,以此类推我们可以在测试时使用更大的图像(使用多scale),产生“更多”的输出进行(取最大)预测。这个做法相对于传统的滑动窗口(用14*14大小,步长为2的滑动窗口在16*16的图像上执行4次卷积操作进行分类)的优点是,只需要执行一次,保证了效率同时可以建模用各种不同尺度图像,不局限于固定的裁剪翻转方式(相对于alexNet测试阶段的做法),而且消除了很多冗余计算,提高了模型的鲁棒性又保证了效率。
多尺度分类——offset池化
-
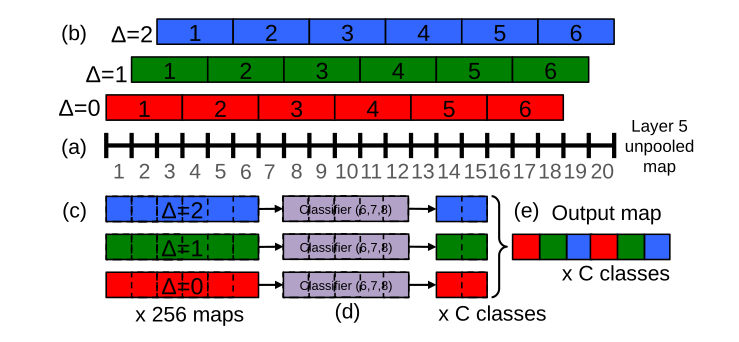
为了解释结合offset池化后最后计算出来的输出,以下图为例,(a)是第5层得到的暂未池化的一张图的某一维,比如图的大小为20*23,下图中画出的是20*23中的20。(20*23是后面的scale2在第5层得到的一个图的大小,后面我们会用到6个scale,这里以scale2的某一维为例子)。
-
传统的做法,对长度为20的序列进行3*3的最大池化后会得到长度为6的序列,就是(b)中(Delta = 0)这样的池化
-
offset池化就是移动一定的位置再池化,(b)中(Delta = 0, 1, 2)就可以表示可以做三种池化,得到三个结果,因为图像是二维的,所以最后会得到3*3也就是9种池化结果,最后对于每个类别就有9个结果,可以对这些结果集成预测(下图的例子中只考虑一维的所以图中最后会得到三个结果,红蓝绿三种颜色表示三种池化后得到的结果)。
-
(c)表示进行3*3池化后得到6*6的图(6个格子)。(d)表示经过5*5的全卷积得到2*2的图(2个格子)。e表示把位置信息(长度为2)和offset方式(3种)交错后得到的最后的输出图。
-
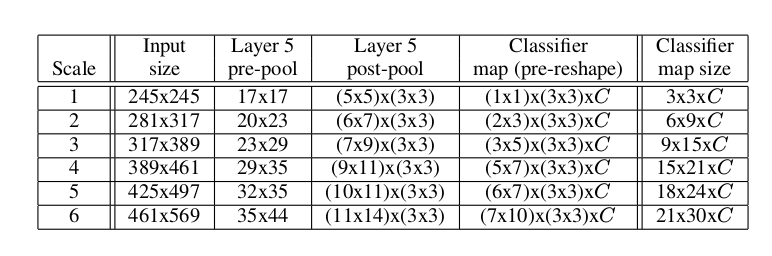
上述这个操作会对重复6*2也就是12次,其中6代表6个scale,如下图所示的6个不同的scale,而2表示水平翻转后会得到两个图。
-
在这12次里面的每一次,对位置信息取最大,以Scale2为例,最后大小为6x9xC,就在这6x9个值中取最大。
-
那么就会得到12个长度为C的向量,12个向量加起来取平均,得到一个长度为C的向量,然后求Top1或Top5,得到最后的结果。
验证集上的分类结果
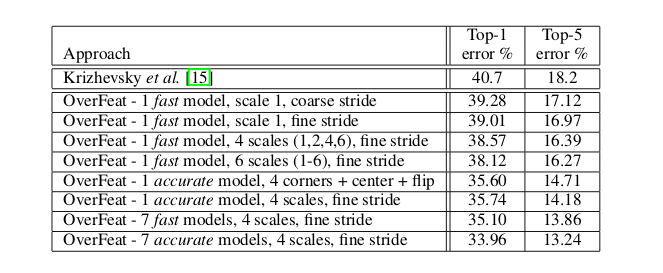
其中coarse stride表示(Delta=0),fine stride表示(Delta=0,1,2)。
- 使用fine stride可以提升模型表现,但是提升不大,说明实际上offset-pooling在这里的作用不大。
- 使用多scale,增加scale可以提升模型表现。
- 最后多模型融合,又提升了表现
定位任务
- 前面提到的分类任务中,1到5层做特征提取网络,6到输出层作为分类网络,这个时候只要在5层(池化后的)后面接一个回归网络就可以来做定位了。
- 训练的时候固定特征提取网络,根据box和真实box之间的l2损失进行训练。
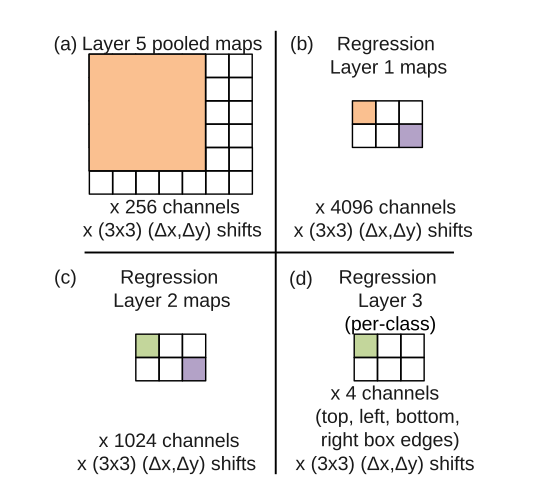
- 如下图所示,同样以scale2为例,第五层输出的是6*7的图,通过回归网络的一系列卷积后,得到2*3个位置信息(2*3个box),4个channel表示box的四个边值(坐标)。
- 回归层最后是1000个版本(类),下图中只是表示了一个类。
累积预测
- 对于回归网络得到的一系列bounding box,该论文不是通过传统的非极大值抑制,而是使用了累积预测的方法。
- 首先对于每个scale计算出前k个类别,对每个类别计算出所有的bouding box。
- 然后合并所有scale的bounding box得到集合(B),重复以下步骤
- ((b_1^*, b_2^*) = arg min_{b_1 eq b_2 in B} match\_score(b_1, b_2))
- 假如,(match\_score(b_1, b_2) > t),则停止
- 否则,(B leftarrow B verb|| { b_1^*, b_2^* } cup box\_merge(b_1^*, b_2^*))
其中(match\_score(b_1, b_2))计算的是两个box中点的距离和交集区域的面积之和,当它大于某个阈值时算法停止(box\_merge(b_1^*, b_2^*))计算的是两个box坐标的平均值。
通过合并具有高置信度的box来得到最终预测。
这种方法可以淘汰那些低置信度以及低连续(多个box相差很远)的类别,会更加鲁棒。
检测任务
- 检测的训练和分类的训练差不多,只是分类最后输出的是1*1的一个输出,而检测产生的是n*n的spatial输出,一张图像的多个位置被同时训练。
- 和定位任务相比,最主要的不同是需要预测一个背景类,考虑一个图像没有物体时。
总结
- 本文使用一个CNN来集成三个任务,分类,定位和检测(共享前层的特征)。
- 第一次具体解释了CNN是如何被用于定位和检测的。
- 提出了一个多尺度的,滑动窗口的方法,能够提升任务的表现。
- 在多尺度分类这一块,在feature map上滑窗,相比于传统的原始图像滑窗(用一个滑窗对整幅图像进行密集采样,然后处理每一个采样得到的图像,再组合结果),大大提高了效率。